Zt
поворота. На планке 7 установлен ролик 8. В копирном пазу 5 расположен копирный ролик 9, закрепленный на корпусе 1 и образующий с копирным пазом 5 копирную пару. На корпусе 1 ус тановлено с возможностью поворота ко- ромысло 11, выполненное в виде трех- плечего рычага, на одном плече которого закреплен кулачок 12 с двумя ра бочими профилями. Кулачок 12 вместе
00873
с коромыслом 11 имеет возможность занимать две позиции (вправо или влево от оси манипулятора). Для фиксации этих позиц1-1Й предусмотрены закреплен- ные на корпусе 1 упоры-штыри 13 и 14. На подвижной гильзе 4 закреплены дополнительные упоры 15 и 16, предназначенные для взаимодействия через плечи 17 и 18 коромысла 11 с размещенными на нем кулачком 12. 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ установки деталей и устройство для его осуществления | 1988 |
|
SU1577936A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Манипулятор | 1981 |
|
SU1013257A2 |
| Устройство для перемещения деталей от пресса | 1986 |
|
SU1388161A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Устройство для обработки участков стенок полых осесимметричных изделий | 1985 |
|
SU1263400A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Полуавтомат для стачивания деталей по заданному контуру | 1974 |
|
SU506665A1 |
| Устройство для автоматической смены инструмента | 1984 |
|
SU1318385A1 |
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |

Изобретение относится к технологическому оборудованию для механизации и автоматизации производственных процессов на операциях загрузки, выгрузки металлорежущих станков. Целью изобретения является повышение точности позиционирования. На наружной поверхности подвижной гильзы 4 установлена планка 7 с возможностью ее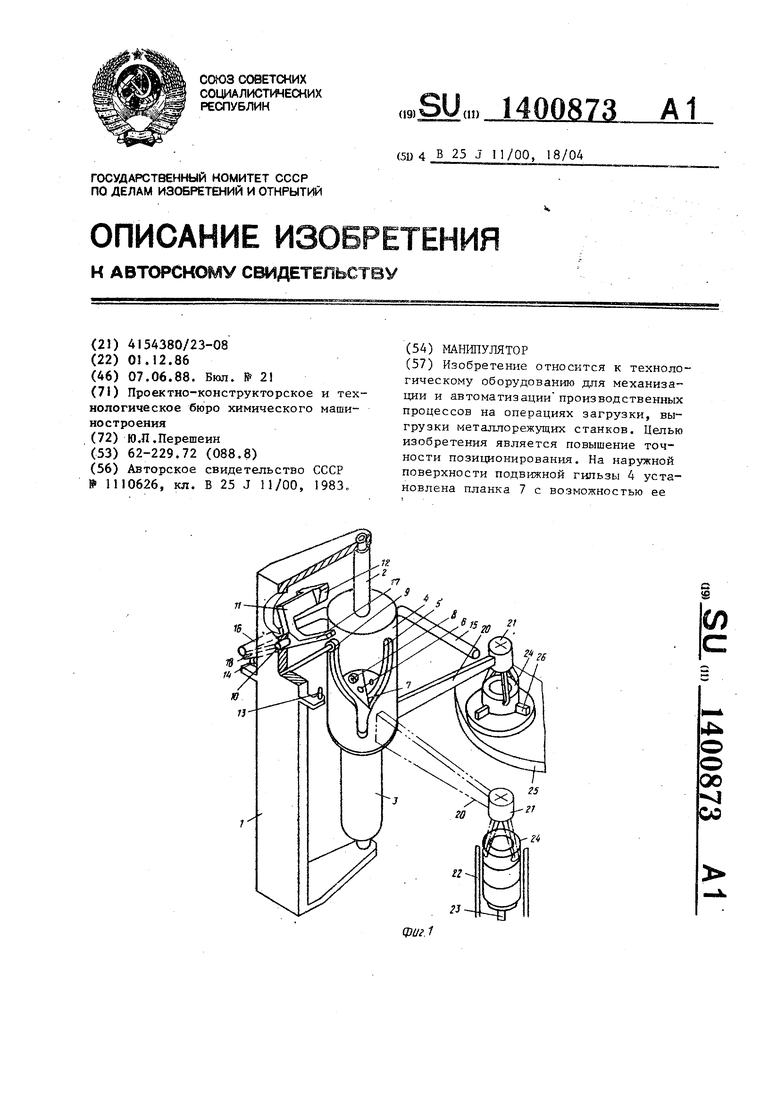
1
Изобретение относится к технологическому оборудованию для механизации и автоматизации производственных процессов на операциях загрузки, выгруз- ки металлорежущих станков.
Цель изобретения - повьшение точности позиционирования.
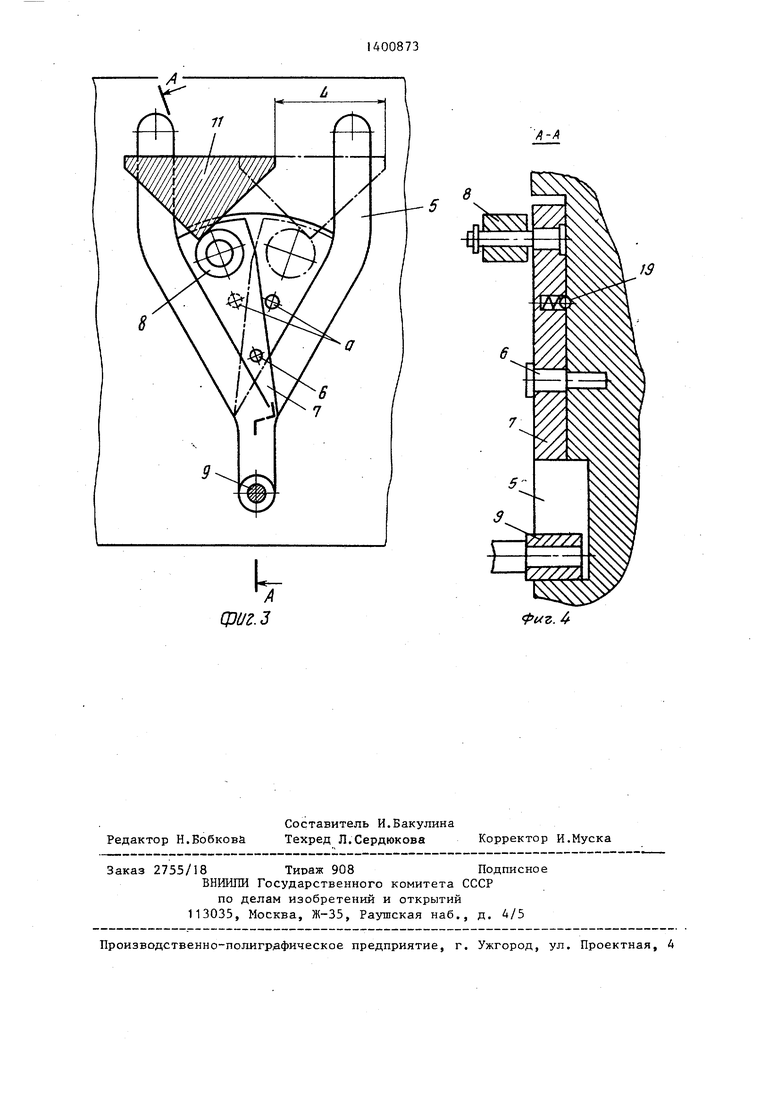
На фиг.1 изображен манипулятор, общий вид; на фиг.2 - то же, при пе реключении планки; на фиг.З - развертка..подвижной гильзы с кулачком; на фиг;4 - разрез А-А на фиг.З.
Манипулятор содержит корпус 1, на котором закреплен шток 2 привода ли- нейного перемещения, например, гид- роцилиндра 3, корпус которого связан с подвижной гильзой 4, имеющей на наружной поверхности копирный паз 5. На ось 6, закрепленную в выемке на нарузкной поверхности подвижной гильзы 4, посажена планка 7 с возможностью ее поворота на оси 6 относительно подвижной гильзы. На планке 7 установлен ролик 8, выступающий на ее поверхности. В копирном пазу 5, глубина которого больше чем толщина поворотной планки 7 (фиг.4), расположе копирньй ролик 9, закрепленный на корпусе 1 и образующий с копирным па зон 5 копирную пару. На корпусе 1 посредством оси 10 установлено с возможностью поворота коромысло 11, выполненное в виде трехплечего рычага, на одном плече которого закреплен кулачок 12 с двумя рабочими профилями. Кулачок 12 вместе с коромыслом 1 имеет возможность занимать две позиции (вправо или плево от оси манипулятора) . Для фиксации этих позиций предусмотрены закрепленные на корпусе 1 упоры-штыри 13 и 14. На подвижной гильзе 4 закреплены дополнительные упоры 15 и 16, предназначенные для взаимодействия через плечи 17 и 18 коромысла II с размещенным на нем кулачком 12.
Для фиксации на рабочих позициях поворотной планки 7, взаимодействующей с кулачком 12, предусмотрен шариковый фиксатор 19 и гнезда а (фиг.3) на подвижной гильзе 4. На последней закреплена механическая рука 20, снабженная схватом 21. Накопитель 22 деталей снабжен подъемником 23, служащим для выдачи деталей 24 в зону действия схвата 21.
Для крепления детали 24 при ее обработке на станке предусмотрено расположенное на его столе 25 зажимное приспособление 26.
Манипулятор работает следующим образом.
Перед началом работы плечо 17 коромысла 11 прижато дополнительным упором 15, закрепленным на подвижной гильзе 4, которая в данный момент находится внизу, к упору-штырю 13, .а кулачок 12, расположенный на коромысле 1 1 , занимает правое положение. Механическая рука 20 с раскрытым схватом 21.находится над накопителем 22 (фиг.1, обозначено пунктиром), а верхняя часть правого канала копирно- го паза 5 контактирует с роликом 9. П.ри получении команды на начало работы подъемник 23 перемещается вверх, . поднимая стопу деталей 24 до тех пор, пока верхняя деталь 24 не окажется в зоне действия схвата 21. Рычаги схвата 21 сходятся к центру, захватывая
10
15
20
деталь 24. Через польш неподвижный шток 2 рабочая среда поступает в верхнюю полость гидроцилнндра 3, который начинает перемещаться вверх вместе со связанной с ним гильзой 4.
При. этом неподвижный копирный ролик 9, находясь в копирном пазу 5 подвижной гильзы 4, обеспечивает необходимую траекторию движения механической руки 20 со схватом 21 следующим образом. Благодаря тому, что ролик 9 в самом начале движения гильзы .4 контактирует с верхней частью гильзы 4 через вертикальный участок паза 5, происходит вертикальное перемещение вверх схвата 21 с деталью 24. При дальнейшем подъеме гильзы 4 винтовой участок паза 5 набегает на копирный ролик 9, и происходит поворот . гильзы 4 вместе с рукой 20, схватом 21 и деталью 24 на половину полного угла поворота. После осуществления полного подъема гильзы 4 копирный ролик 9 взаимодействует с нижним вер- 25 тикальным участком паза 5, в результате чего подъем гильзы 4 заканчивается без поворота. Выступающий на поверхности планки 7 ролик 8 упирается в левую рабочую профильную поверх- зо ность кулачка 12 и,: преодолевая усилие пружины шарикового фиксатора 19, поворачивает планку 7, посаженную на ось 6, закрепленную в выемке на наружной поверхности гильзы 4, против часовой стрелкиа открывая тем самым левый канал копирного паза 5. При окончании поворота .планки 7 ее нижний конец упирается в правую боковую поверхность паза 5, а шариковый фиксатор 19 попадает в левое гнездо а на гильзе 4 и фиксирует планку 7 в этом положении (фиг.З).
После команды на опускание гидроцилиндра 3 рабочая.среда подается в его нижнюю полость, гидроцилиндр 3 начинает перемещаться вниз вместе с гильзой 4. При ее опускании левая боковая поверхность планки 7 взаимодейРдновременно с поворотом гильзы 4 поворачивается закрепленньв на ней упор 16 и располагается над плечом 18 коромысла 11, В связи с тем, что при дальней1ием передвижение гильзы 4 вниз неподвижный ролик 9 взаимодействует с верхним вертикальным участком правого канала паза 5, опускание гшть- зы 4 происходит без ее поворота. По окончании опускания гильзы 4 с механической рукой 20 зажатая схватом 21 деталь 24, ось которой совмещена с осью зажимного приспособления 26, устанавливается в его посадочное место. Схват 21 раскрывается, деталь 24 зажимается в приспособлении 26. Одновременно с этим дополнительный упор 16 нажимает на плечо 18 коромысла 11, последнее поворачивается на оси 10, при этом дополнительный упор 16 прижимает плечо 18 к упору-штырю 14, что вызывает перевод расположенного на коромысла 11 кулачка 12 в левое положение на величину L,,OT его первоначального правого положения.
При повторном подъеме гидроцилиндра 3 с гильзой 4 движение механической руки 20 происходит по той же траектории, что и при ходе гидроцилиндра 3 вниз, но в обратной последовательности. При этом ролик 8 упирается в правую рабочую поверхность кулачка 12 и, преодолевая усилие 35 пружины фиксатора 19, поворачивает планку 7 по часовой стрелке, открывая правый канал копирного паза 5, обеспечивая тем самым при ходе гидроцилиндра 3 вниз возврат гильзы 4 с механической рукой 20 в исходное положение,
Таким образом, кулачок 12 переключает поворотную планку 7, открывая
40
45
тот или иной канал паза 5 в зависимости от того, на какой позиции установлен кулачок 12. Вывод кулачка 12 на нужную позицию производится . благодаря наличию упоров 15 и 16, ствует с неподвижным роликом 9, в ре до Расположенных на подвижной гильзе 4, зультате чего происходит поворот при ее перемещении вниз, при котором гипьзы 4 в направлении зажимного при- гильза -4 попутно перебрасывает кула- способления 26, при этом ролик 9 чок 12, который при дальнейшем пере- взаимодействует с левым винтовым ка- движении гильзы 4 вверх переключает налом паза 5, в результате чего гиль- gr- поворотную планку 7 с одного канала за 4 поворачивается до совмещения паза 5 на другой, обеспечивая необхо- оси детали 24, зажатой схватом 21 ру- димую траекторию движения механически 20, с осью зажимного приспособле- кой руки 20 без каких-либо дополни- ния 26, расположенного на столе 25. тельных механизмов.
Рдновременно с поворотом гильзы 4 поворачивается закрепленньв на ней упор 16 и располагается над плечом 18 коромысла 11, В связи с тем, что при дальней1ием передвижение гильзы 4 вниз неподвижный ролик 9 взаимодействует с верхним вертикальным участком правого канала паза 5, опускание гшть- зы 4 происходит без ее поворота. По окончании опускания гильзы 4 с механической рукой 20 зажатая схватом 21 деталь 24, ось которой совмещена с осью зажимного приспособления 26, устанавливается в его посадочное место. Схват 21 раскрывается, деталь 24 зажимается в приспособлении 26. Одновременно с этим дополнительный упор 16 нажимает на плечо 18 коромысла 11, последнее поворачивается на оси 10, при этом дополнительный упор 16 прижимает плечо 18 к упору-штырю 14, что вызывает перевод расположенного на коромысла 11 кулачка 12 в левое положение на величину L,,OT его первоначального правого положения.
При повторном подъеме гидроцилиндра 3 с гильзой 4 движение механической руки 20 происходит по той же траектории, что и при ходе гидроцилиндра 3 вниз, но в обратной последовательности. При этом ролик 8 упирается в правую рабочую поверхность кулачка 12 и, преодолевая усилие пружины фиксатора 19, поворачивает планку 7 по часовой стрелке, открывая правый канал копирного паза 5, обеспечивая тем самым при ходе гидроцилиндра 3 вниз возврат гильзы 4 с механической рукой 20 в исходное положение,
Таким образом, кулачок 12 переключает поворотную планку 7, открывая
45
до gr-
/J-A
. -4
| Манипулятор | 1983 |
|
SU1110626A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
