1283090
захвата обеспечивается за счет использования магнитного фиксатора, состоящего из диска 13, сердечников 11 и обмоток. При этом не сложно регулировать усилие зажима заготовки, изменяя электромагнитные параметры системы. Кроме того, возможно также
и н м вр п г
1
Изобретение относится к машинйст- рренгао, в частности к захватным устройствам промышленных роботов.
Целью изобретения является расширение технологических возможностей и пов1 ш1ение надежности работы устройства
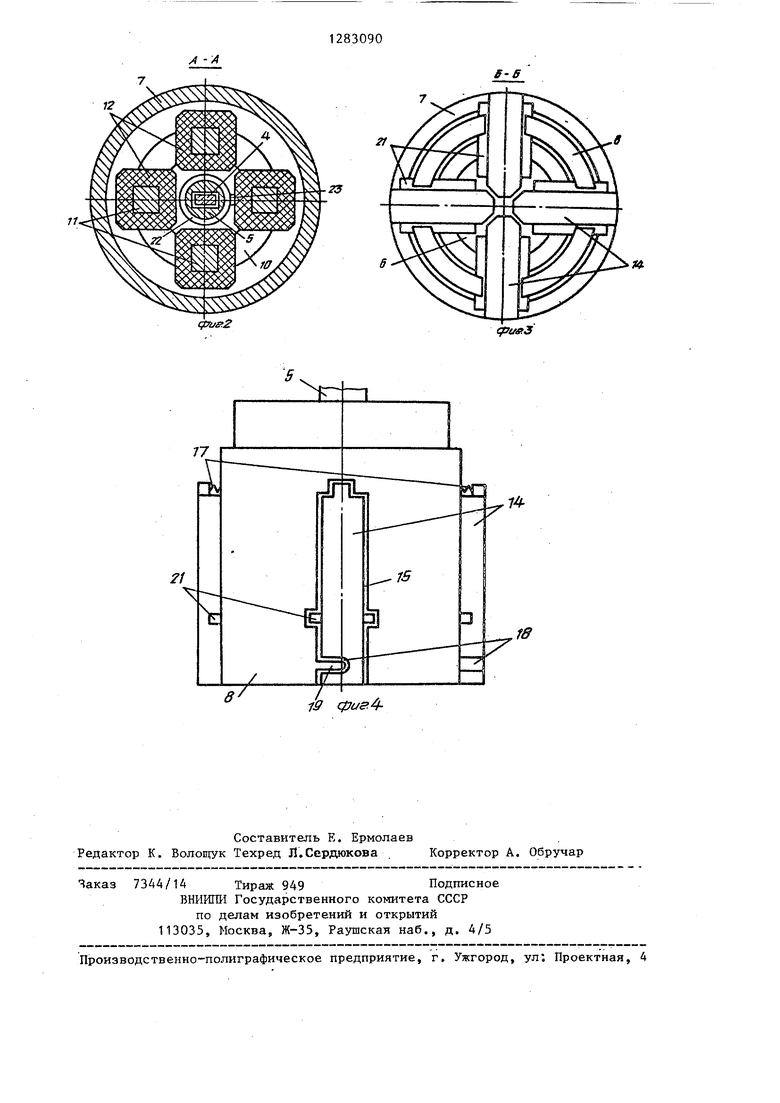
На фиг. 1 изображен схват, продольный разрез; на фиг. 2 - сечение А-А на фиг. 1; на фиг, 3 - сечение Б-Б на фиг. 1; на фиг. 4 - губки схвата.
Схват манипулятора (фиг. 1) содержит привод 1, приводной вал 2, установленный в подшипниках 3 и состоящий из двух частей 4 и 5, соеди- ненньга: телескопически. На приводном валу крепится приводной элемент 6, выполненный в виде конуса с резьбой Основание 7 и корпус 8 схвата имеют цршиндрическую форму и выполнены из немагнитного материала, причем корпус 8 имеет меньший диаметр и установлен в основании 7 в подшипнике 9. В основании 7 установлена (фиг. 1 и 2) электромагнитная система фиксатора, представляющая собой жестко закрепленный в корпусе кол цевой магнитопровод 10 и прикрепленные к магнитопроводу 10 сердечники 11с раздвоенными полюсами, имеюище обмотки 12. Количество сердечников может быть только четньш и выбрано, например, равным четьфем, В зазоре раздвоенных полюсов находится стальной диск 13 фиксатора, жестко прикрепленный к корпусу 8. Захватные губки 14 (число губок может быть, например, равным четырем, при этом губки на фиг. 1 не рассечены) схвата имеют резьбу на внутренней наклонной грани и расположены в фигурных пазах 15 корпуса 8 (фиг. 4).
использование схвата для осуществле- ния вращения заготовки в нем. Это реализуется с помощью тех же электромагнитных параметров системы.Причем, вращение заготовки всхвате можноис-- пользовать длядополнительных техноло- гичэских операций. 1 з.п.ф-лы, 4 ил.
5 0 5 0
5
Каждая губка 14 (фиг. 1) подпружинена упругими элементами 16 и 17, которые удерживают ее в постоянном зацеплении с приводным элементом 6. Первый упругий элемент 16 находится в нижней части губки 14 в пазе 18 и прикреплен одним концом к губке 14, а вторым - к выступу 19 фигурного паза 15 корпуса 8. Второй упругий элемент 17 крепится одним концом к корпусу 8, а вторым - к выступу 20 в верхней части губки 14. Каждая губка 14 имеет направляющие выступы 21 (фиг. 3 и 4), имеюпще прямоугольную форму и находящиеся в такой же формы пазах корпуса 8, что позволяет губкам 14 двигаться только параллельно себе в радиальном направлении. На подвижной части 5 (фиг. 1) телескопического вала 2 жестко закреплена шайба 22, предназначенная для воздействия на конечные выключатели 23, которые служат для ограничения вертикального хода приводного элемента 6.
Устройство работает следующим образом.
В исходном положении приводной элемент 6 находится в своем крайнем верхнем положении, губки схвата 14 втянуты в головку упругими элементами 16 и 17 (фиг. 1), обмотки 12 электромагнитной системы фиксатора отключены от источника питания, привод 1 не вращается. При захвате схват подводится к детали, на обмотки 12 подается питание от внешнего источника питания (не показан) и привод 1 начинает вращаться. Получив питание, обмотки 12 создают магнитные потоки, каждый из которых замыкается по контуру: сердечник с раздвоенным noJmcoM 11 - стальной диск
31
13 - смежньш сердечник 11 с полюсом противоположной полярности - кольцевой магнитопровод 10 - исходный сердечник 1 1 . Магнитный поток, замыкаясь через стальной диск 13, наво- дит в диске 13 вихревые токи, которые, взаимодействуя с магнитным по
лем, создают тормозной момент. Величина тормозного момента зависит от величины подводимого к обмоткам 12 напряжения (тока). Этот тормозной момент препятствует вращению корпуса 8 в подшипнике 9. Привод 1 вращает приводной элемент 6 через вал 2, Приводной элемент 6, вращаясь, ввинчивается в губки 1/4 и тем самым выдвигает их, преодолевая усилия упругих элементов 16 и 17. Движение вниз приводного элемента 6 обеспечивается телескопической связью частей вала 4 и 5. При этом часть 5 выдвигается из части 4.
При достижении губками 14 внутренней поверхности детали силой вращения приводного вала 2 преодолевается тормозной момент фиксатора и корпус 8 с зажатой деталью начинает вращаться. Это вращение может быть использовано при обработке детали. Сжимающее усилие губок 14 определяется величиной тормозного момента. Таким образом, регулируя напряжение на электромагнитной системе фиксатора, можно обеспечить регулирование сжимающего усилия. При вращении привода 1 в другую сторону происходит отпускание детали за счет того, что корпус 8 удерживается от вращения фиксатором, а приводной элемент 6 вьтинчивается из губок 14. Упругие элементы 16 и 17 при этом втягивают губки 14 в корпус 8, освобождая деталь. При достижении приводным элементом 6 своего крайнего верхнего положения шайба 22 воздействует на , верхний конечный выключатель 23, который отключает привод 1. Схват в этом случае находится в исходном состоянии. Если детали нет в зоне действия схвата, приводной элемент 6 достигает своего крайнего нижнего положения и под воздействием щай- бы 22 срабатьшает нижний конечный выключатель 23.
Формула изобретения
1. Схват манипулятора, содержащий основание, в котором с возможностью вращения и фиксации расположен корпус с размещенными в нем губками с приводом, включающим в себя вал, связанный с двигателем и меха- низмом перемещения губок, а также систему управления с конечными выключателями, отличающийся. тем, что, с целью расширения технологических возможностей и повышения надежности, фиксатор выполнен в виде стального диска, жестко закрепленного в корпусе, и четного числа сердечников, установленных в основании и снабженных обмотками, связанными с системой управления, причем сердечники с одной стороны соединены между собой кольцевым магнитопро- водом, .а с другой вьтолнены с паза- . ми, в которых с зазором размещен стальной диск.
2. Схват по п. 1, отличающийся тем, что механизм перемещения губок выполнен в виде конуса с винтовой нарезкой, входящей в зацепление с соответствующей нарезкой, выполненной на губках, размещенных в направляющих корпуса, при этом приводной вал вьтолнен телескопическим, а его подвижная в осевом направлении часть жестко связана с конусом и вьшолнена с элементами, предназначенными для взаимодействия с конечными выключателями.
12
qous;2
Б-б
фиеЗ
13 фс/е
74

| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Автомат для изготовления из проволоки деталей типа штырей | 1981 |
|
SU1042860A1 |
| Схват манипулятора | 1982 |
|
SU1061988A1 |
| Захватное устройство | 1984 |
|
SU1237418A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Исполнительный орган промышленного робота | 1977 |
|
SU738867A1 |
| Станок для заплетки канатов | 1976 |
|
SU614144A1 |
| СХВАТ МАНИПУЛЯТОРА | 2008 |
|
RU2381892C1 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
Схват манипулятора может применяться в любой отрасли промыпшен- ности для загрузки материалообраба- тьшающего оборудования штучными заготовками. Цель изобретения - повышение надежности захвата заготовки, а также расширение технологических возможностей устройства. Надежность 22 (Л Cpus./
Составитель R. Ермолаев Редактор К. Волощук Техред Л.Сердюкова . Корректор А, Обручар
Чаказ 7344/14 Тираж 949Подписное
ВНИРШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул; Проектная, 4
| Схват манипулятора | 1982 |
|
SU1076279A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
