Изобретение относится к машиностроению, а именно к механизмам автоматического обеспечения равенства оборотов ведущего и ведомого вало и плавного осуществления реверса, и найдет применение, в частности, в приводных однооборотных механизмах автоматических регуляторов.
Цель изобретения - повышение точности механизма за счет автоматичес- кого поддержания равенства оборотов ведущего и ведомого валов и повышение его надежности за счет обязательной остановки ведомого вала перед реверсом, что снижает динамические нагрузки в механизме,
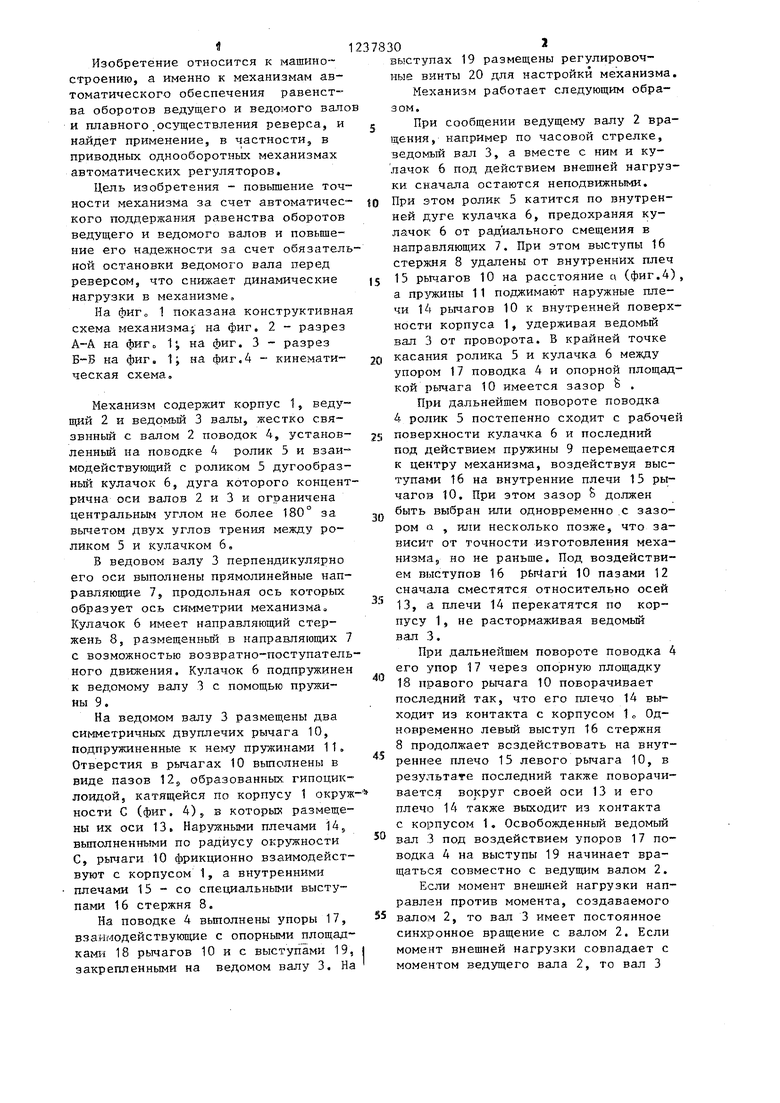
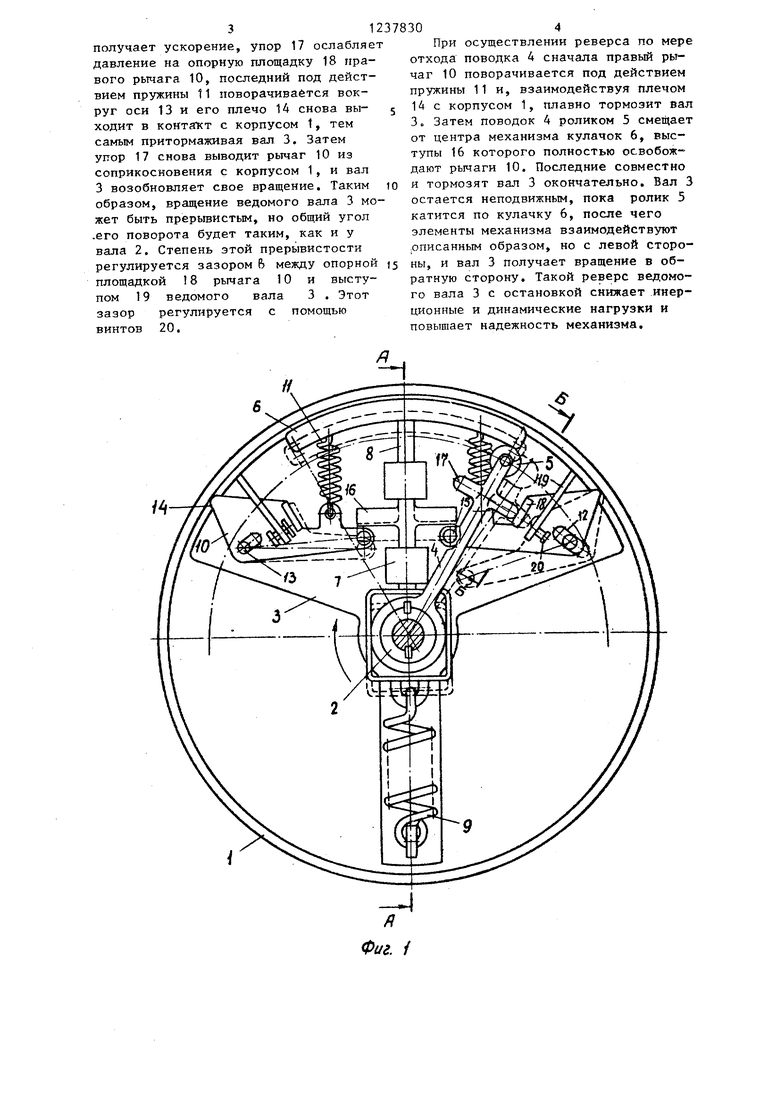
На фиг о 1 показана конструктивная схема механизма. на фиг, 2 - разрез А-А на фиг о 1, на фиг. 3 - разрез Б-Б на фиг, 1; на фиг.4 - кинемати- ческая схема.
Механизм содержит корпус 1, ведущий 2 и ведомый 3 валы, жестко свя- звнный с валом 2 поводок 4, установ- ленный на поводке 4 ролик 5 и взаи модействующий с роликом 5 дугообразный кулачок 6, дуга которого концент рична оси валов 2 и 3 и ограничена центральным углом не более 180° за вьгаетом двух углов трения между роликом 5 и кулачком 6,
В ведовом валу 3 перпендикулярно его оси выполнены прямолинейные направляющие 7, продольная ось которых образует ось симметрии механизма. Кулачок 6 имеет направляющий стержень 8, размещенный в направляющих 7 с возможностью возвратно-поступательного движения. Кулачок 6 подпружинен к ведомому валу 3 с помощьЮ пружины 9.
На ведомом валу 3 размещены два симметричных двуплечих рычага 10, подпружиненные к нему пружинами 11, Отверстия в рычагах 10 выполнены в виде пазов 12s образованных; гипоциклоидой, катящейся по корпусу 1 окруж ности С (фиг. 4)5 в которьк размещены их оси 13. Наружными плечами 14, выполненными по радиусу окружности С, рычаги 10 фрикционно взаимодействуют с корпусом 1, а внутренними плечами 15 - со специальньпчи выступами 16 стержня 8.
На поводке 4 выполнены упоры 17, взаимодействующие с опорньми площадками 18 рычагов 10 и с выступами 19, закрепленными на ведомом валу 3. На
ов
1237830
выступах 19 размещены регулировоч
5
0
i
5
0
5
0
5
0
ные винты 20 для настройки механизма.
Механизм работает следующим образом.
При сообщении ведущему валу 2 вращения, например по часовой стрелке, ведомый вал 3, а вместе с ним и кулачок 6 под действием внешней нагрузки си:ачала остаются неподвижными. При этом ролик 5 катится по внутренней дуге кулачка 6, предохраняя кулачок 6 от радиального смещения в направляющих 7. При этом выступы 16 стерлсня 8 удалены от внутренних плеч 15 рычагов 10 на расстояние а (фиг.4), а пр;1 Ж -1ны 11 поджимают наружные плечи 14 рычагов 10 к внутренней поверхности корпуса 1, удерживая ведомый вал 3 от проворота. В крайней точке касания ролика 5 и кулачка 6 между упором 17 поводка 4 и опорной площадкой рычага 10 имеется зазор fe .
При дальнейшем повороте поводка 4 ролик 5 постепенно сходит с рабочее поверхности кулачка 6 и последний под действием пружины 9 перемещается к центру механизма, воздействуя выступами 16 на внутренние плечи 15 рычагов 10. При этом зазор 6 должен быть выбран или одновременно с зазором п , или несколько позже, что зависит от точности изготовления механизма, но не раньше. Под воздействием выступов 16 рычаги 10 пазами 12 снач;1ла сместятся относительно осей 13, а плечи 14 перекатятся по корпусу 1, не растормаживая ведомьй вал 3.
При дальнейшем повороте поводка 4 его упор 17 через опорную площадку 18 правого рычага 10 поворачивает последний так, что его плечо 14 выходит из контакта с корпусом 1 Одновременно левый выступ 16 стержня 8 продолжает воздействовать на внутреннее плечо 15 левого рычага 10, в результате последний также поворачивается вокруг своей оси 13 и его плечо 14 также выходит из контакта с корпусом 1, Освобожденньт ведомый вал 3 под воздействием упоров 17 поводка 4 на выступы 19 начинает вращаться совместно с ведущим валом 2.
Если момент внешней нагрузки направлен против момента, создаваемого валом 2, то вал 3 имеет постоянное синхронное вращение с валом 2. Если момент внешней нагрузки совпадает с моментом ведущего вала 2, то вал 3
получает ускорение, упор 17 ослабляет давление на опорную площадку 18 правого рычага 10, последний под действием пружины 11 поворачивается вокруг оси 13 и его плечо 14 снова вы- ходит в контахт с корпусом 1, тем самым притормаживая вал 3. Затем упор 17 снова выводит рычаг 10 из соприкосновения с корпусом 1, и вал 3 возобновляет свое вращение. Таким образом, вращение ведомого вала 3 может быть прерьшистым, но общий угол .его поворота будет таким, как и у вала 2. Степень этой прерывистости регулируется зазором В между опорной площадкой 18 рычага 10 и выступом 19 ведомого вала 3 . Этот зазор регулируется с помощью винтов 20.
При осуществлении реверса по мере отхода поводка 4 сначала правый рычаг 10 поворачивается под действием пружины 11 и, взаимодействуя плечом 14 с корпусом 1, плавно тормозит вал 3« Затем поводок 4 роликом 5 смещает от центра механизма кулачок 6, выступы 16 которого полностью освобождают рычаги 10. Последние совместно и тормозят вал 3 окончательно. Вал 3 остается неподвижным, пока ролик 5 катится по кулачку 6, после чего элементы механизма взаимодействуют .описанным образом, но с левой стороны, и вал 3 получает вращение в обратную сторону. Такой реверс ведомого вала 3 с остановкой снижает инерционные и динамические нагрузки и повышает надежность механизма.
/4
А-А
11
17
Ч ггА
фиё2
б-б
го
18
0
фие.Ъ
.
| название | год | авторы | номер документа |
|---|---|---|---|
| Прививочное устройство | 1978 |
|
SU843850A1 |
| Сверлильно-резьбонарезной полуавтомат | 1983 |
|
SU1098700A1 |
| Боевой механизм ткацкого станка | 1978 |
|
SU917703A3 |
| Устройство для изготовления проволочных штырей и запрессовки их в изделие | 1988 |
|
SU1593879A2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Станок для продораживания коллекторов электрических машин | 1974 |
|
SU555477A1 |
| Гайковерт ударно-вращательногодЕйСТВия | 1979 |
|
SU848337A1 |
| Токарный полуавтомат | 1988 |
|
SU1565588A1 |
| Муфта-тормоз (ее варианты) | 1981 |
|
SU1070354A1 |
| Автомат для навивки пружин | 1980 |
|
SU895576A1 |
Редактор Т.Митейко
Составитель В.Савицкий
Техред 0„Гортвай Корректор Е.Сирохман
3271/37
Тираж 880Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35,, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Кожевников С.Н | |||
| Механизмы | |||
| П.: Машиностроение, 1976, с | |||
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
