2.Схват по п. 1, отличающийся тем, что половина от части лепестков, отогнутых в сторону выпуклости упругой чашеобразной пластинки, имеет крючкообразные концы, отогнутые наружу пальца, а другая - к пальцу.
3.Схват по п. 1, отличающийся тем, что упругие чашеобразные пластинки имеют разную жесткость, при этом жесткость пластинок, расположенных вблизи основания пальцев, меньше жесткости пластинок вб ли- зи концов пальцев.
1
Изобретение относится к робототехнике, и, в частности, может быть использовано в качестве разжимного захватного устройства автоматического манипулятора или автооператора.
Целью изобретения является повышение надежности ввода схвата в отверстие детали и удержания детали.
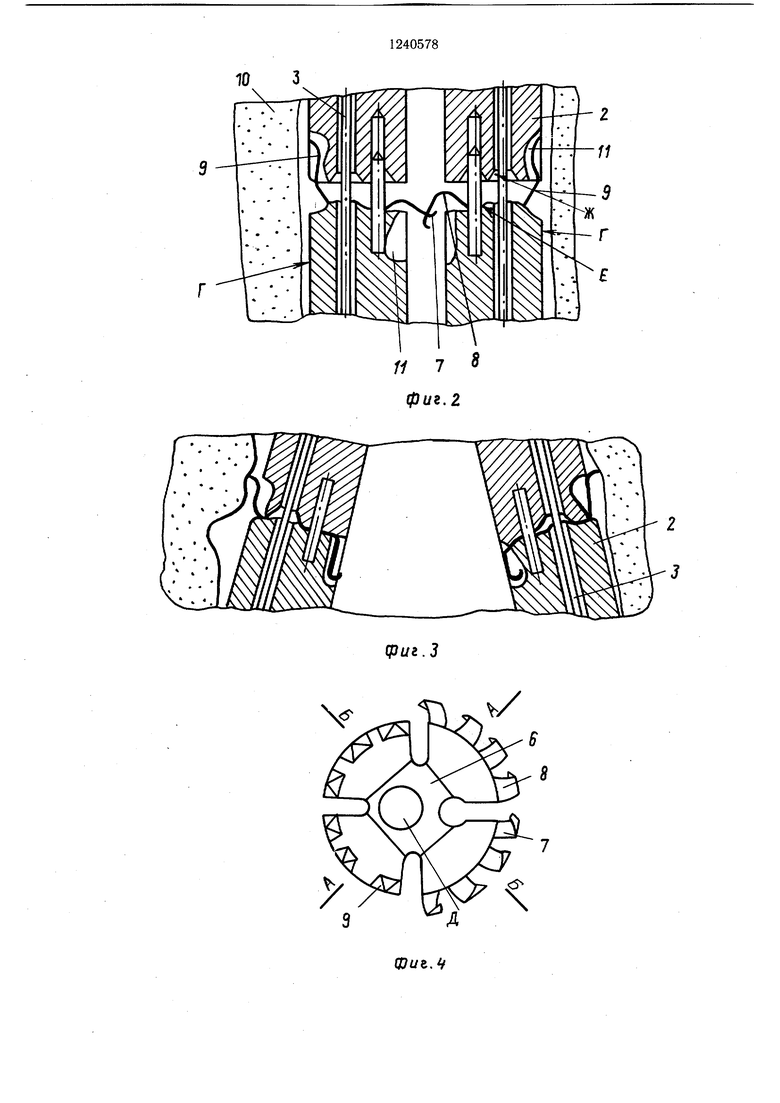
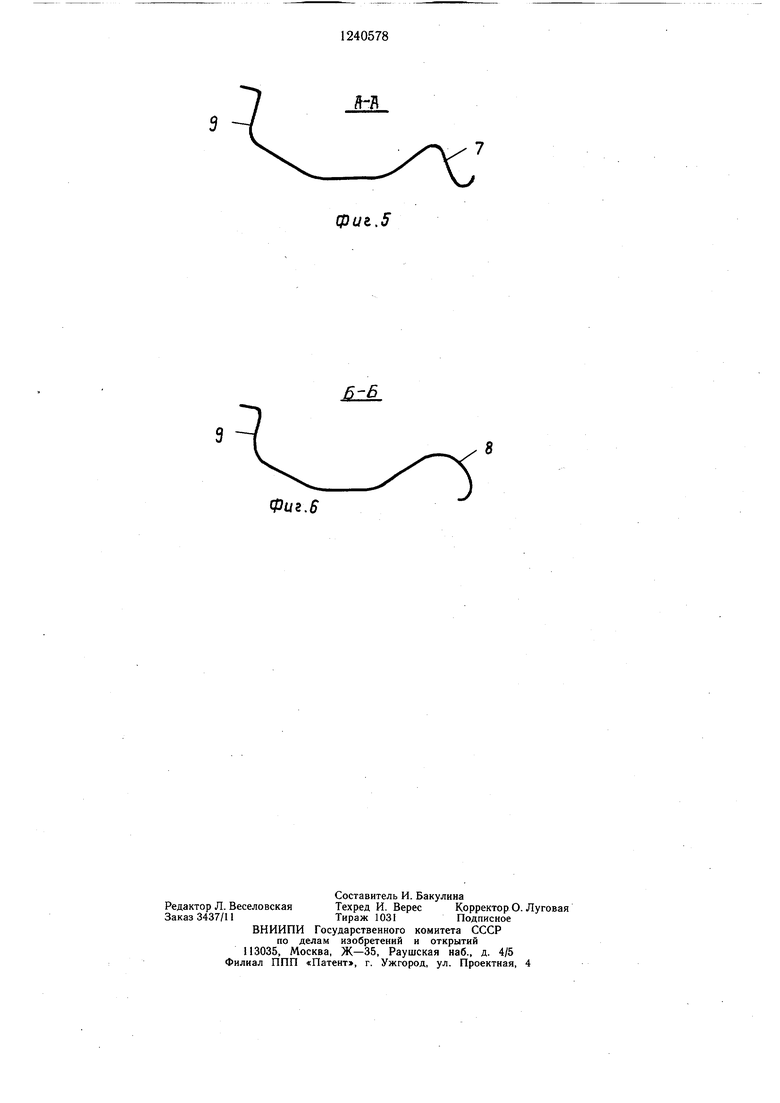
На фиг.1 изображен схват с зажатой деталью, общий вид; на фиг.2 - сопряжение звеньев соседних пальцев в момент ввода схвата в отверстие детали; на фиг.З - то же, в момент зажима; на фиг.4 - гибкая чашеобразная пластинка, вид сверху; на фиг.5 - сечение А-А на фиг.4; на фиг.6 - сечение Б-Б на фиг.4.
Схват манипулятора состоит из корпуса 1, на отклоняющие поверхности В которого опираются пальцы, состоящие из звеньев 2, выполненных в виде тел врацгения с пропущенными сквозь них гибкими тросами 3, которые закреплены одним концом на конечном звене 4, а другим концом соединены с приводом 5.
Между звеньями пальцев, а также корпусом и звеньями расположены упругие чашеобразные пластинки 6 с отогнутыми лепестками 7-9. Причем лепестки 7 и 8 имеют крючкообразные концы, направленные в разные стороны, для облегчения сцепления пальцев между собой, а лепестки 9 служат для улучшения сцепления с материалом детали 10. В недеформированном состоянии пластинки 6 (тросики 3 ослаблены) лепестки 7 и 8 выступают за наружную поверхность Г
4.Схват по п. i, отличающийся тем, что отверстия под тросик в звеньях пальцев смещены от центра звена к сторонам пальцев, обращенных наружу схвата.
5.Схват по п. 1, отличающийся тем, что на торцовых поверхностях звеньев вблизи отверстия под тросик имеется конусообразный вьютуп, а на сопрягаемой торцовой поверхности соседних звеньев имеется соответствующая этому выступу выточка.
пальца, а лепестки 9 находятся в выборках (пазах) 11 и не препятствуют скольжению боковых поверхностей Г звеньев пальцев 2 по стенкам отверстия в детали 10. Нахождение разных лепестков одной пластинки в выборках соседних звеньев пальцев обеспечивает однозначное их угловое положение между собой.
Пластины, расположенные вблизи основания пальцев, могут иметь меньшую жест0 кость для обеспечения более равномерной по длине поперечной жесткости пальца.
Отверстия Д под тросик 3 могут быть смещены к поверхности Г для снижения силы натяжения в тросиках 3 при заданном режимном усилии пальцев. На торцовых поверх5 ностях звеньев 2 может быть выполнен выступ Е и впадина Ж, которые центрируют пластину и звенья между собой и снижают поперечные срезающие нагрузки с тросика. Схват работает следующим образом.
- Пальцы схвата вводятся в отверстие детали сверху, тросики 3 в этот момент ослаблены, звенья 2 пальцев свободно свисают, и при колебаниях схвата пальцы сцепляются друг с другом выступающими крючками 7 и 8. Затем включается привод 5 и тросики
5 натягиваются, выбирается зазор между звеньями, корпусом 1, звеньями 2 и 4, при этом пластинки упруго деформируются, крючки лепестков 7 и 8 соседних пальцев расцепляются, а концы лепестков 9 выходят за боковую поверхность звеньев 2 и 4 паль0 цев, пальцы распрямляются и зажимают деталь 10.
(риг.З
V
Фи&.
/Hfl
фт.5
:±
Фиг.в
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1984 |
|
SU1237420A2 |
| Схват манипулятора | 1982 |
|
SU1033311A1 |
| Схват манипулятора | 1984 |
|
SU1202874A2 |
| Схват манипулятора | 1984 |
|
SU1202868A2 |
| Схват промышленного робота | 1987 |
|
SU1495127A1 |
| Схват манипулятора | 1984 |
|
SU1202875A2 |
| Схват манипулятора | 1985 |
|
SU1268409A2 |
| Схват манипулятора | 1985 |
|
SU1323369A1 |
| Схват | 1985 |
|
SU1284828A1 |
| МАГАЗИННОЕ ОГНЕСТРЕЛЬНОЕ ОРУЖИЕ С РУЧНЫМ ПЕРЕЗАРЯЖАНИЕМ | 2004 |
|
RU2268452C1 |

| Схват манипулятора | 1982 |
|
SU1033311A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
