с Изоб 1етение относится к робото- . технике и может быть использовано в качестве разжимного захватного устройства автоматического манипулятора или автооператора.
Целью изобретения является повышение надежности удержания детали за внутреннюю поверхность произвольной формы.
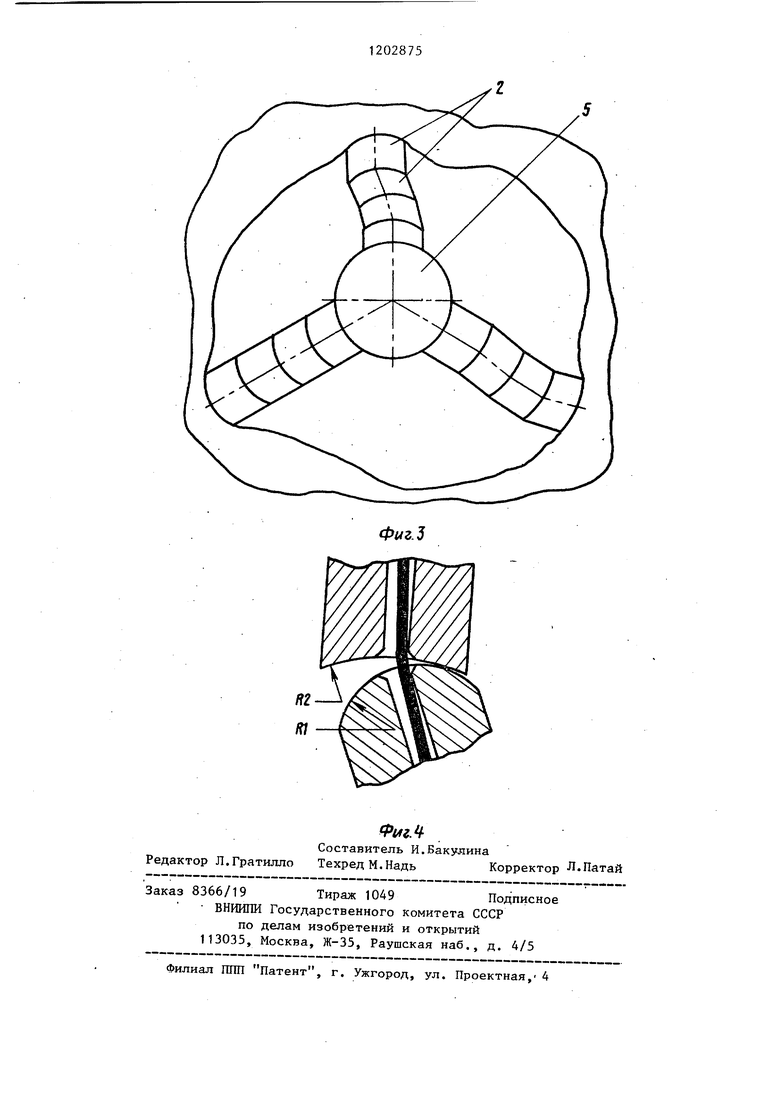
На фиг.1 изображен схват манипулятора со сведенными пальцами -на фиг.2 - то же, с разведенными пальцами; на фиг.З - то же, вид сверху на фиг.4 - сопряжение смежных звеньев при самоустановке пальца в момент захвата за отверстие неправильной формы.
Схват манипулятора состоит из корпуса 1, на опорные поверхности Л которого опираются пальцы, состоящие из звеньев 2 в виде цилиндров с пропущенными сквозь .них гибкими тросиками 3, одними концами закрепленными на конечных звеньях 4 с возможностью вращения конечных звеньев 4, которые выполнены в виде постоянных магнитов, а другими концами соединены с приводом 5.
На торцовых поверхностях звень- ев пальцев 2 выполнены криволинейные цилиндрические, поверхности, причем сопряженные криволинейные по- верхности выполнены взаимоогибаемыми, т.е. имею1 Д1ми различные радиусы кривизны R., и Ее. (фиг.4).
Устройство работает следующим об- разом.
Схват манипулятора вводится в отверстие неправильной формы сверху (фиг.1), тросики 3 в этот момент ослаблены, звенья 2 пальцев
свободно свисают, а магниты, являющиеся конечными звеньями 4 пальцев, слипаются вместе. Затем включается привод 5, тросики 3 натягиваются, в результате чего пальцы распрямляются, самоустанавливаясь в отверстии неправильной формы (фиг.2 и 3). Криволинейные цштиндрические торцовые поверхности звеньев пальцев 2 не препятствуют самоустановке, а конечные звенья 4 обкатьшаются относительно тросиков 3. В результате деталь оказывается надежно закрепленной на схвате.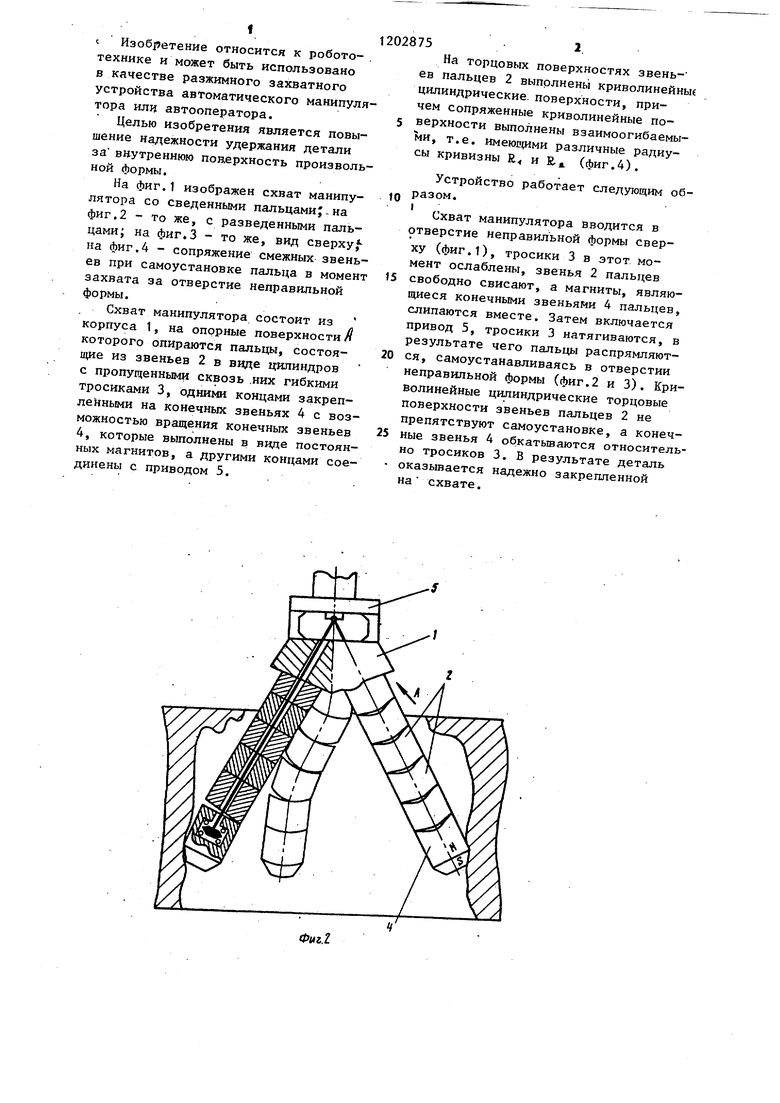
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1984 |
|
SU1202868A2 |
| Схват манипулятора | 1984 |
|
SU1202874A2 |
| Схват манипулятора | 1984 |
|
SU1237420A2 |
| Схват манипулятора | 1982 |
|
SU1033311A1 |
| Схват манипулятора | 1985 |
|
SU1240578A1 |
| Схват промышленного робота | 1987 |
|
SU1495127A1 |
| Схват манипулятора | 1985 |
|
SU1268409A2 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО | 2019 |
|
RU2762223C2 |
| Схват манипулятора | 1985 |
|
SU1323369A1 |
| Схват | 1985 |
|
SU1284828A1 |

Фиг.З
Составитель И.Бакулина Редактор Л.Гратилло Техред М.Надь Корректор Л.Патай
Заказ 8366/19 Тираж 1049 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ШШ Патент, г. Ужгород, ул. Проектная,- 4
| Схват манипулятора | 1982 |
|
SU1033311A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
