1
(21)4244832/31-08
(22)15.05.87
46) 23.07.89. Бюп. 21
(71)Карийский политехнический институт им. A.t .Горького
(72)С.Н.Медведев, А.Р.Ротт, П.Н.Чайкин и Н.П.Ефремов
(53) 62.229.72 (088.8) (56) Авторское свидетельство СССР Р 1202875, кл. В 25 J 15/00, 1984.
Авторское свидетельство СССР 1033311, кл. в 25 J 15/00, 1982.
М
(54) СХВАТ ПРОМЬШШЕННОГО РОБОТА
(57) Изобретение относится к робото-- технике и может быть использовано в манипуляторах. Целью изобретения яв- ляется обеспечение надежного захвата изделия за счет достижения ориентированного положения каждого звена относительно поверхности изделия. Охват с промьппленного робота состоит из корпуса I, пальцев, имеющих звенья 2, через которые пропущены трубки 3 с
npuSodjj
1
g
(Л
со ел
to
31495127
буртиками, выполненные из гибкого материала. Внутри трубки проиуцен тросик 4, одним концом закрепленньй в последнем звене 5, а другим связанньш , с приводом 6. При введении схвата в отверстие детали звенья 2 пальцев свисают, тросик 4 ослаблен, а относительная сробода звеньев обеспечивается трубками 3 с буртиками, на которых повисают звенья за счет большего расстояния между буртиками трубы в сравнении с высотой звеньев. При включении привода 6 звенья каждого пальца стят иваются тросиками до упора в поверхность корпуса 1. Таким образом происходит зажим детали. 6 ил.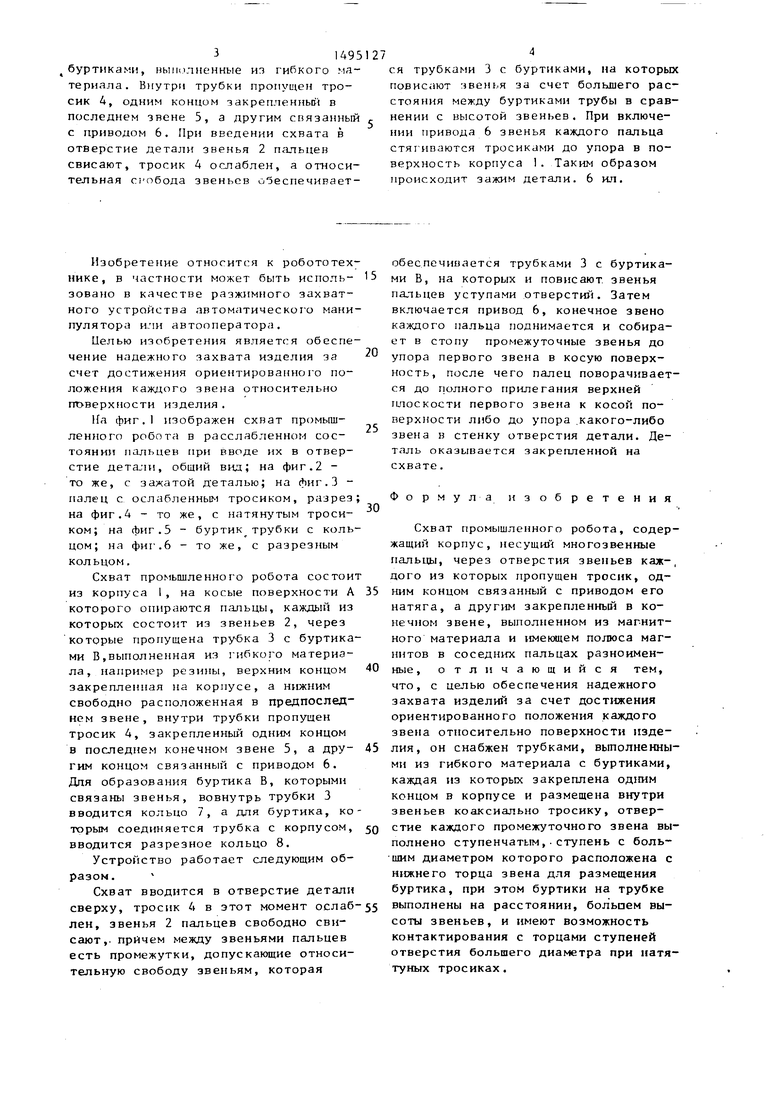
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1985 |
|
SU1268409A2 |
| Схват манипулятора | 1982 |
|
SU1033311A1 |
| Схват манипулятора | 1984 |
|
SU1237420A2 |
| Схват манипулятора | 1984 |
|
SU1202875A2 |
| Схват манипулятора | 1985 |
|
SU1240578A1 |
| Схват манипулятора | 1984 |
|
SU1202874A2 |
| Схват манипулятора | 1984 |
|
SU1202868A2 |
| Схват манипулятора | 1985 |
|
SU1323369A1 |
| Рука тензорного манипулятора | 1983 |
|
SU1114545A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
Изобретение относится к робототехнике и может быть использовано в манипуляторах. Целью изобретения является обеспечение надежного захвата изделия за счет достижения ориентированного положения каждого звена относительно поверхности изделия. Схват промышленного робота состоит из корпуса 1, пальцев, имеющих звенья 2, через которые пропущены трубки 3 с буртиками, выполненные из гибкого материала. Внутри трубки пропущен тросик 4, одним концом закрепленный в последнем звене 5, а другим связанный с приводом 6. При введении схвата в отверстие детали звенья 2 пальцев свисают, тросик 4 ослаблен, а относительная свобода звеньев обеспечивается трубками 3 с буртиками, на которых повисают звенья за счет большего расстояния между буртиками трубы в сравнении с высотой звеньев. При включении привода 6 звенья каждого пальца стягиваются тросиками до упора в поверхность корпуса 1. Таким образом происходит зажим детали. 6 ил.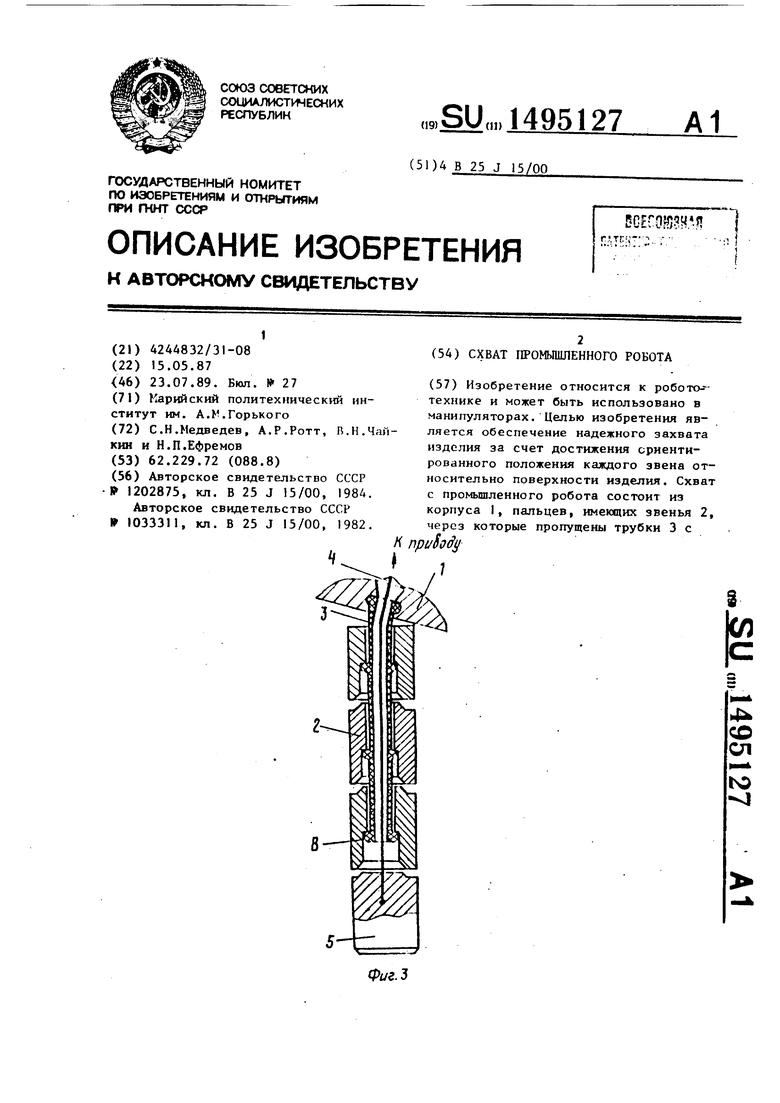
Изобретение относится к робототехнике, в частности может быть исполь- зовано в качестве разжимного захватного устройства автоматического манипулятора или автооператора.
Палью изобретения является обеспечение надежного захвата изделия за счет достижения ориентированного положения каждого звена относительно пт верхности изделия .
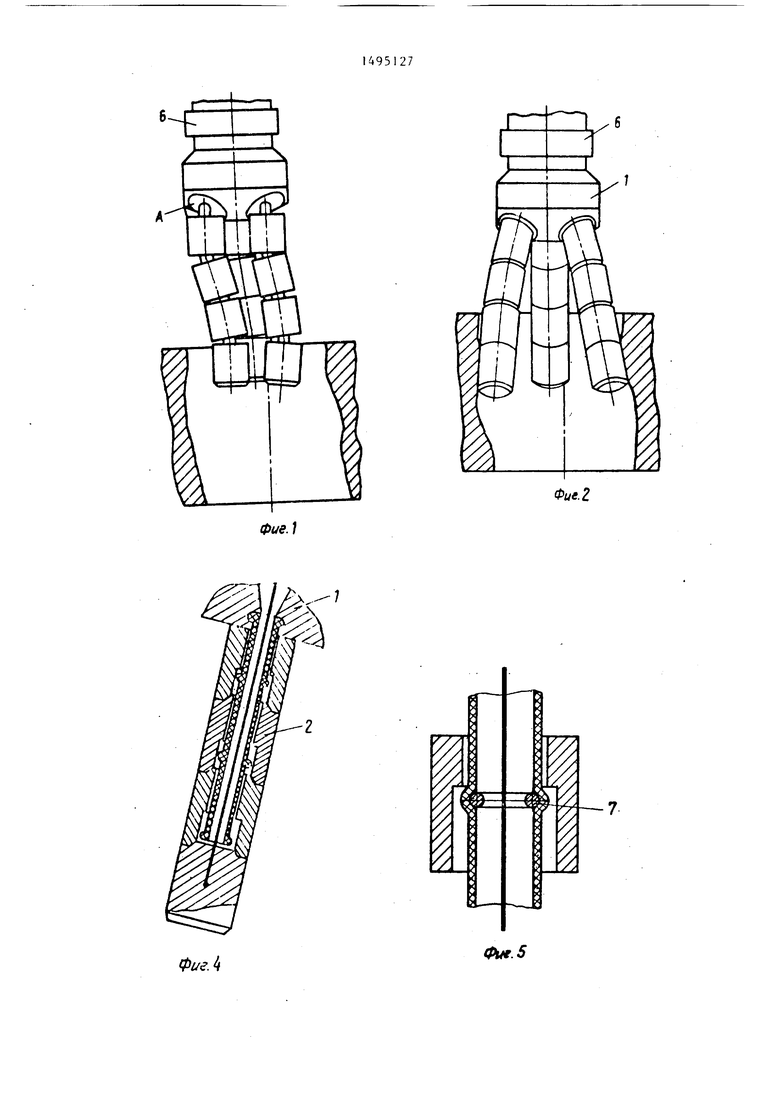
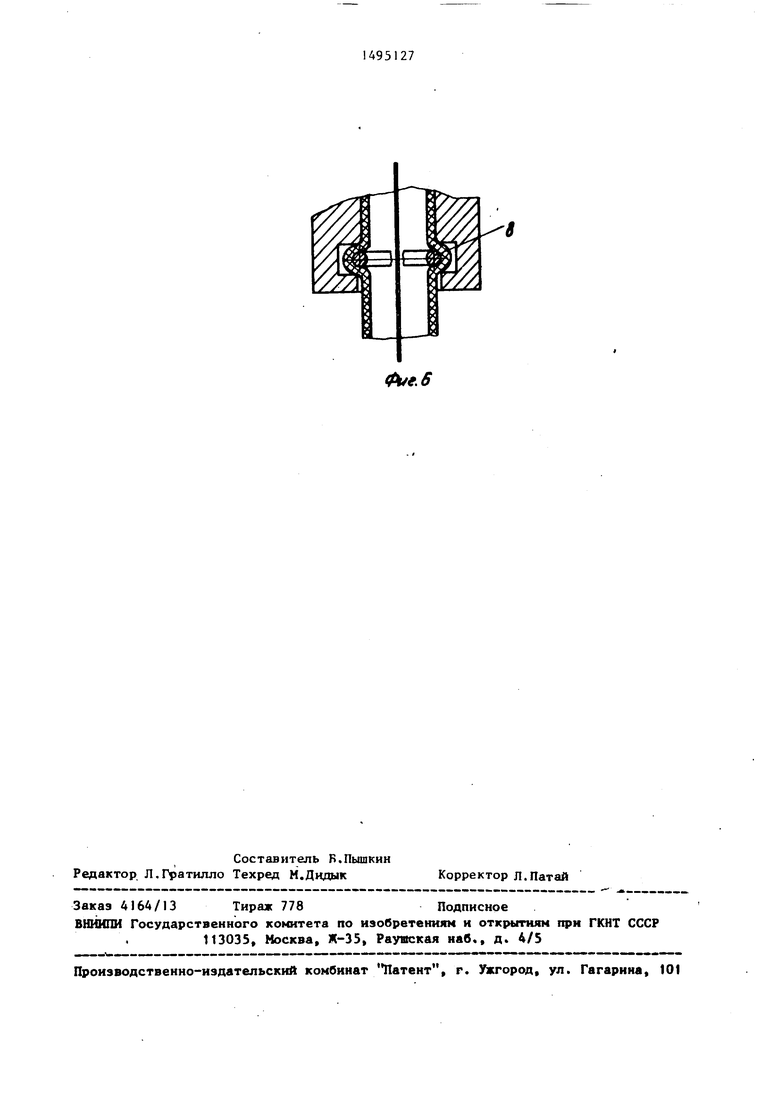
Ifa фиг. I изображен схват промышленного робота в расслабленном состоянии пальцев при вводе их в отверстие детали, общий вид; на фиг.2 - то же, с зажатой деталью; на фиг.З - палец с ослабленным тросиком, разрез на фиг.4 - то же, с натянутым тросиком; на фиг.З - буртик трубки с кольцом; на фиг.6 - то же, с разрезным кольцом.
Схват промышленного робота состои из корпуса I, на косые поверхности А которого опираются пальцы, каждый из которых состоит из звеньев 2, через которые пропущена трубка 3 с буртиками В,выполненная из гибкого материала, например резины, верхним концом закрепленная на корпусе, а нижним свободно расположенная в предпослеД нем звене, внутри трубки пропущен тросик 4, закрепленньш одним концом в последнем конечном звене 5, а дру- РИМ концом связанный с приводом 6. Для образования буртика В, которыми связаны звенья, вовнутрь трубки 3 вводится кольцо 7, а для буртика, которым соединяется трубка с корпусом, вводится разрезное кольцо 8.
Устройство работает следующим образом.
Схват вводится в отверстие детали сверху, тросик 4 в этот момент ослаб лен, звенья 2 пальцев свободно свисают,, причем между звеньями пальцев есть промежутки, допускающие относительную свободу звеньям, которая
0
5
0
5
5 5 0
5
0
обеспечивается трубками 3 с буртиками В, на которых и повисают, звенья пальцев уступами отверстий. Затем включается привод 6, конечное звено каждого пальца поднимается и собирает в стопу промежуточные звенья до упора первого звена в косую поверхность, после чего палец поворачивается до полного прилегания верхней плоскости первого звена к косой поверхности либо до упора .какого-либо звена в стенку отверстия детали. Деталь оказывается закрепленной на схвате.
Формула изобретения
Схват промышленного робота, содержащий корпус, несущий многозвенные пальцы, через отверстия звеньев каж-, дого из которых пропущен тросик, одним концом связанный с приводом его натяга, а другим закрепленньй в конечном звене, выполненном из магнитного материала и имеющем полюса магнитов в соседних пальцах разноименные, о тли чающийся тем, что, с целью обеспечения надежного захвата изделий за счет достижения ориентированного положения каждого звена относительно поверхности изделия, он снабжен трубками, вьтолненны- ми из гибкого материала с буртиками, каждая из которых закреплена одним концом в корпусе и размещена внутри звеньев коаксиально тросику, отверстие каждого промежуточного звена выполнено ступенчатым,ступень с боль- шим диаметром которого расположена с нижнего торца звена для размещения буртика, при этом буртики на трубке выполнены на расстоянии, больпем высоты звеньев, и имеют возможность контактирования с торцами ступеней отверстия большего диаметра при натя- туных тросиках.
ФиеЛ
Фие.2
Фи1.5
Фие.6
