Изобретение относится к робототехнике,
в частности, может быть использовано качестве разжимного захватного устройства автоматического манипулятора или автооператора.
Известен схват манипулятора, содержащий корпус, многозвенные пальцы, звенья которых выполнены в виде тел качения с отверстиями, через которые пропущен тросик, один конец которого закреплен на конечном звене пальца, а другой конец связан с приводом 1 .
Недостаток известного схвата - сложность захвата детали за отверстие.
Цель изобретения - повыщение надежности ввода схвата в отверстие захватываемой детали.
Поставленная цель достигается тем, что в схвате манипулятора, содержащем корпус, многозвенные пальцы, звенья которых выполнены в виде тел качения с отверстиями, через которые пропущен тросик, один конец которого закреплен на конечном звене пальца, а другой связан с приводом, конечное звено каждого пальца выполнено из магнитного материала, причем направления полюсов магнитов конечных звеньев соседних пальцев противоположны.
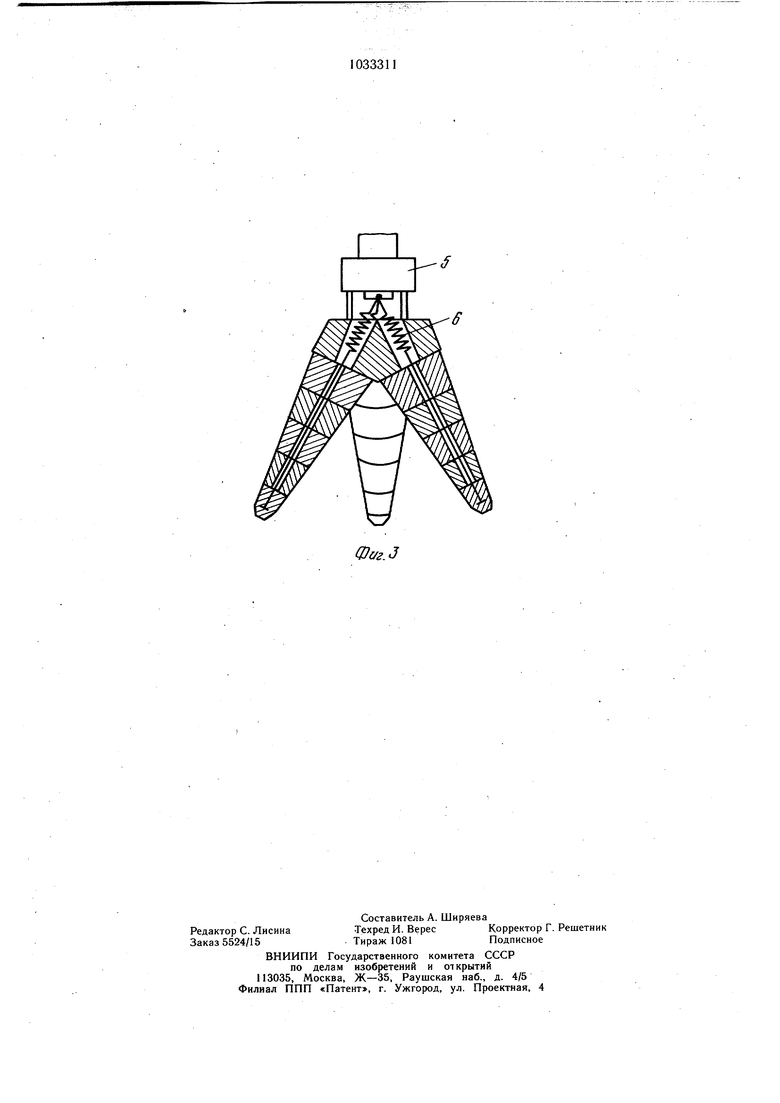
На фиг. 1 показан схват манипулятора со сведенными пальцами; на фиг. 2 - то же, с разведенными пальцами; на фиг. 3 - схват с упругими элементами.
Схват манипулятора состоит из корпуса 1., на отклоняющие поверхности А которого опираются пальцы, состоящие из звеньев 2 в виде цилиндров с пропущенными сквозь них гибкими тросиками 3, заделанными одними концами в конечных звеньях 4, которые выполнены в виде постоянных магнитов, а другими концами соединены с приводом 5 или непосредственно, или через упругие элементы 6 (фиг. 3).
Соседние звенья 2 пальцев могут быть выполнены в виде цилиндров с плоскими сопрягающимися поверхностями, в виде цилиндров с коническими сопрягающимися поверхностями, в виде усеченных конусов, а также могут быть защищены эластичной
оболочкой.
Устройство работает следующим образом. Схват вводится в отверстие заготовки или детали сверху (фиг. 1), тросики 3 в этот момент ослаблены, звенья 2 пальцев свободно свисают, а магниты, являющиеся конечными звеньями 4 пальцев, слипаются вместе. Затем включается привод 5, тросики 3 натягиваются,в результате чего пальцы распрямляются. Заготовка оказывается закрепленной на схвате.
Предлагаемый схват несложен в изготовлении, область применения его и функциональные возможности значительно расщирены, так как пальцы схвата одинаково хорощо работают с отверстиями разной формы: округлой, овальной, многогранной и т. д.
5
. 2
cf
Фаг.З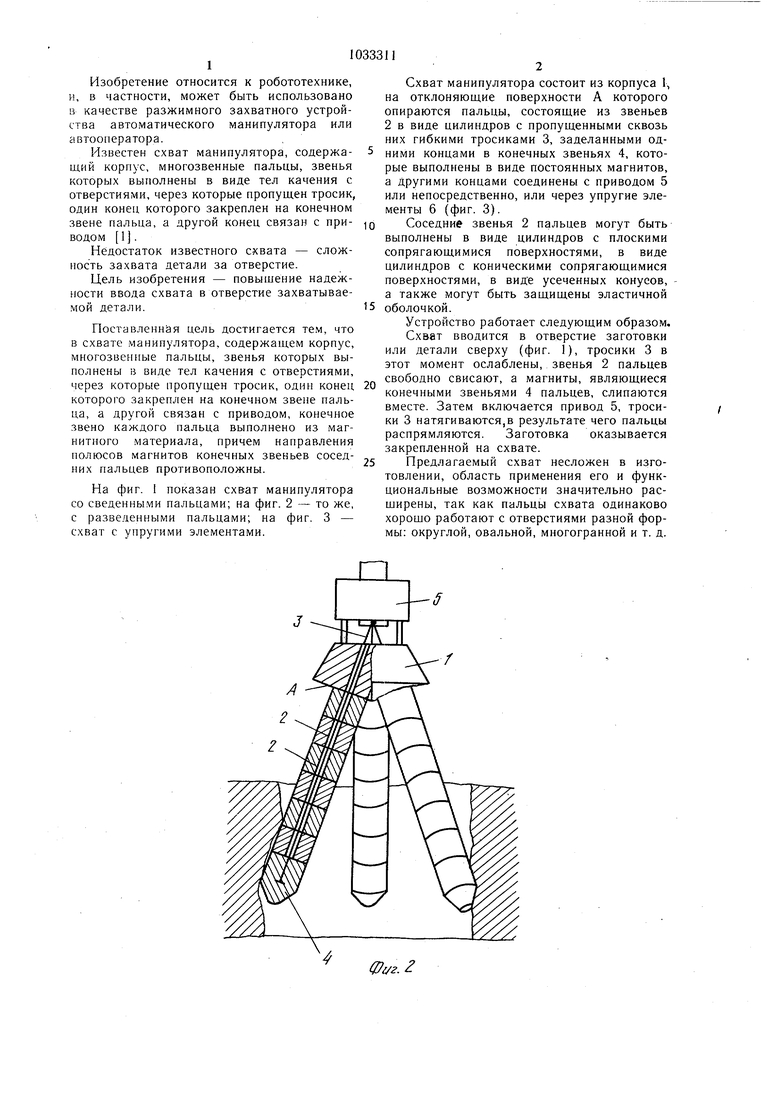
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1987 |
|
SU1495127A1 |
| Схват манипулятора | 1984 |
|
SU1237420A2 |
| Схват манипулятора | 1985 |
|
SU1268409A2 |
| Схват манипулятора | 1985 |
|
SU1240578A1 |
| Схват манипулятора | 1984 |
|
SU1202868A2 |
| Схват манипулятора | 1984 |
|
SU1202874A2 |
| Схват манипулятора | 1984 |
|
SU1202875A2 |
| Схват манипулятора | 1981 |
|
SU992181A2 |
| Схват манипулятора | 1982 |
|
SU1060466A2 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
СХВАТ МАНИПУЛЯТОРА, содержащий корпус, многозвенные пальцы, звенья которых выполнены в виде тел качения с отверстиями, через которые пропущен тросик, один конец которого закреплен на конечном звене пальца, а другой связан с приводом, отличающийся тем, что, с целью повышения надежности ввода схвата в отверстие детали, конечное звено каждого пальца выполнено из магнитного материала, причем направления полюсов магнитов конечных звеньев соседних пальцев противоположны. 11 (Л со со оо .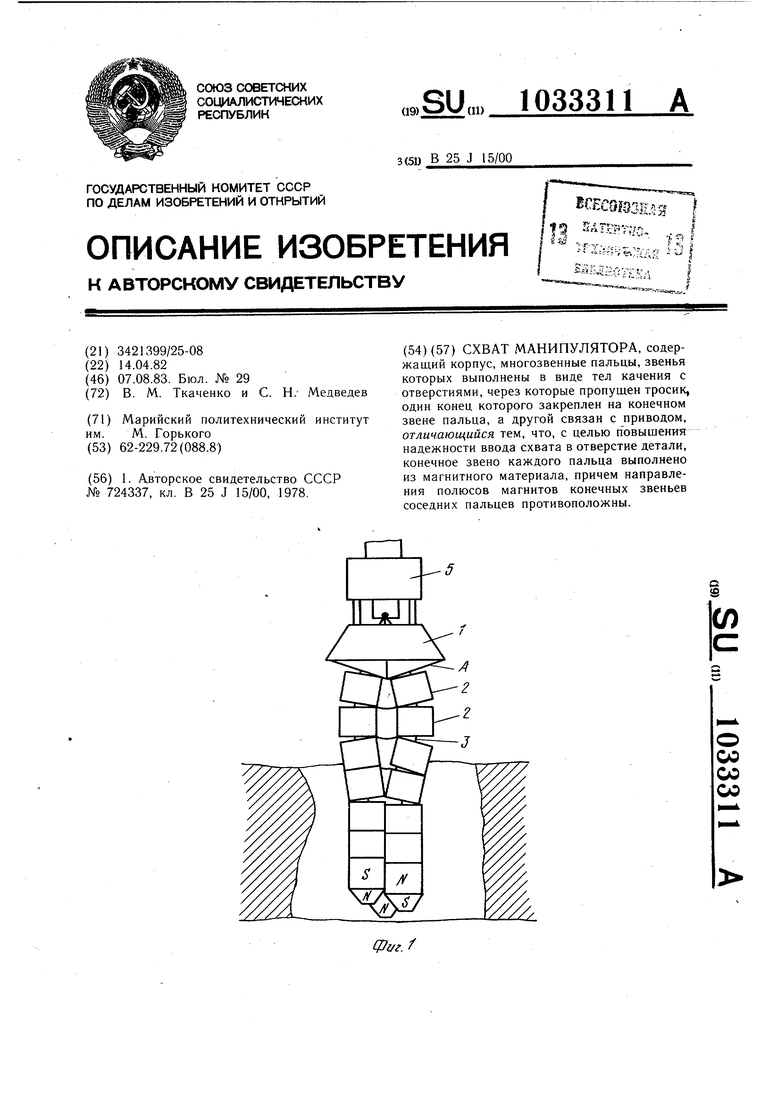
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват манипулятора | 1978 |
|
SU724337A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
