Изобретение относится к роботе-- технике, в частности может быть использовано в качестве захватного устройства автоматического манипулятора,
Цель изобретения - повышение riyy зоподьемности и надеясности за счет защемления деталей с гладкими отвер стиями.
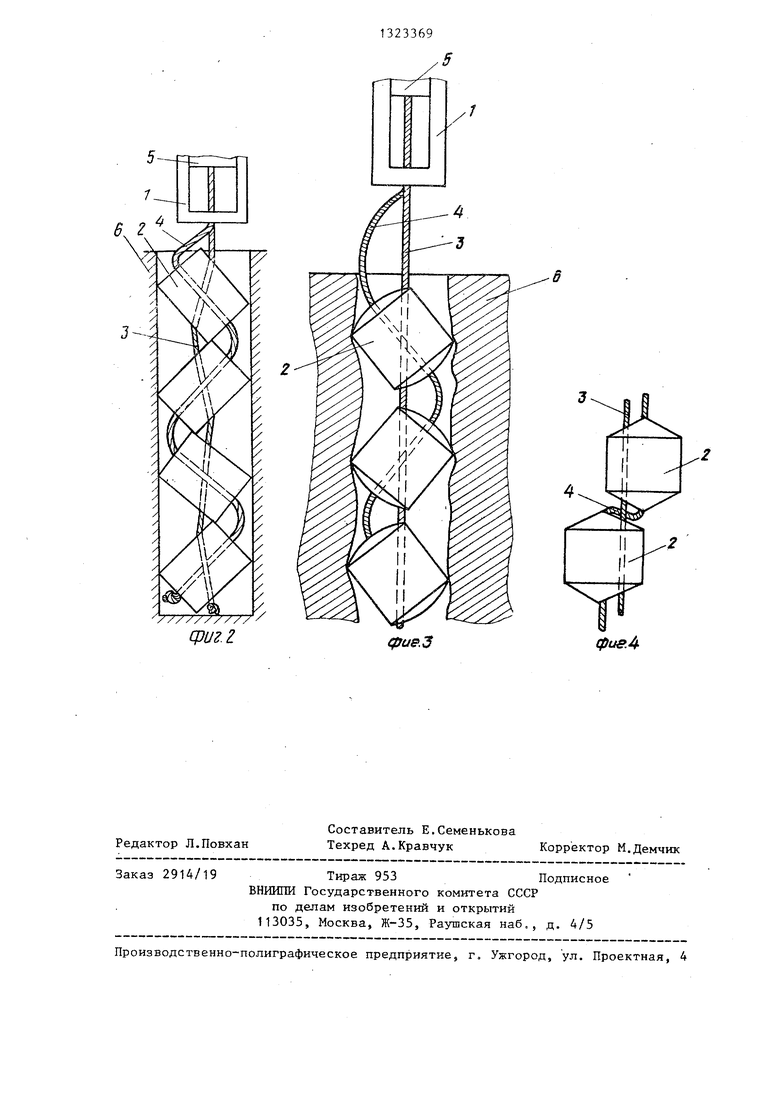
Иа фиг, 1 показан схват, нерабочее положение, момент ввода его в отверстие поднимаемо детали; на фиг« 2 то же, с закрепленной де-- талыо на фиг. 3 - торцы звеньев со сферической поверхностью,, вариант; па фиг, 4 то жед с конической по-Б€1РХНОСТЬЮ.
Охват манипулятора содержит кор- П7С 15 згла-йч в виде звеньев 2 в гЫ. рме тел врацения. В звеньях 2 вп- полнень песовпадающие с осью иргпце- нгьч отверстия, через которые пропз - .,eH грузоподъемный трос 3, а сами звенья канатом 4 соединены по оси вращения между собой и с кopпyco 5 i . Трос 3 соединен с пр:нводом 5, Соприкасающиеся при работе поверхности звеньев 2 могут быть выполнены сферическими или коническими (фиг, 3 и 4)5 что так же как и сферические поверхности при контакте звеньев на тросе 4 улучшает их расклиииваине , Звенья 2 могут быть покрыты антис и ционнььм материалом, HanpiiMep (не показана) , для улучшени.4 сцепления с гладкими отверстия п-1 детали 6.
Предлагаемый охват работает следующим образом.
Устройство вводится сверху в отверстие детали 6 (фиг. 1), трос 3 в этот момент ослаблен, звенья 2 свободно висят на канате 4, выстроив
323369
И1ИС1; ИХ
-10
в одну линию, что обеспечивает свободньп вход в отверстие. Затем вк.пючают привод 5. грузоподъемный трос 3 натягивается, в результате
5 чего звенья 2 поворачиваются и упираются в стенки отверстия. При этом на ка7кдое звено 2 действует расклини- 1.ающая сила, возникающая от стремления троса 3 принять вертикальное по- ....жение, причем чем тяжелее деталь G, тек большее натяжение испытывает трос и тем большая расклинивающая сила действует на звенья 2, Появление расклинивающей силы повышает
надежность закреп-ления деталей с гладкими отверстиями. Затем деталь 6 .транспортируют; отключают привод 5. трос 3 ослабляется, поднимая корпус 1 , звенья 2 одно з а другим г-лекают канатом 4,
«Формула изобретения
1,Схват манипулятора, включающий зажим, выполненный в виде звеньев,
23 представляющих собой тела вращения и два троса, проп ущенных через отверстия в звеньях, причем по крайней мере одно из отверстий выполнено несовпадающим с осью вращения звеньев,
30 а один из тросов связан с приводом, о т л и ч а ю ш, и и с я тем, что, с целью повьЕпения грузоподъемности ч надежности за счет защемления деталей с гладк1-1ми отверстиями, одно из отверстий в звеньях вьшолнено с-оосно оси вращения звеньев, а трос, пропутценный через отверстие, несовпадающее с осью вращения звеньев, связан с приводом,
2,Схват по п, 1, отличаю- п; и и с я тем, что торцовые поверхности звеньев вьтолнены сферическими,
3,Схват по п, 1, отличаю- щ и и с я. тем, что торцовые поверхности звеньев вьтолнены коническими.
35
40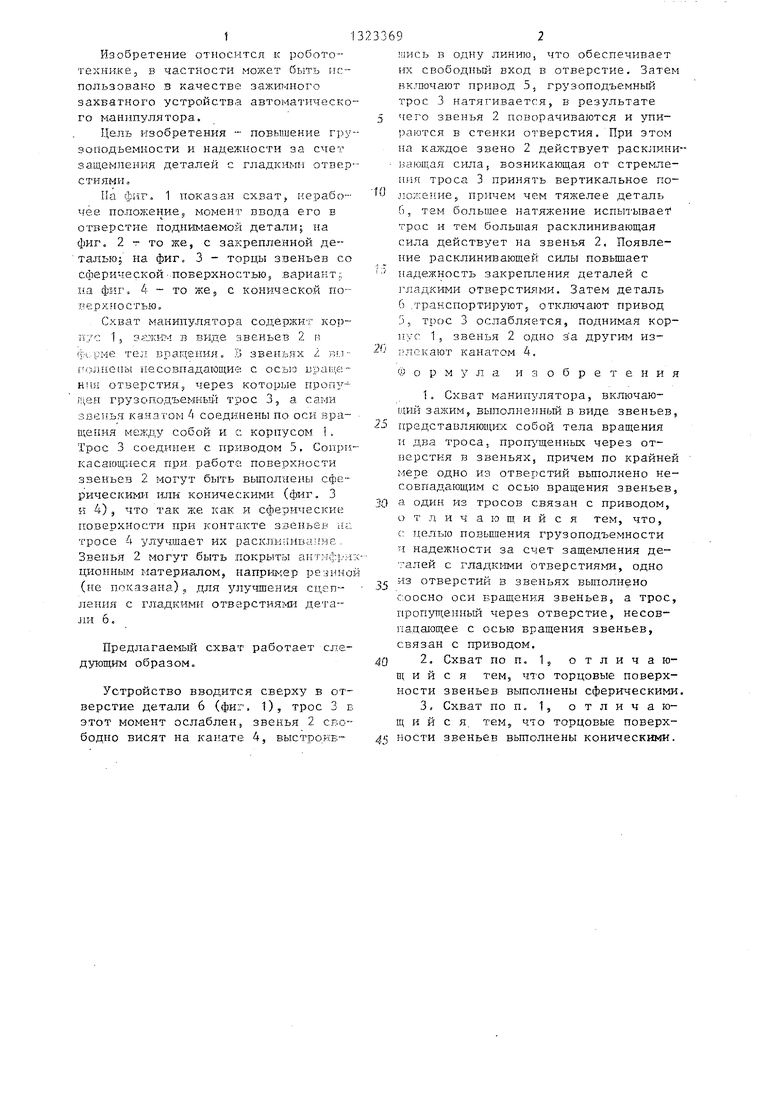
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1985 |
|
SU1268409A2 |
| Схват манипулятора | 1985 |
|
SU1240578A1 |
| Схват манипулятора | 1984 |
|
SU1237420A2 |
| Схват манипулятора | 1984 |
|
SU1202874A2 |
| Захват | 1980 |
|
SU905061A1 |
| Схват манипулятора | 1987 |
|
SU1425083A1 |
| Схват манипулятора | 1984 |
|
SU1202868A2 |
| Схват манипулятора | 1984 |
|
SU1202875A2 |
| Схват промышленного робота | 1987 |
|
SU1495127A1 |
| Схват манипулятора | 1986 |
|
SU1495118A1 |
Изоб етение относится к области машиностроения, в частности к робототехнике, и может быть использовано в качестве зажимного захватного устройства автоматического манипулятора. Целью изобретения является по- вьшзение грузоподъемности и надежности за счет защемления деталей с глад- к ими отверстиями. Схват вводится сверху в отверстие детали 6, тросик 3 в этот момент ослаблен, звенья 2 свободно висят на канате 4, выстроившись в одну линию, что обеспечивает их свободный вход в отверстие. Затем включают привод 5, грузоподъемный трос 3 натягивается, в результате чего звенья 2 поворачиваются и упираются в стенки отверстия. При этом на каждое звено 2 действует расклинивающая сила, возникающая от стремления троса 3 принять вертикальное положение, причем чем тяжелее деталь 6, тем больше натяжение испы- тьшает трос и тем большая расклини вающая сила действует на звенья 2. Затем деталь 6 транспортируют, отключают привод 5, трос 3 ослабляется, и, поднимая корпус 1, одно за другим канатом 4 извлекают звенья 2. 2 з.п. ф-лы, 4 ил. ш САЭ со С5 СО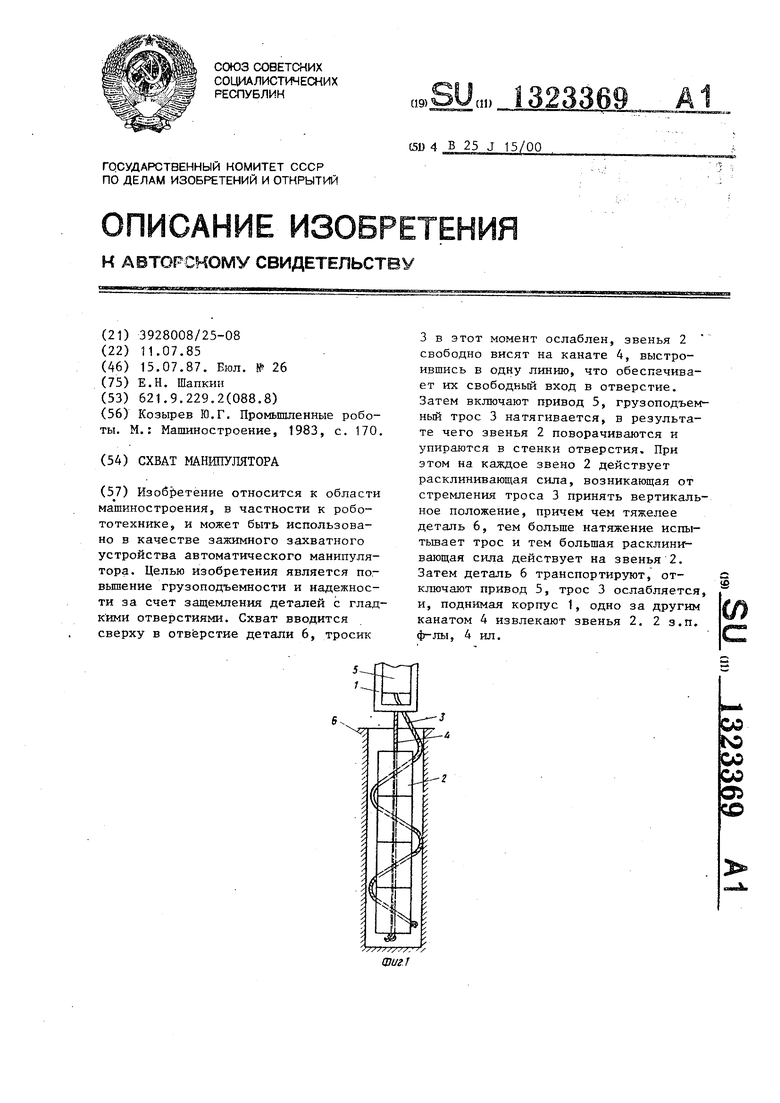
В. г
///
ери г.:
фие.З
фиеЛ
Редактор Л.Повхан
Составитель Е.Семенькова
Техред А.Кравчук Корректор М.Демчик
Заказ 2914/19
Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. Д/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Козырев Ю.Г | |||
| Промышленные роботы | |||
| М.: Машиностроение, 1983, с, 170. |
