Изобретение относится к робототехнике, а именно к захватным устройствам манинуляторов и автооператоров, и является усовершенствованием устройства по авт. св. № 1033311.
Цель изобретения - расширение технологических возможностей схвата.
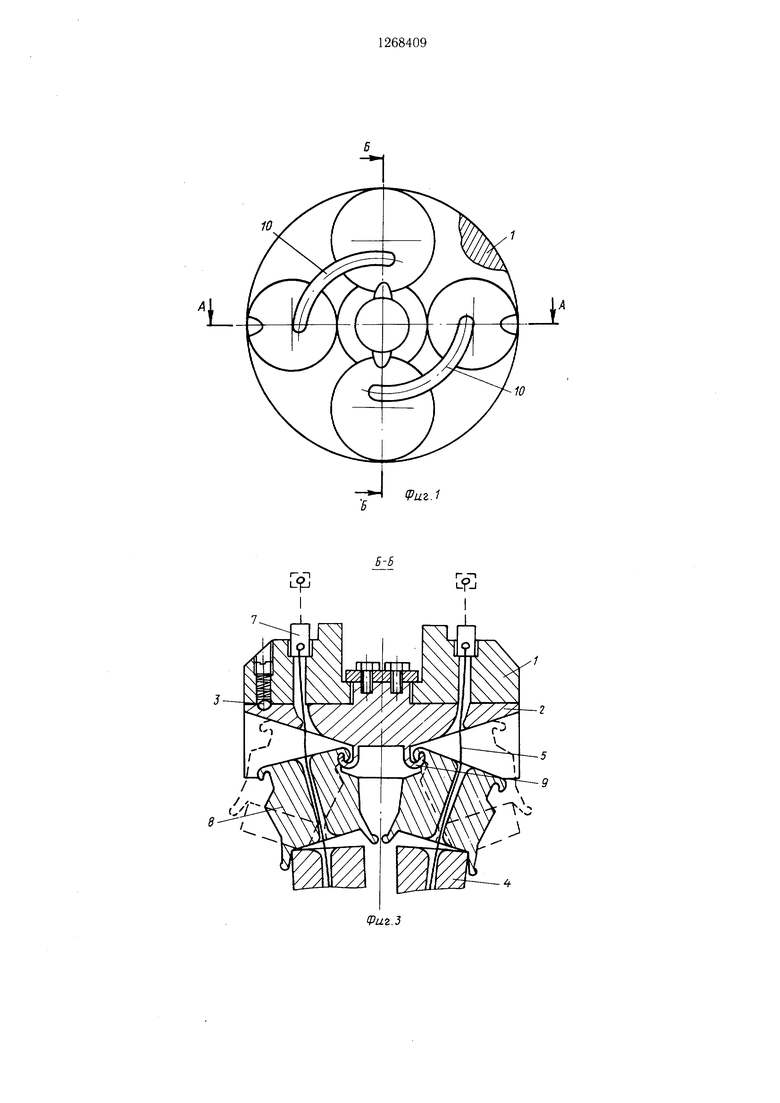
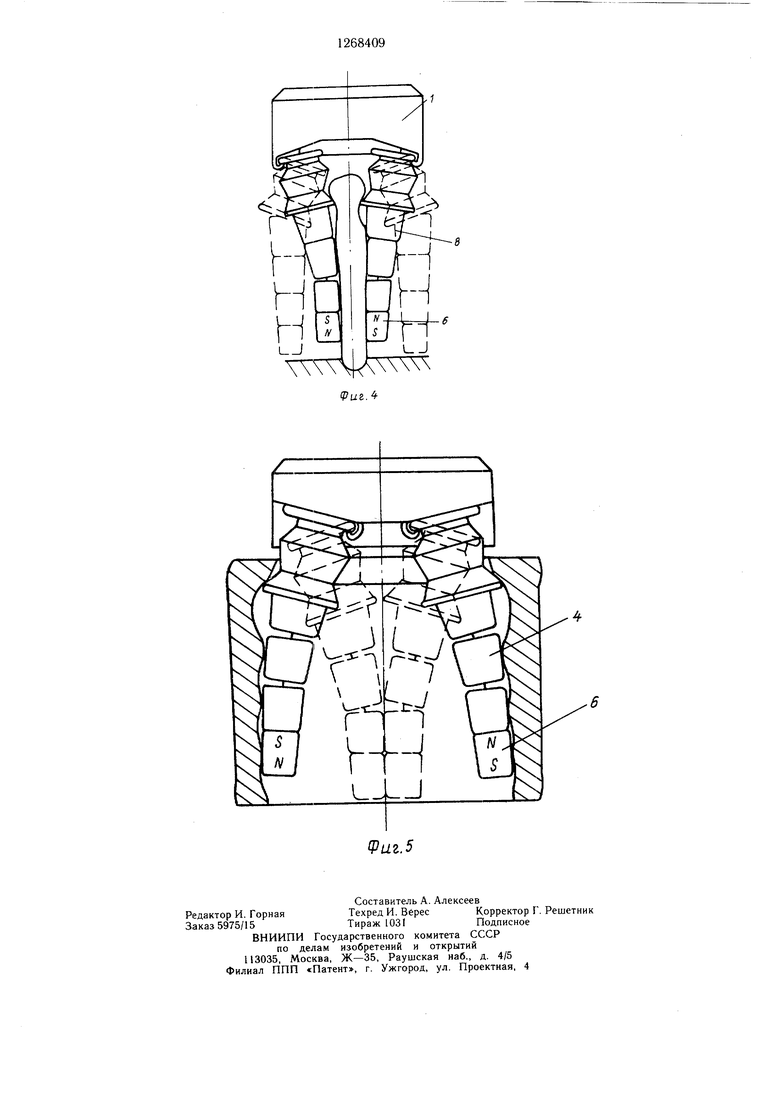
На фиг. 1 показаны опорные поверхности предлагаемого схвата, вид снизу; на фиг. 2 - разрез на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - схват, настроенный для захвата за наружные поверхности (пунктиром показано расслабленное состояние пальцев); на фиг. 5 - то же, для захвата за внутренние поверхности.
Схват манипулятора состоит из корпуса, имеющего два соосных элемента - верхний неподвижный 1 и нижний 2, имеющий возможность поворота с фиксатором 3 углового положения, причем нижний элемент 2 корпуса имеет два типа наклонных опорных поверхностей (на которые опираются пальцы), расположенных по окружности поочередно и имеющих направление вершиной угла, образованного опорными поверхностями, у первого типа (фиг. 1) - в сторону корпуса схвата, у второго типа (фиг. 2) - от корпуса. Пальцы схвата состоят из звеньев 4, выполненных в виде тел вращения с пропущенными сквозь них гибкими тросиками 5, которые закреплены одним концо.м в конечных магнитных звеньях 6, а другим концом соединены с приводом 7, причем начальные звенья 8 могут иметь в верхьшй части буртик с кольцевой канавкой, дно которой направлено в сторону опорной поверхности, а на краю опорных поверхностей в этом случае имеются сопрягаемые с канавками зацепы 9, причем у первого типа опорных поверхностей зацепы расположены с наружного относительно центральной оси схвата края опорной поверхности, а у второго типа - с внутреннего. Начальное звено может быть выполнено из материала с большей плотностью, чем остальные звенья пальцев. Нижний элемент 2 корпуса имеет прорези 10 под тросики, выполненные в виде криволинейных пазов.
Предлагаемый схват работает следующим образом.
Для захвата за наружные поверхности схват настроен так, что звенья пальцев взаимодействуют с поверхностью нижнего элемента 2 корпуса. Схват опускается над деталью (фиг. 4), тросики 5 в этот момент ослаблены, звенья 8 висят на зацепах 9 и пальцы свободно опущены. Затем включается привод 7, тросики натягиваются, пальцы сходятся и деталь оказывается закрепленной в схвате (фиг. 5). Для перестройки на захват за внутренние поверхности тросики необходимо слегка натянуть и повернуть нижний элемент корпуса на угол, равный шагу расположения разноименных опорных поверхностей, который фиксируется фиксатором 3, при этом начальное звено 8 пальцев выйдет из сцепления с зацепами, находящимися на наружном относительно центральной оси схвата крае опорной поверхности и войдет в сцепление с зацепами, находящимися на внутреннем относительно центральной оси схвата крае опорной поверхности.
При ослаблении тросиков начальные звенья пальцев косо повиснут на зацепах и пальцы остальными звеньями сгруппируются вместе благодаря конечным магнит5 ным звеньям 6, что способствует их свободному опусканию в отверстие захватываемой детали, затем включается привод 7, тросики натягиваются, зазоры между звеньями выбираются и пальцы своими начальными звеньями опираются на опорную поверхность, выпрямляются, концы их расходятся до упора в стенки отверстия детали, и последняя закрепляется на схвате. Для перевода в первое положение необходимо ослабить тросики 5 и повернуть нижний
элемент 2 корпуса до сцепления начальных звеньев 8 пальцев с зацепами, находящимися на наружном относительно центральной оси схвата крае опорной поверхности.
Таким образом, наличие на одном схвате
двух типов отклоняющихся поверхностей обеспечивает захват деталей за наружную и внутреннюю поверхность.
Формула изобретения
1.Схват манипулятора по авт.
св. № 1033311, отличающийся тем, что, с целью расширения технологических возможностей, корпус выполнен в виде двух элементов, первый из которых неподвижен, а второй установлен на первом с возможностью поворота и снабжен фиксатором, причем во втором элементе выполнены криволинейные пазы, через которые пропущены тросики, на этом элементе выполнены также
две группы опорных поверхностей, причем угол, образованный опорными поверхностями первой группы, направлен вершиной в сторону корпуса, а угол, образованный опорными поверхностями второй группы -
от корпуса схвата.
2.Схват по п. 1, отличаюи ийся тем, что на начальных звеньях пальцев выполнены буртики с канавкой, дно которой направлено в сторону опорной поверхности второго элемента корпуса, причем на последнем закреплены зацепы, предназначенные для взаимодействия с буртиками начальных звеньев пальцев.
10
Vuz.l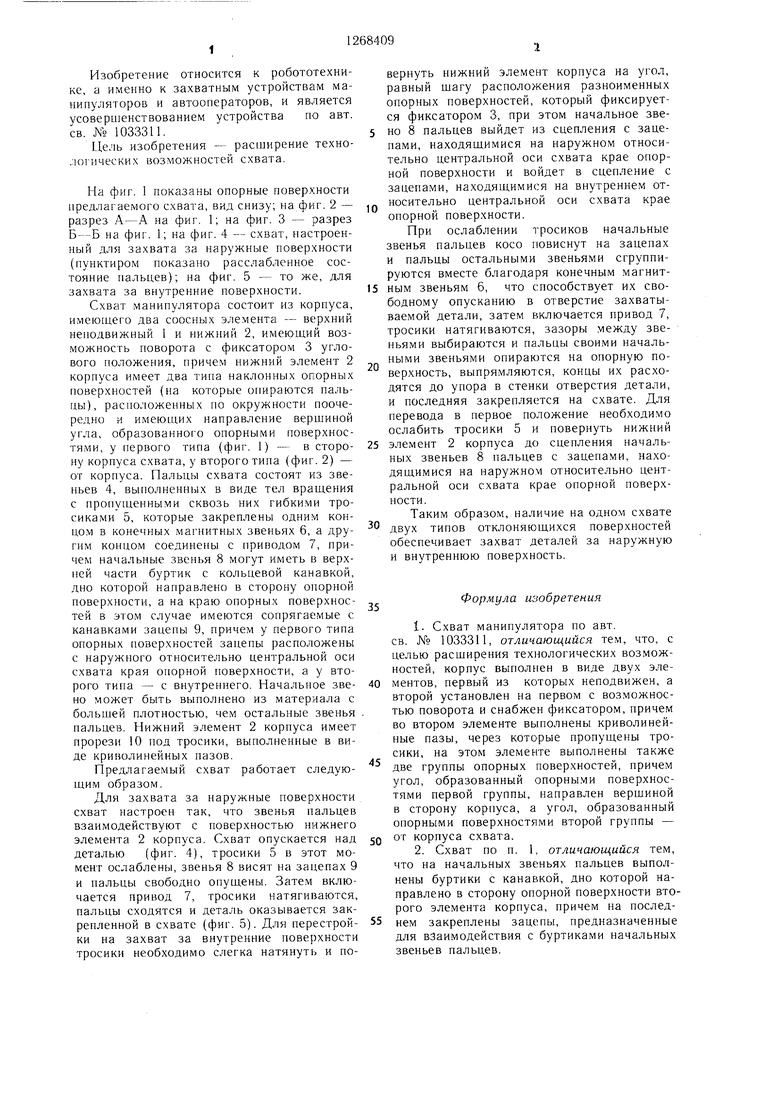
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1987 |
|
SU1495127A1 |
| Схват манипулятора | 1982 |
|
SU1033311A1 |
| Схват манипулятора | 1984 |
|
SU1202874A2 |
| Схват манипулятора | 1985 |
|
SU1240578A1 |
| Захватное устройство манипулятора | 1987 |
|
SU1521581A1 |
| Схват манипулятора | 1984 |
|
SU1202868A2 |
| Схват манипулятора | 1984 |
|
SU1237420A2 |
| Схват манипулятора | 1977 |
|
SU810479A1 |
| Захватное устройство | 1984 |
|
SU1220793A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2179920C2 |
Изобретение относится к робототехнике, а именно к захватным устройствам манипуляторов. Целью изобретения является расширение технологических возможностей. Для захвата детали за наружную поверхность элемент 2 корпуса поворачивают относительно элемента 1 так, чтобы вершина угла пересечения опорных поверхностей была направлена в сторону корпуса. При натяжении тросиков 5 звенья поворачиваются в сторону центра схвата и захватывают деталь. Для захвата детали за внутреннюю поверхность элемент 2 поворачивают относительно элемента 1, а тросики 5 с звеньямипальцев неподвижны. Элемент 2 устанавливают так, чтобы начальные звенья 8 своими канавками буртиков взаимодействовали с зацепами опорных поверхностей, угол пересечения которых своей вершиной направлен от корпуса. Натяжением тросиков 5 деталь захватывается за внутреннюю поверхность. « 1 з.п. ф-лы. 5 ил. (Л Ю о: 00 о ( fsj
| Схват манипулятора | 1982 |
|
SU1033311A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
