. 2. Сгшат по п,1, отличаю - щ и и с я тем, что он снабжен рычагом, шарнирно установленным на корпусе и кинематически связанным с приводом, а тросики закреплены на
Изобретение отно сится к робото- техтпсе и может быть использовано в качестве разяшмного захватного устройства автоматического манипулятора или автооператоря.
Целью изобретения является уменшение его габаритов в нерабочем состоянии, что обеспечивает повьпле ние надежности ввода пальцев в отверстия детали.
На фиг.1 изображен схват манипулятора со сведенньми пальцами на фиг.2 - то же, с разведенными пальцами на фиг.З - начальное звено пальца, схвата, вид со стороны опорной .поверхности.
Схват манипулятора содержит корпус 1, на опорные поверхности А которого опираются пальцы, состоящие из звеньев 2 в виде тел вращения с пропущенными сквозь них гибкими тросиками 3, закрепленными одними концами в конечных звеньях 4, выполне шых в виде постоянных магнитов. Другие концы тросиков 3 закреплены на рычаге 5, шарнирно установленном на корпусе 1 и кинематически связанном с приводом 6, при этом тросики 3 закреплены на рычаге 5 на разном расстоянии от , оси шарнира 7. Тросики 3, наиболее удаленные от оси шарнира 7, выполнены большей длины. Начальное звен 8 каждого пальца имеет на внутренней боковой поверхности выемку, что приводит к смещению центра тяжести кверху и к наружной боковой поверхности,, а отверстие под троси на верхней торцовой поверхности выполнено в виде Г-образного паза, направленного от центра звена в сторону внутренней боковой поверхности, при этом на верхней торцово поверхности с внутренней стороны выполнен выступ, а с наружной стороны выподнена лыска, расположенны
1202874
рычаге на разном расстоянии от оси шарнира, при этом тросики, наиболее удаленные от оси шарнира, выполнены большей длины.
с возможностью взаимодействия соответственно с впадиной и выступом, выполненным на опорной-поверхносТИ А .
Схват манипулятора работает сле- дующим образом.
Пальцы схвата вводятся в отверстие детали 9 сверху (фиг.1), тросики 3 в это время ослаблены, звенья
2 и 4 пальцев свободно свисают, причем начальное звено 8 оказьюается в неустойчивом положении и под действием опрокидывающегося момента, возникающего из-за смещенного центра
тяжести звена относительно опорной площадки на его нижней поверхности, опрокидывается до положения, в котором тросик 3, пройдя от центра .звена по Г-образному лазу,, занимает
крайнее положение, обеспечивая га- шение колебаний начального звена 8 В плоскости разведения пальцев. При опрокидьюании начального звена 8 тросик 3, проходящий сквозь него,
отклоняется в нижней его части в направлении внутренней боковой поверхности пальца, сближая последующие звенья 2 соседних пальцев, в том числе и конечные звенья 4, что
тем самым О1блегчает их магнитное слипание.
Благодаря соединению тросов 3 с приводом посредством рычага 5 и
разной длины плеча для каждого
пальца, а также длины троса 3, пальцы в расслабленном состоянии смещаются друг относительно друга по длине, при этом выступы боковых профилей звеньев одного пальца входят
в соответствующие впадины звеньев другого пальца, сокраР1ая тем самым общий габарит пальцев.
Для зажима детали включается привод 6, тросики 3 натягиваются, в
результате чего пальцы расходятся, распрямляются и зажимают деталь 9.
Фиг2
8
Направление разВе ний
Редактор Л.Гратилло
Составитель И.Бакулина
Техред М.Надь Корректор О.Луговая
Заказ 8366/19 Тираж 1049Подписное
ВНШШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная, ,4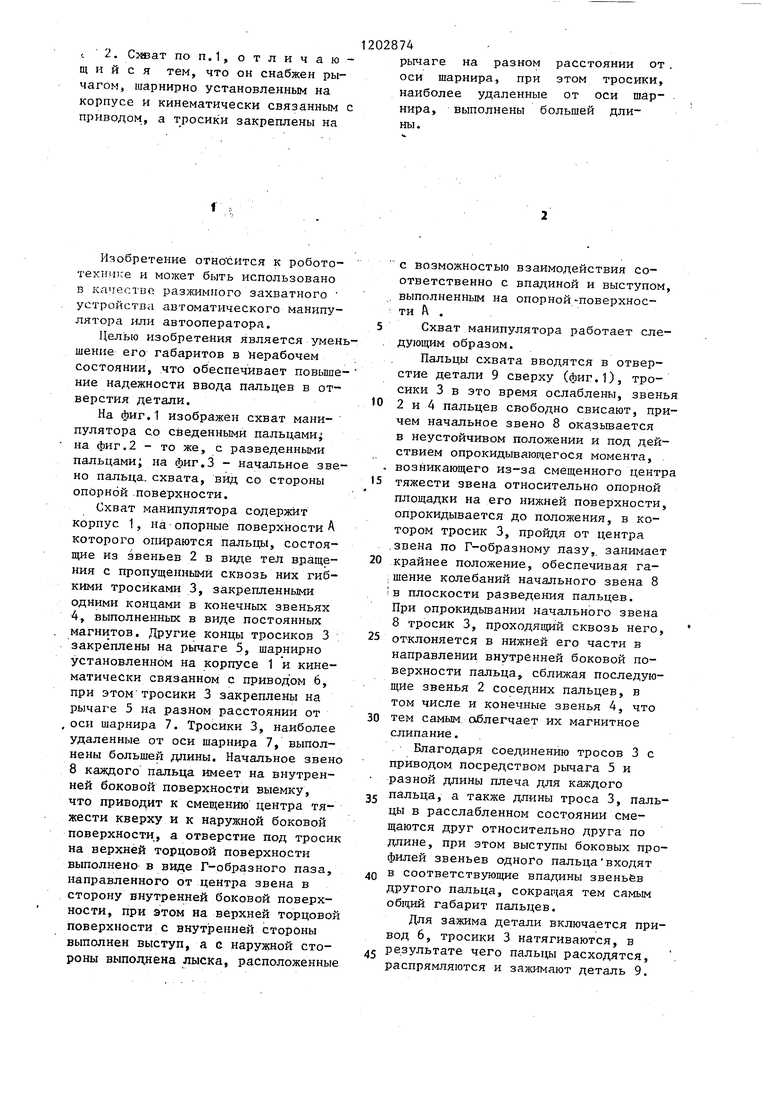
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1985 |
|
SU1240578A1 |
| Схват манипулятора | 1985 |
|
SU1268409A2 |
| Схват манипулятора | 1984 |
|
SU1202875A2 |
| Схват манипулятора | 1984 |
|
SU1202868A2 |
| Схват манипулятора | 1984 |
|
SU1237420A2 |
| Схват манипулятора | 1980 |
|
SU994252A1 |
| Схват манипулятора | 1982 |
|
SU1033311A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Схват манипулятора | 1981 |
|
SU992181A2 |
| Схват манипулятора | 1982 |
|
SU1060466A2 |

| Авторское свидетельство СССР № ЮЗЗЗ П, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
