1
Изобретение относится к робототехнике и может быть использовано в качестве разжимного захватного устройства автоматического манипуляторы или автооператора.
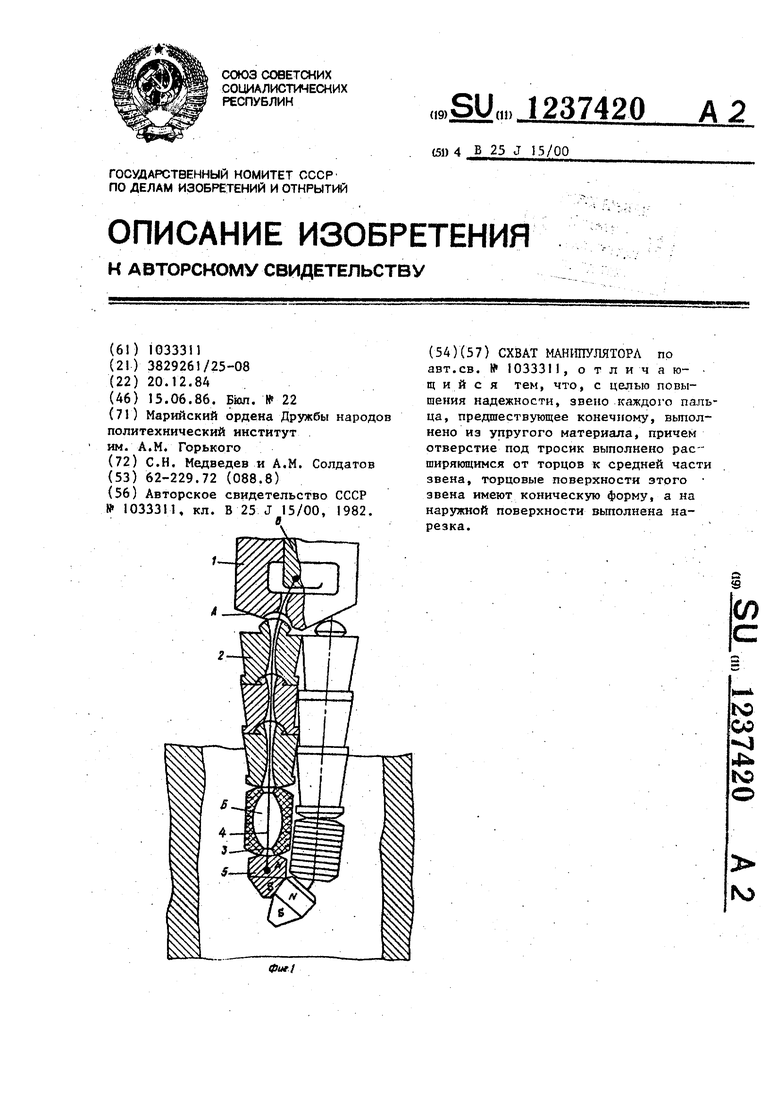
Цель изобретения - повышение надежности удержания детали схватом путем увеличения площади пятна кон-такта пальцев с поверхностью детали.
На фиг. показан схват манипулятора со сведенными пальцами (момент ввода-вывода пальцев в отверстие детали); на фиг. 2 - то же с разведенными пальцами (зажим детали)
Схват манипулятора состоит из корпуса 1, на поверхности А которо- опираются , состоящие из звень ев 2 в виде тел вращения из твердого материала и звеньев 3, предшествующих конечным и выполненных из упругого материала, например резины, с отверстием Б, расширяющимся от торцов к средней части, а торцо- ВЫ поверхности этого звена выполнены коническими. Через отверстия звеньев каждого пальца пропущен гиб - кий тросик 4, один конец которого закреплен на конечном звене 5, а другой соединен с приводом 6. Конечные звенья 5 вьтолнены в виде постоянных магнитов. Суммарные длины звеньев соседних пальцев могут быть различными в пределах половины дд1и- ны конечного звена, а нижние торцы конечных звеньев могут быть выполнены коническими. На наружной поверх ности звеньев 3 выполнена нарезка, например, кольцевая, сетчатая и т.д«
Схват манипулятора работает спе- ую1цим образом.
374202
Схват вводится в отверстие детали сверху (фиг. 1), тросики 4 в этот момент ослаблены, звенья 2 и 3 пальцев свободно свисают, причем звенья
5 3 имеют формз цилиндров с гладкой нарзокной поверхностью, конечные звепья 5 находятся во взаимном контакте, причем за счет различной длины пальцев конечные звенья их
10 слипаются по коническим и цилиндрическим поверхност тм, тем са- мым заходную поверхность и снижая площадь торцовой поверхности пальцев, попадание которой при вводе
15 схвата на кромку отверстия может привести к невведению пальцев в отверстие детали. Затем включается привод 6, тросики 4 натягиваются, выбираются зазоры между звеньями, паль20 1да распрямляются, после чего звенья 3 под действием осевой снимающей нагрузки принимают бочкообразную форму стенки, нарезки расходятся, внешняя поверхность становится ребристой,
25 что обеспечивает лучшее взаимодействие со стенками отверстия, препятствуя проскользыванию пальцев. Деталь оказывается закрепленной на схвате. Конические торцовые поверхности
30 упругого звена и расп иряющееся в
середине центральное отверстие обеспечивают направление деформации звена, приводящей к образованию бочко - образной Дюрмы звена при сжатии,
5(5 Звено 3 может быть выполнено без расширения отверстия, при этом оно должно иметь более эластичную сердце- вику или плоские торцовые поверхности. Конечное звено 5 и.предыдущее
40 звено 2 выполнены с торцевыми поверхностями, имеющими внешний конус.
Редактор A. Лежнина
Составитель И. Бакулина
Техред Г.Гербер Корректор
Заказ 3237/17
Тираж 1031
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
cpue.Z
Л. Пгшипенко
Подписное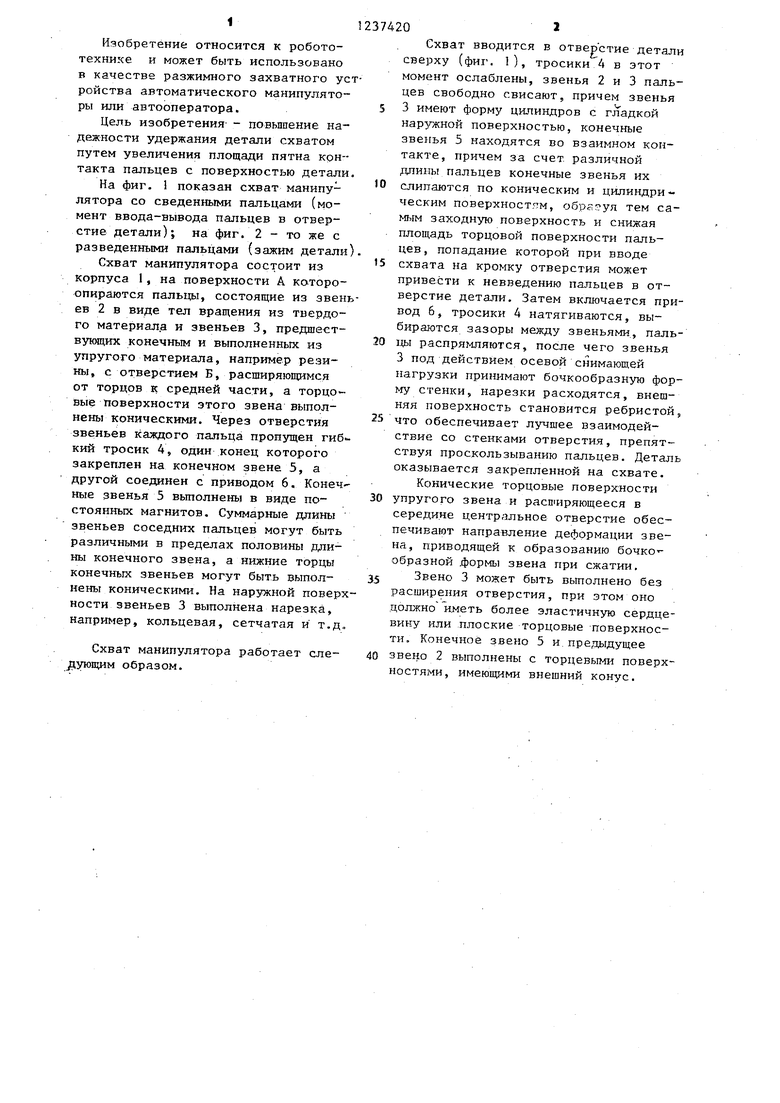
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1985 |
|
SU1240578A1 |
| Схват манипулятора | 1982 |
|
SU1033311A1 |
| Схват промышленного робота | 1987 |
|
SU1495127A1 |
| Схват манипулятора | 1984 |
|
SU1202868A2 |
| Схват манипулятора | 1984 |
|
SU1202874A2 |
| Схват манипулятора | 1984 |
|
SU1202875A2 |
| Схват манипулятора | 1985 |
|
SU1323369A1 |
| Схват манипулятора | 1985 |
|
SU1268409A2 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО | 2019 |
|
RU2762223C2 |
| Схват манипулятора | 1982 |
|
SU1033311A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
