Изобретение относится к робототехнике, а именно к захватным устройствам промышленных роботов.
Целью изобретения является упрощение системы управления путем сокращения количества двигателей.
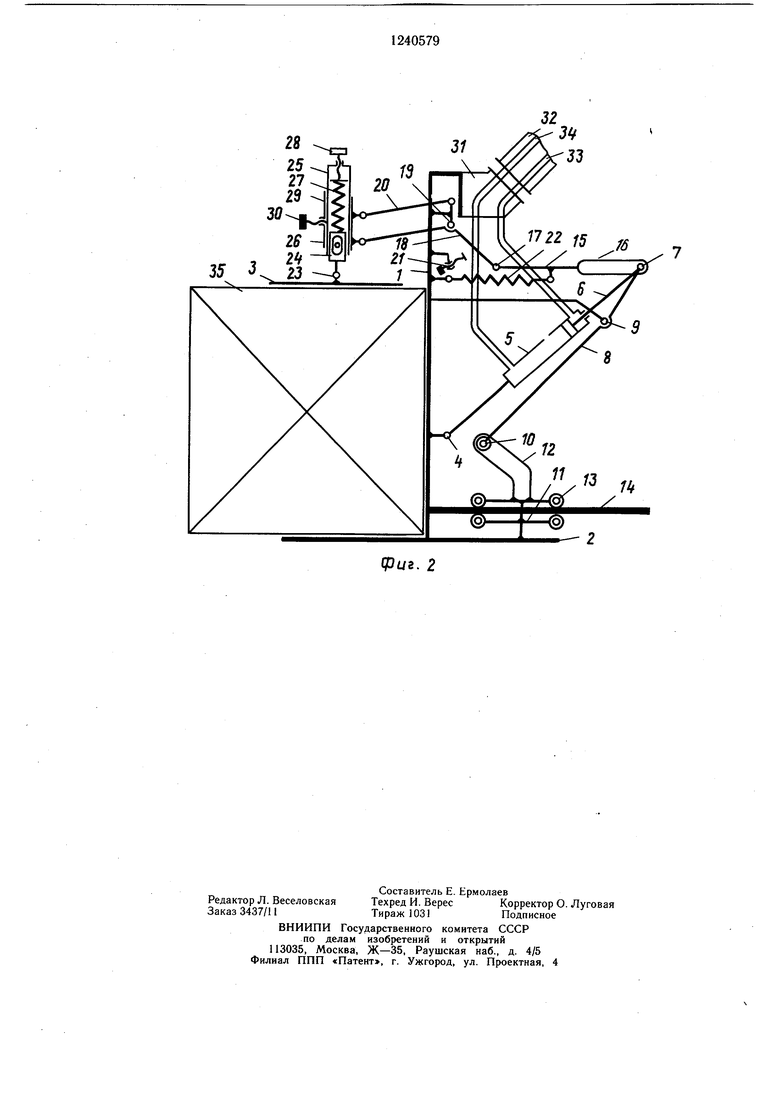
На фиг.1 показана кинематическая схема захватного устройства в открытом положении; на фиг.2 .- то же, в закрытом положении.
Захватное устройство содержит вертикально ориентированную опорную плиту 1, которая в нижней часТи снабжена горизонтальными подвижными поддерживающими элементами 2, а в верхней части - горизонтальным прижимным элементом 3, подвижным в направлении поддерживающих элементов 2. К опорной плите 1 прикреплен на проущине с щарниром 4 пневмоци- линдр 5 двустороннего действия. Шток 6 пневмоцилиндра 5 связан через щарнир с роликами 7 и двуплечим рычагом 8. Рычаг 8 жестко связан с плитой через щарнир 9. На конце рычага 8 расположен ролик 10, который взаимодействует с кареткой 11 через фигурный паз 12. Каретка 11 снабжена роликами 13, обеспечивающими ее движение вдоль горизонтальной направляющей 14, жестко связанной с опорной плитой 1. Кулиса 15 с прямым пазом 16 соединена через шарнир 17 с параллелограммным механизмом, содержащим боковое звено 18 в виде двуплечего рычага, связанного шарниром 19 с опорной плитой 1, и боковое звено 20 и основные звенья, жестко связанные соответственно с опорной плитой 1 и прижимным элементом 3. На опорной плите 1 установлены ограничивающий упор 21 с регулировочным винтом и пружина растяжения 22, соединенная с кулисой 15. Прижимной элемент 3 снабжен шарниром 23(с ограничением угла поворота) и компенсатором, состоящим из ползуна 24 с вертикальным пазом, стакана 25, щтифта 26, пружины 27 и регулировочного винта 28. Стакан 25 размещен в направляющей 29 со стопорным винтом 30. Опорная плита 1 жестко связана с корпусом 31, который крепится к кисти 32 руки робота. Команды к пневмоцилиндру 5 подводятся от кисти 32 по пневматическим линиям 33 и 34.
Захватное устройство работает следующим образом.
При подаче сжатого воздуха в штоко- вую полость пневмоцилиндра 5 по линии 33 и соединении его бесштоковой полости с атмосферой через линию 34 (фиг.1) прижимной элемент 3 поднимается, а затем поддерживающие элементы 2 убираются. Схват находится в открытом положении.
При подаче сжатого воздуха (фиг.2) в бесштоковую полость пневмоцилиндра 5 по
0
0
5
5
0
линии 34 и соединении его щтоковой полости с атмосферой через линию 33 происходит выдвижение поддерживающих элементов 2 под груз, например пачку 35, которым должно манипулировать захватное устройство. Движение элементов 2 происходит за счет движения ролика 10 двуплечего рычага 8 по прямой вертикальной части фигурного паза 12 каретки 11. Когда ролик 10 попадает в криволинейную часть фигурного паза 12, движение элементов 2 прекращается. Во время движения элементов 2 прижимной элемент 3 неподвижен, так как ролик 7 движется по прямолинейному пазу 16 кулисы 15. После окончания движения элементов 2 происходит опускание прижимного элемента 3 за счет движения кулисы 15 после достижения роликом 7 правого конца паза 16. При движении кулисы 15 происходит растяжение пружины 22. Прижимной элемент 3 опускается на пачку 35 и фиксирует ее.
Захватное устройство находится в закрытом положении, пачка зажата.
Далее робот переносит пачку в требуемое место и раскрывает захватное устройство при подаче сжатого воздуха (фиг.1) в штоковую полость пневмоцилиндра 5 и соединении его бесштоковой полости с атмосферой прижимной элемент 3 поднимается под действием пружины 22, причем подъем элемента 3 ограничивается упором 21. После окончания подъема элемента 3 поддерживающие элементы 2 убираются из-под пачки 35. При этом опорная плита 1 препятствует движению пачки 35 вслед за поддерживающими элементами 2 и пачка остается на месте. Затем рука робота с захватным устройством перемещается к следующей пачке, и работа механизмов устройства повторяется.
Пружина 27 служит для настройки величины сжимающего усилия, действующего на пачку со стороны прижимной планки 3. Настройка осуществляется с помощью винта 28. Настройка начального положения прижимного элемента относительно направляющей 29 осуществляется перемещением стакана 25 (в зависимости от высоты пачки 35) и фиксируется стопорным винтом 30.
Таким образом, движение поддерживающих элементов 2 и прижимного элемента 3 в необходимой последовательности осуществляется с помощью одного пневмоцилиндра 5. При этом часть хода пневмоцилиндра используется для перемещения элемента 2, а другая часть - для перемещения прижимного элемента 3. Для управления захватным устройством необходима всего лишь одна пневматическая команда («Захват-отпускание).
tpaa. 2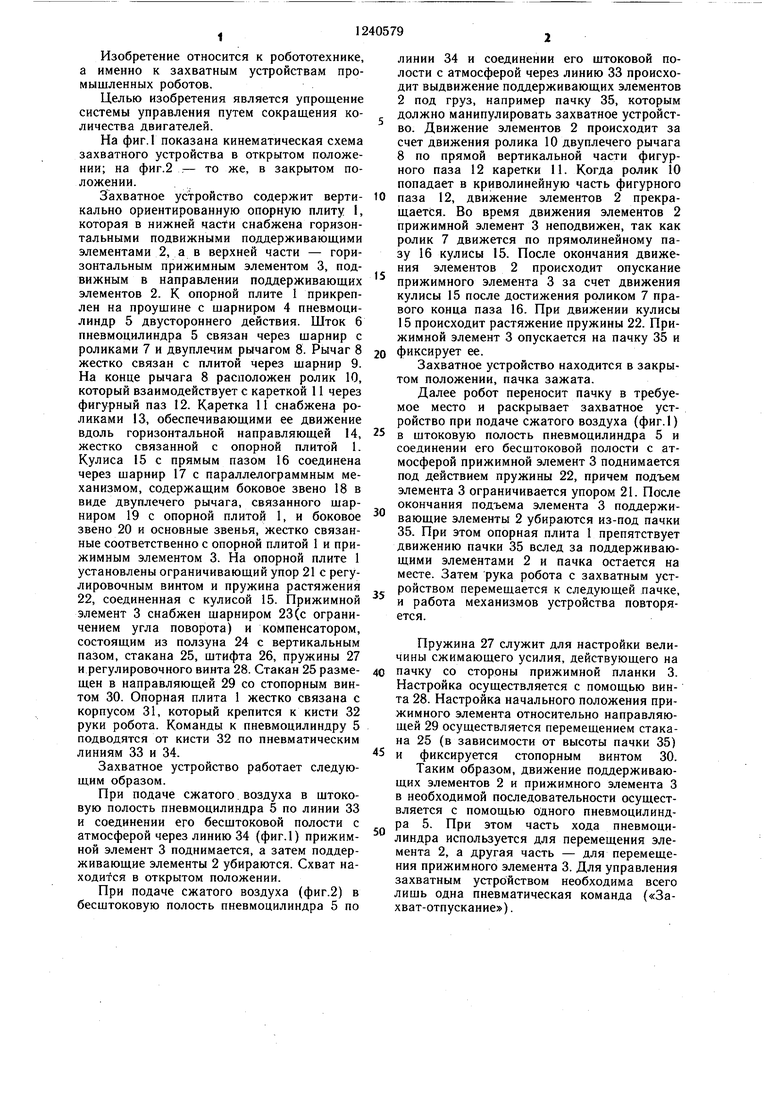
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство рубки движущейся ленты древесного шпона с ножом и узлом его натяжения, включая механизм вертикального перемещения прижимного вала с натяжителем цепи | 2021 |
|
RU2807977C2 |
| Промышленный робот | 1988 |
|
SU1604496A2 |
| Устройство для маркировки этикеток | 1991 |
|
SU1781135A1 |
| Устройство для разбора пакета длинномерных изделий и поштучной их выдачи | 1985 |
|
SU1386537A1 |
| Устройство для накладки деталей низа обуви на след | 1977 |
|
SU735236A1 |
| Устройство для полирования криволинейных поверхностей деталей | 1982 |
|
SU1085780A2 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Устройство очистки внутренней поверхности труб | 2022 |
|
RU2794193C1 |
| Штамп Клещева Н.А.для радиального выдавливания зубчатых деталей | 1986 |
|
SU1397143A1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| БУНКЕР-ПЕРЕГРУЖАТЕЛЬ | 1972 |
|
SU421781A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
