/J
со оо
О5 ел
СО
/7 Л
/
22
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поштучной выдачи длинномерных цилиндрических изделий | 1983 |
|
SU1247335A1 |
| Устройство для штучной выдачи длинномерных изделий | 1986 |
|
SU1426902A2 |
| Устройство для поштучной выдачи заготовок | 1983 |
|
SU1159852A1 |
| Устройство для передачи пачки длинномерных изделий от транспортного средства к питателю | 1989 |
|
SU1684198A1 |
| Устройство для накопления и поштучной выдачи длинномерных цилиндрических изделий | 1984 |
|
SU1286482A1 |
| Устройство для поштучной выдачи длинномерных грузов | 1984 |
|
SU1232603A2 |
| Устройство для упаковывания цилиндрических изделий | 1984 |
|
SU1303496A1 |
| Перекладыватель заготовок к прессу | 1979 |
|
SU863427A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| АВТО/\^АТИЧЕСКАЯ ЛИНИЯ УПАКОВКИ ИЗДЕЛИЙ | 1973 |
|
SU408741A1 |
Изобретение относится к области транспортной техники, а именно к устройствам для поштучной выдачи длинномерных изделий. Цель изобретения - повышение надежности. Устройство содержит разгрузочные направляюш,ие 13, на которых подвижно установлен механизм захвата изделий, выполненный из кривошипа 5 и кулисы 6, связанных ползуном 7. На направляющих 13 шарнирно закреплены Двуплечие рычаги 16 с противовесом 17 и двуплечие управляюш,ие рычаги 21, связанные с двуплечими рычагами 16 посредством элементов зацепления 29 и пальцев 18. Рычаги 16 являются упорами для изделий, надвигающими последние на механизм захвата. 4 ил. (Л
//
иг.З
Изобретение относится к транспортной технике, а именно к устройствам для разбора пачек изделий (труб, бревен, стержней и т.д.) и поштучной их выдачи.,
Цель изобретения - повышение надежности.
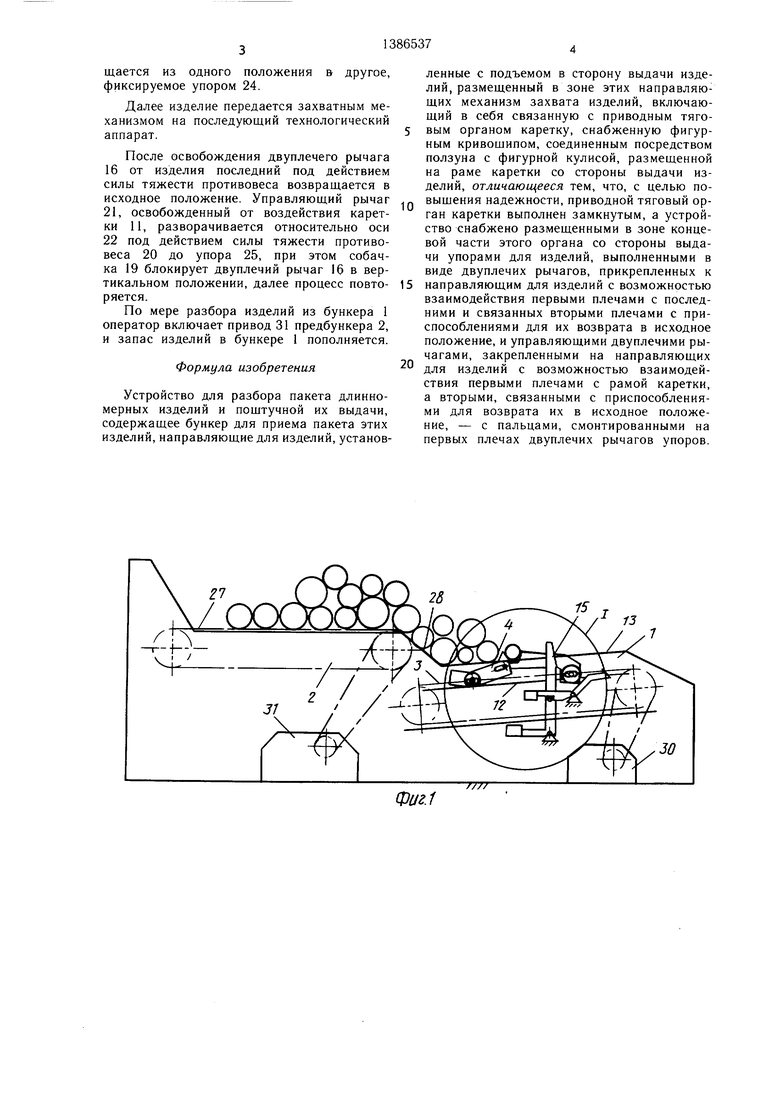
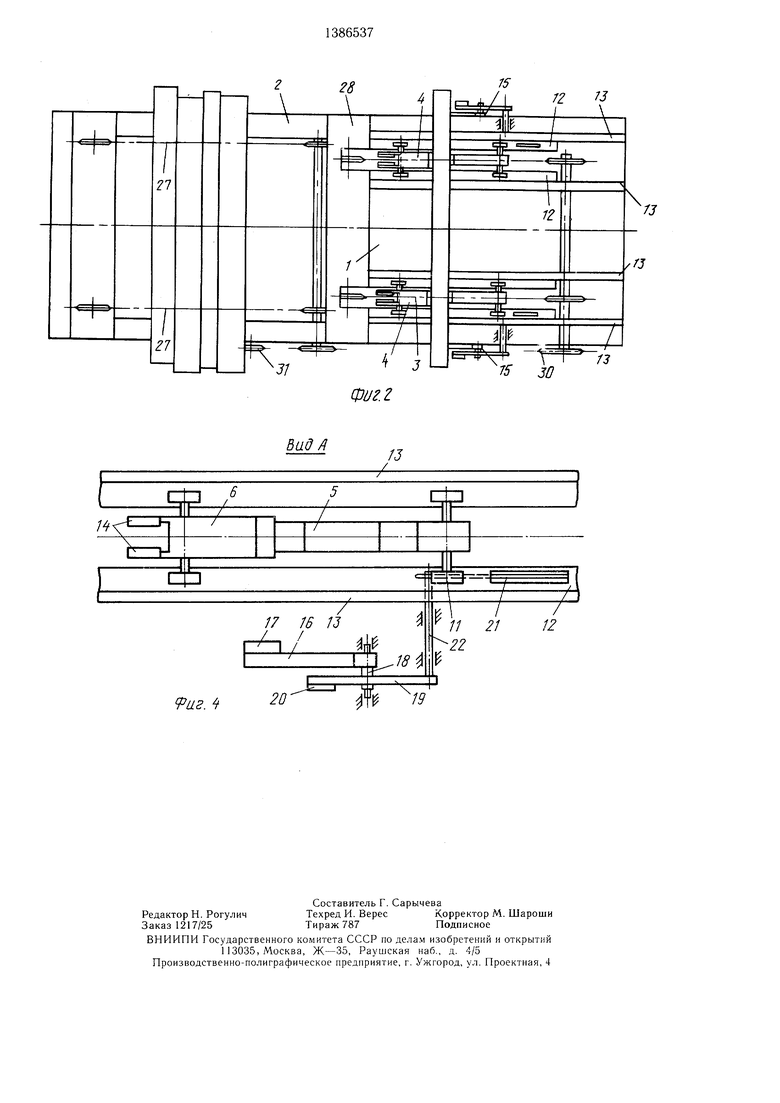
На фиг. 1 показано предлагаемое устройство, обш,ий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - узел I фиг. 1; на фиг. 4 - вид А на фиг. 3.
Устройство состоит из двух технологически взаимосвязанных частей, бункера 1 и предбункера 2. Последний конструктивно представляет собой двухцепной поперечный транспортер фрикционного типа. Бункер 1 представляет собой двухцепной поперечный транспортер, тяговые органы 3 которого ос- наш,ены специальными захватными механизмами 4, состоящими из фигурного кривошипа 5 и фигурной кулисы 6, шарнирно соединенных между собой ползуном 7. Рабочая поверхность 8 кулисы 6 выполнена по дуге окружности, центр которой совпадает с осью качания кулисы 6. В теле кулисы вырезана прорезь 9, в которой скользит ползун 7. Кривошип 5 и кулиса 6 шарнирно закреплены на осях 10 тягового органа 3. На концах осей 10 шарнирно закреплены каретки 11, на которых по направляющим 12 имеют возможность перемещаться захватные механизмы 4. Рабочие поверхности 8 кулис 6 удерживаются над направляющими 13 под действием силы тяжести противовесов 14. По ширине устройства устанавливается два захватных механизма 4. Направляющие 13 имеют подъем в сторону выдачи.
На направляющих 13 бункера 1 в зоне приводного вала тягового органа 3 установлена пара упоров-механизмов 15, каждый из которых состоит из шарнирно закрепленного двуплечего рычага 16, оснащенного противовесом 17 возврата рычага в исходное положение и горизонтально расположенным пальцем 18, блокирующим рычаг 16 в рабочем положении посредством собачки 19, оснащенной противовесом 20 возврата, которая жестко связана с управляющим рычагом 21, качающимся на оси 22 и взаимодействующим с кареткой 11 захватного механизма. Двуплечий рычаг 16, собачка 19 и управляющий рычаг 21 имеют соответственно ограничительные упоры 23 и 24, 25 и 26. Направляющие бункера 1 и тяговые цепи 27 предбункера 2, сопряженные между собой наклонной площадкой 28, образуют единую буферную емкость, которая позволяет создать значительный запас изделий. Управляющий рычаг 21, представляющий единое целое с собачкой 19, выполнен с элементом 29 зацепления с пальцем 18. Бункер 1 и предбункер 2 имеют индивидуальные приводы 30 и 31.
Устройство работает следующим образом.
Пачка издeлi:: (бревен, труб, стержней и т.д.) подается краном или другим любым грузоподъемным механизмом на тяговые цепи предбункера 2. При включении привода 31 предбункера 2 приводятся в движение тяговые цепи 27 и за счет сил трения, возникающих между тяговыми цепями и изделиями, происходит перемещение пачки изделий в направлении бункера 1. На наклонной площадке 28 происходит частичный развал пачки изделий и их ориентация относительно линии пересечения наклонной площадки 2 с направляющими.
При включении привода 30 бункера 1 захватные механизмы 4, установленные на тяговые органы 3, подаются под пачку изделий, находящуюся на направляющих. Под действием веса изделий кривощип 5 (фиг. 2) разворачивается относительно оси 10 и, действуя на ползун 7, заставляет кулису 6 вращаться. В результате захватный механизм, преодолевая момент, создаваемый силой тяжести противовеса 14, устанавливается на уровне верха направляющих и в утопленном положении проходит под пачкой изделий.
В момент, когда перед кривощипом 5 останется несколько крайних изделий пачки (от одного до трех), захватный механизм под действием силы тяжести противовеса 14 возвращается в исходное положение, преодолевая силу тяжести этих изделий и толкает их перед собой до двуплечего рычага 16, который заблокирован в вертикальном положении собачкой 19. При встрече транспортируемых таким образом изделий с двуплечим рычагом 16, они остановятся, а так как движение захватного механизма продолжается, то изделия надвигаются на кривошип и тем самым увеличивают плечо утапливающего момента от силы тяжести изделий относительно оси крепления кривошипа. С этого момента захватный механизм
движется под изделиями в утопленном положении и двуплечий рычаг 16 остается заблокированным собачкой 19 до положения, пока точка А кривошипа 5 отстоит от точки Б двуплечего рычага 16 на расстоянии, равном половине диаметра максимального бревна.
Каретка И надвигается на управляющий рычаг 21, разворачивает его и посредством собачки 19 освобождается двуплечий рычаг 16. При дальнейшем движении зах- ватного механизма кривошип 5 выходит из- под последнего изделия, освобождаясь от силы тяжести последнего, в результате весь захватный механизм раскрывается под действием силы тяжести противовеса 14 и кулиса 6 входит в промежуток между предпоследним и последним изделиями, отделяет крайнее из них от пачки и надвигает его на двуплечий рычаг 16. Последний под действием транспортируемого изделия перемещается из одного положения в другое, фиксируемое упором 24.
Далее изделие передается захватным механизмом на последующий технологический аппарат.
После освобождения двуплечего рычага 16 от изделия последний под действием силы тяжести противовеса возвращается в исходное положение. Управляющий рычаг 21, освобожденный от воздействия каретки 11, разворачивается относительно оси 22 под действием силы тяжести противовеса 20 до упора 25, при этом собачка 19 блокирует двуплечий рычаг 16 в вертикальном положении, далее процесс повторяется.
По мере разбора изделий из бункера 1 оператор включает привод 31 предбункера 2, и запас изделий в бункере 1 пополняется.
Формула изобретения
Устройство для разбора пакета длинномерных изделий и поштучной их выдачи, содержащее бункер для приема пакета этих изделий, направляющие для изделий, установленные с подъемом в сторону выдачи изделий, размещенный в зоне этих направляющих механизм захвата изделий, включающий в себя связанную с приводным тяговым органом каретку, снабженную фигурным кривощипом, соединенным посредством ползуна с фигурной кулисой, размещенной на раме каретки со стороны выдачи изделий, отличающееся тем, что, с целью по„ выщения надежности, приводной тяговый орган каретки выполнен замкнутым, а устройство снабжено размещенными в зоне концевой части этого органа со стороны выдачи упорами для изделий, выполненными в виде двуплечих рычагов, прикрепленных к
направляющим для изделий с возможностью взаимодействия первыми плечами с последними и связанных вторыми плечами с приспособлениями для их возврата в исходное положение, и управляющими двуплечими рычагами, закрепленными на направляющих для изделий с возможностью взаимодействия первыми плечами с рамой каретки, а вторыми, связанными с приспособлениями для возврата их в исходное положение, - с пальцами, смонтированными на первых плечах двуплечих рычагов упоров.
0
/5
/J
ф1/г
BaO /I
/J
| Устройство для поштучной выдачи длинномерных цилиндрических изделий | 1983 |
|
SU1247335A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
