Изобретение относится к грузозахватным устройствам, предназначенным, преимущественно, для захвата и освобождения при кантовании горячих слитков.
Целью изобретения является расширение эксплуатационных возможностей путем обеспечения захвата и освобождения грузов различных размеров.
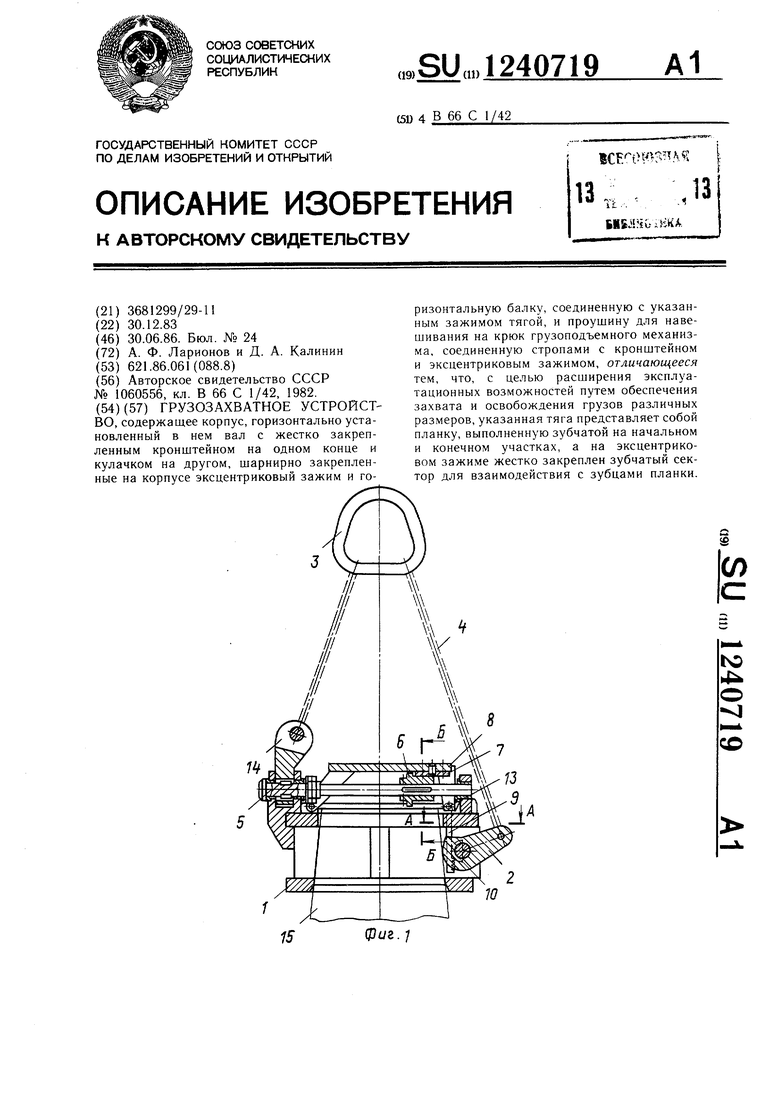
На фиг. 1 показано устройство, общий вид; на фиг. 2 - узел связи тяги с экс- центрико.м; на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 1.
Грузозахватное устройство содержит корпус 1 с эксцентриковым зажимом 2, проу- щину 3 для навещивания на крюк крана
5
Толкатель 7 при этом находится на впадине профилированной поверхности кулачка 6, что соответствует расположению участка 11 со срезанными зубьями против зубчатого сектора 10. В этом положении эксцентрик 2 свободно поворачивается, а положение звеньев кулачкового механизма остается неизменным.
При подъеме крюка крана стропы 4 натягиваются, эксцентрик 2 поворачивается и 10 зажимает слиток 15 в корпусе 1. Осуществляется транспортировка слитка 15 в вертикальном положении.
При опускании слитка 15 до упора движениями крана осуществляют его кантование в горизонтальное положение. Так как
{не показан). Проущина 3 стропами 4 сое-стропь 4 находятся при кантовании в вертидинена с эксцентриком 2 и с горизонтальным валом 5, установленным на корпусе 1. На валу 5 закреплен кулачок 6. кулачкового механизма, толкатель 7 которого посредством шарнирной балки 8 и тяги 9 связан с эксцентриком 2. Тяга 9 выполнена в виде зубчатой рейки, а зубчатый сектор 10 жестко закреплен на эксцентрике 2. На рейке 9 имеются срезы зубьев на участке 11, определяемом пересечением поверхностей вер- щин зубьев сектора 10 и рейки 9 в положении толкателя 7 против впадины профилированной поверхности кулачка 6. Рейка 9 в корпусе 1 установлена в направляюш,их отверстиях 12 и соединена с шарнирной балкой 8 посредством оси 13, установленной в пазу балки 8.
Вторая ветвь гибкого элемента соединяется с валом 5 кронштейном 14, закрепленным на валу 5.
кальной плоскости, а корпус 1 изменит свое положение в этой плоскости, то вал 5 с кулачком 6 через стропы 4 и кронштейн 14 начинает поворачиваться в корпусе 1. Кула2Q чок 6 профилированной поверхностью с высту пом через толкатель 7 отжимает балки 8 вверх. При этом связанная с балкой 8 рейка 9, перемещаясь, входит в зацепление с сектором 10, воздействует на эксцентрик 2 и, преодолевая усилие зажатия слитка 15 от на25 тяжения стропа 4, поворачивает эксцентрик 2 для освобождения слитка 15. В этом положении сила, способствующая выскальзыванию слитка 15 из корпуса 1, меньше силы трения слитка о корпус 1, что исключает его выпадание из корпуса 1. После окончания кантования устройство снимают краном со слитка 15 и устанавливают в исходное положение, так как центр масс находится ниже оси поворота корпуса 1. Устройство готово для захвата и кантования следующего слитка.
30
Устройство работает следующим образом.
Корпус 1 наводят на слиток 15, нахо- дящийся в вертикальном положении. За счет ослабления натяжения стропа 4, соединенного с эксцентриком 2, последний, поворачиваясь, пропускает слиток 15 внутрь корпуса.
Толкатель 7 при этом находится на впадине профилированной поверхности кулачка 6, что соответствует расположению участка 11 со срезанными зубьями против зубчатого сектора 10. В этом положении эксцентрик 2 свободно поворачивается, а положение звеньев кулачкового механизма остается неизменным.
При подъеме крюка крана стропы 4 натягиваются, эксцентрик 2 поворачивается и зажимает слиток 15 в корпусе 1. Осуществляется транспортировка слитка 15 в вертикальном положении.
При опускании слитка 15 до упора движениями крана осуществляют его кантование в горизонтальное положение. Так как
-
кальной плоскости, а корпус 1 изменит свое положение в этой плоскости, то вал 5 с кулачком 6 через стропы 4 и кронштейн 14 начинает поворачиваться в корпусе 1. КулаQ чок 6 профилированной поверхностью с выступом через толкатель 7 отжимает балки 8 вверх. При этом связанная с балкой 8 рейка 9, перемещаясь, входит в зацепление с сектором 10, воздействует на эксцентрик 2 и, преодолевая усилие зажатия слитка 15 от на5 тяжения стропа 4, поворачивает эксцентрик 2 для освобождения слитка 15. В этом положении сила, способствующая выскальзыванию слитка 15 из корпуса 1, меньше силы трения слитка о корпус 1, что исключает его выпадание из корпуса 1. После окончания кантования устройство снимают краном со слитка 15 и устанавливают в исходное положение, так как центр масс находится ниже оси поворота корпуса 1. Устройство готово для захвата и кантования следующего слитка.
Применение изобретения позволяет расширить диапазон размеров захватываемых грузов за счет обеспечения поворота эксцентрика при зажатии слитка без изменения взаимного положения толкателя и кулачка.
0
11
Фиг. 2
05«г.З
ВНИИПИ Заказ 3450/18 Тираж 799Подписное
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
А-А
6-5
(руг, 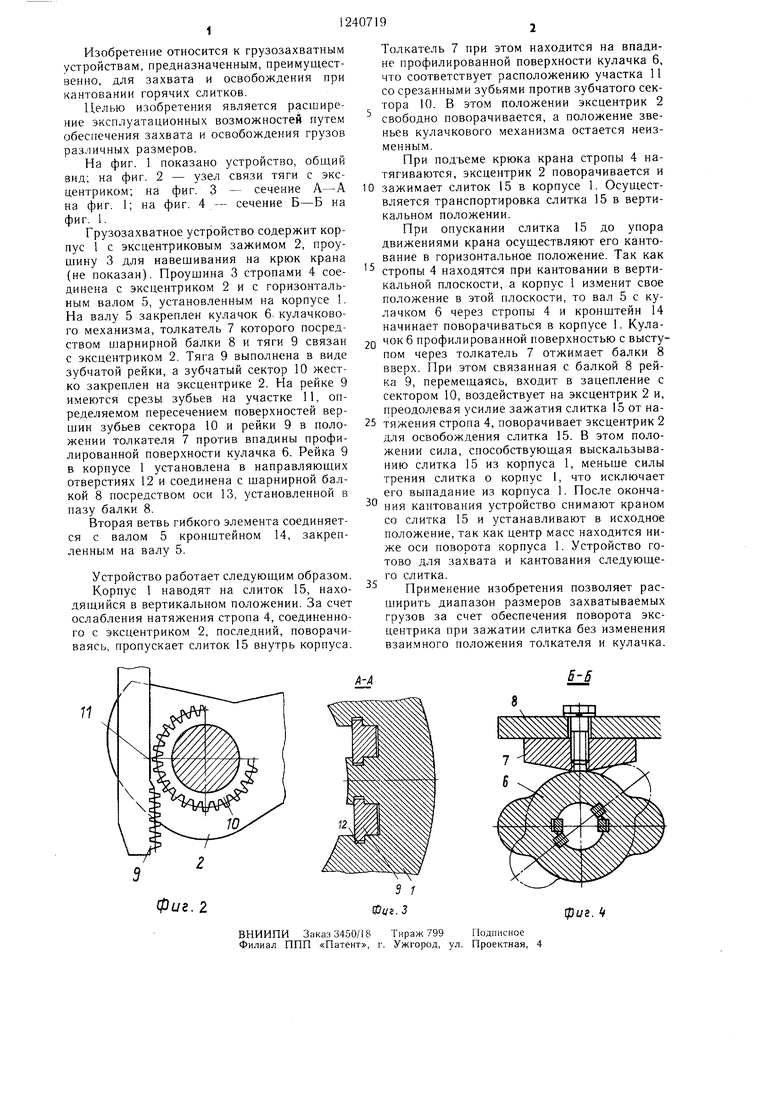
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1982 |
|
SU1060556A1 |
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| Клещевой захват-кантователь | 1981 |
|
SU975559A1 |
| УСТРОЙСТВО ДЛЯ ПРОТИВОПОЖАРНОЙ ЗАЩИТЫ АВТОМОБИЛЯ | 2022 |
|
RU2790891C1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| КАНТОВАТЕЛЬ | 2009 |
|
RU2392216C1 |
| Устройство для кантования слитка | 1983 |
|
SU1152708A1 |
| СТАНОК ДЛЯ ГИБКИ ПРЯМОУГОЛЬНЫХ ТРУБ | 2007 |
|
RU2354479C1 |
| Командоаппарат для управления исполнительными механизмами станков | 1977 |
|
SU739506A1 |
| Устройство для ультразвукового упрочнения зубчатых колес | 1987 |
|
SU1558543A1 |
| Грузозахватное устройство | 1982 |
|
SU1060556A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
