Изобретение относится к захватным устройствам и может быть;. использовано при транспортиировке и штабелировании штучных грузов цилиндрической формы с отбортовкой, например для полиэтиленовых барабанов с двадцатилитровыми стеклянными бутылями с химре- активами и для других аналогичных грузов.
.Цель изобретения - повьшение на- дежиости.
На фиг. 1 схематично показан групповой захват, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 1.
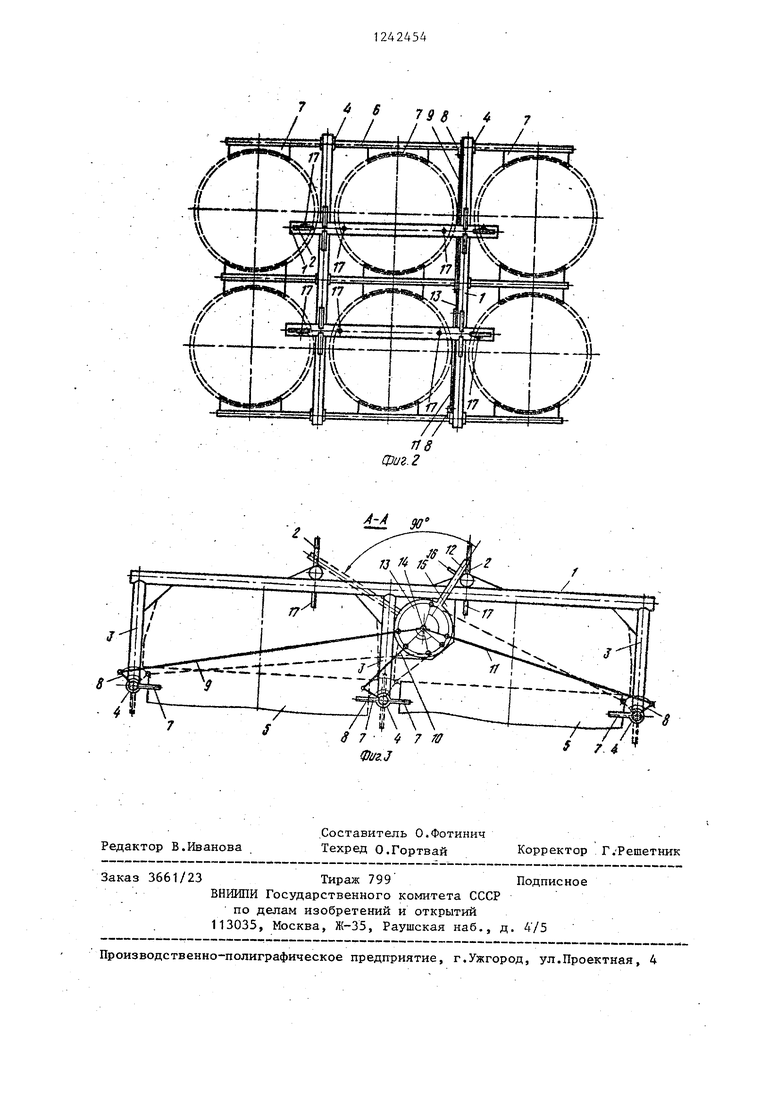
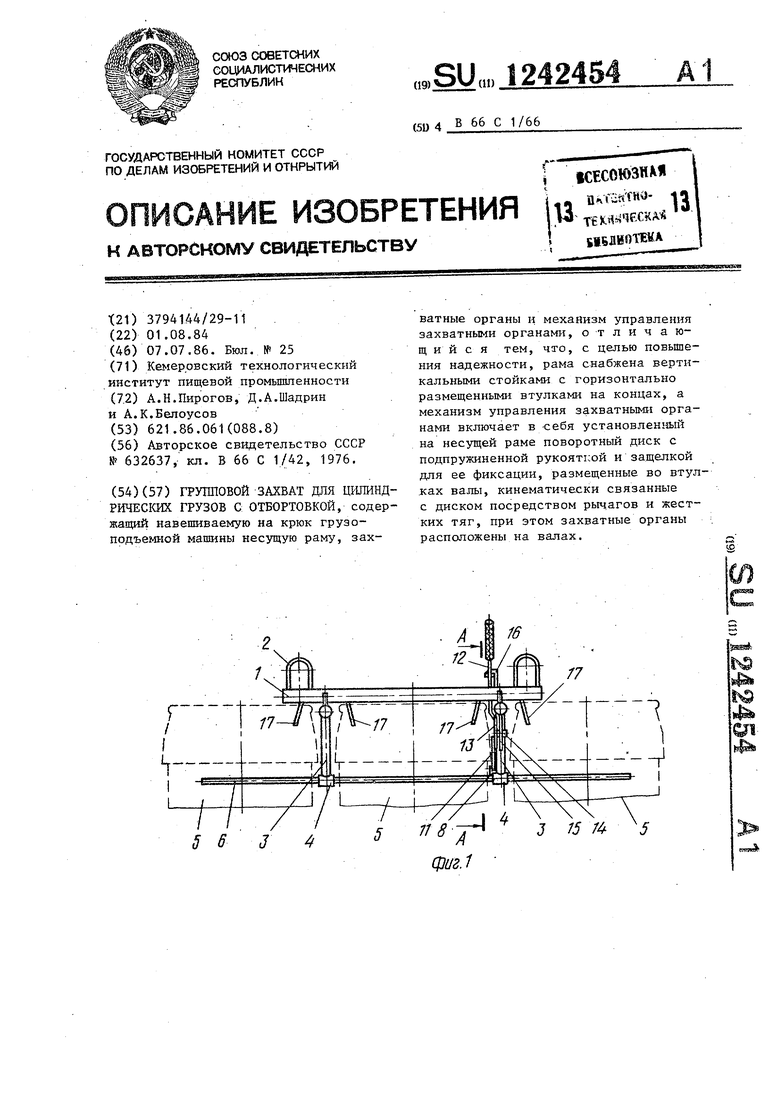
Групповой захват представлен для шести полиэтиленовых барабанов для транспортировки 20-литровых бутыпей с химреактивами. Он включает прямоугольную трубчатуй раму 1, сваренную из четырех труб, снабженную скобами 2 для навески на грузоподъемное устройство . Снизу к двум параллельным сторонам рамы приварены попарно вертикальные стойки 3 с горизонтальньми втулками 4 на концах с шагом, равным расстоянию между центрами грузов 5. Через каждую пару втулок 4 проходят валы 6, на которых закреплены захватные органы (профильные губки) 7, расположенные на всех валах попарно напротив друг друга с шагом, равным расстоянию между центрами грузов.
Поворот захватными органами 7 осуществляется с помощью механизма управления. К валам 6 приварены рычаги 8, которые посредством тяг 9-11 - соединены с рукояткой 12 (фиг. 3).
Рукоятка 12 размещена на диске 13, установленном на оси 14 на кронштейне 15, приваренном к раме 1. Кроме того, этот рычаг снабжен пружиной
(не показана), стремящейся перевести рычаг и связанные с ним губки 7 в открытое положение, и специальной запорной защелкой 16 (рукоятка 12 на фиг„ 2 условно не показана).
Для центровки грузов 5 относительно зажимных губок 7 к раме снизу приварены специальные штыри 17.
Групповой захват рабйтает следующим образом. .
При выводе рукоятки 12 из защелки 16 она пружиной поворачивается в крайнее положение до упора и с помощью тяг 9-11 рычагов-8 и валов 6 поворачивает губки в вертикальное положение. Затем захват накладывают на грузы,, расстояние между которь1ми должно быть 20-30 мм.
При этом специальные штыри 1 7 центрируют грузы относительно губок 7.После этого рукоятку 12 поворачивают до фиксации ее защелкой 15. При этом тяги 9-11 через рычаги 8 поворачивают валы 6, и губки 7 занимают горизонтальное положение. При этом продольные оси тяг 9-11 пересекаются на оси вращения рукоятки 12 (фиг. 3).Затем с помощью транспортного устройства захват с грузами за проупшны 2 транспортируется по назначению. Грузы на захват опираются выступающими частями. Освобождение захвата от груза производится в порядке, обратном описанному вьипе.
4 е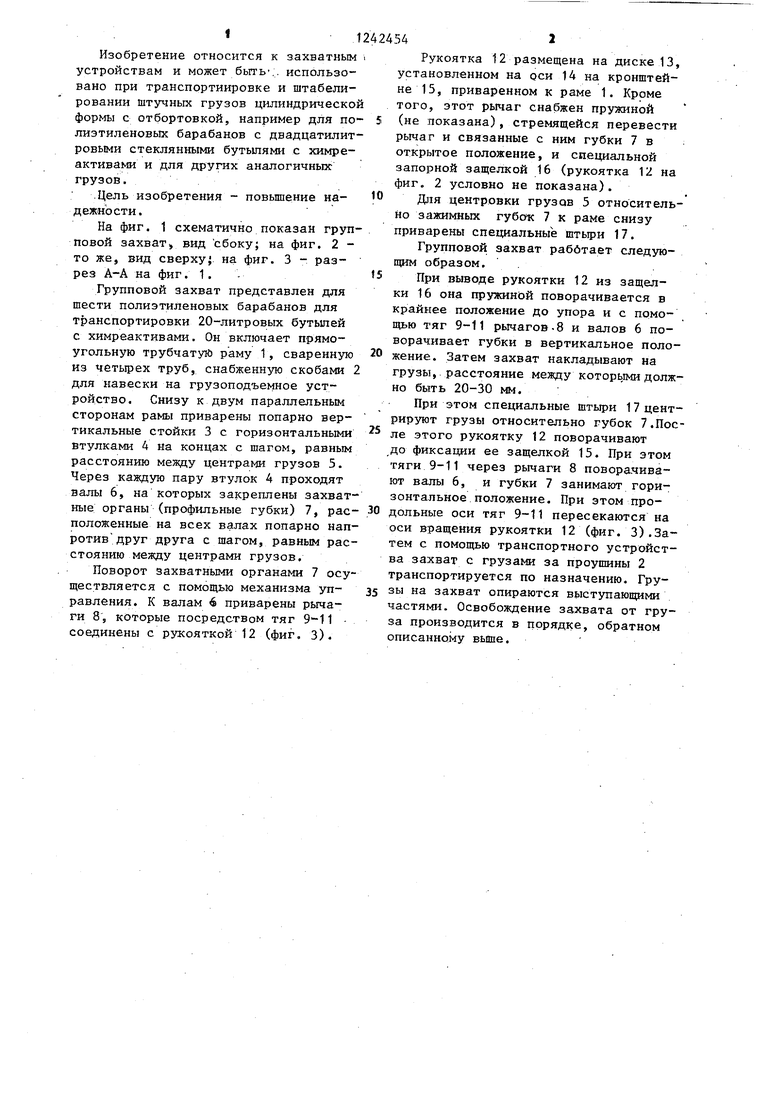
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для грузов с отбортовкой | 1990 |
|
SU1766820A1 |
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОЙ ОТТЯЖКИ ПОЛОТНА НА АВТОМАТИЧЕСКОЙ ТРИКОТАЖНОЙ МАШИНЕ, ПРЕИМУЩЕСТВЕННО ПЛОСКОВЯЗАЛЬНОЙ | 1992 |
|
RU2078861C1 |
| Автомат для подготовки проводов к монтажу | 1987 |
|
SU1457041A1 |
| Устройство для кантования изделий | 1990 |
|
SU1782877A1 |
| Захват-кантователь | 1987 |
|
SU1472411A1 |
| КРАН-ПЕРЕСТАНОВЩИК ДЛЯ ОБМЕНА ВАГОНЕТОК | 1970 |
|
SU282240A1 |
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Клещевой захват-кантователь | 1988 |
|
SU1594112A1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| Устройство для сортировки полупроводниковых приборов по электрическим параметрам | 1980 |
|
SU1014072A1 |
А-А
87 « 7 П Фиг
/-yyi
/ 77
Редактор В.Иванова
.Составитель О.Фотинич Техред О.Гортвай
Заказ 3661/23Тираж 799 Подписное
ВНИИПИ Государственного комитета СССР . ПО делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб,, д. 475
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор Г. Решетник
| Захватное устройство для группы цилиндрических предметов | 1976 |
|
SU632637A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
