(54) ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУППЫ ЦИЛИНДРИЧЕСКИХ ПРЕДМЕТОВ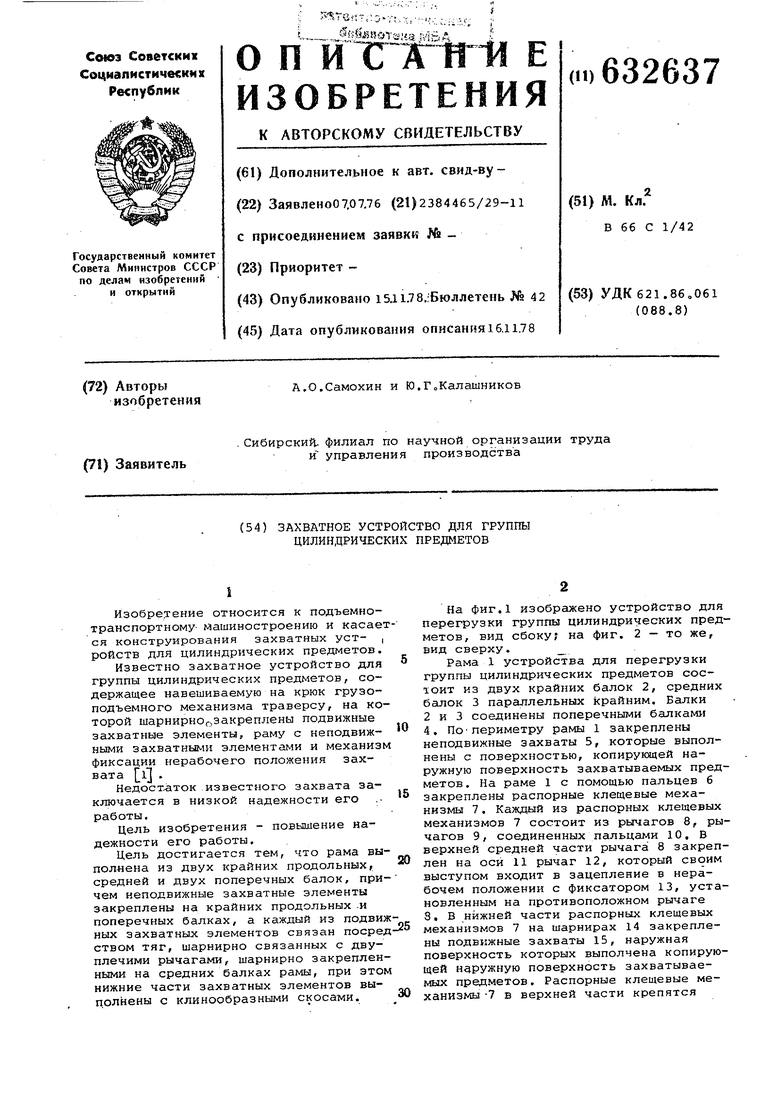
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ПОЛЫХ КОЛЬЦЕВЫХ ИЗДЕЛИЙ | 1971 |
|
SU302307A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| Установка для очистки и ремонта емкостей | 1987 |
|
SU1480903A1 |
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| Устройство для перегрузки конусов электронно-лучевых трубок с транспортера печи отжига | 1990 |
|
SU1839168A1 |
| Грузозахватное устройство | 1982 |
|
SU1066931A1 |
| Крановое захватное устройство | 1978 |
|
SU664905A1 |
| Устройство для продольной подачи бревен в пильный станок | 1978 |
|
SU1056884A3 |
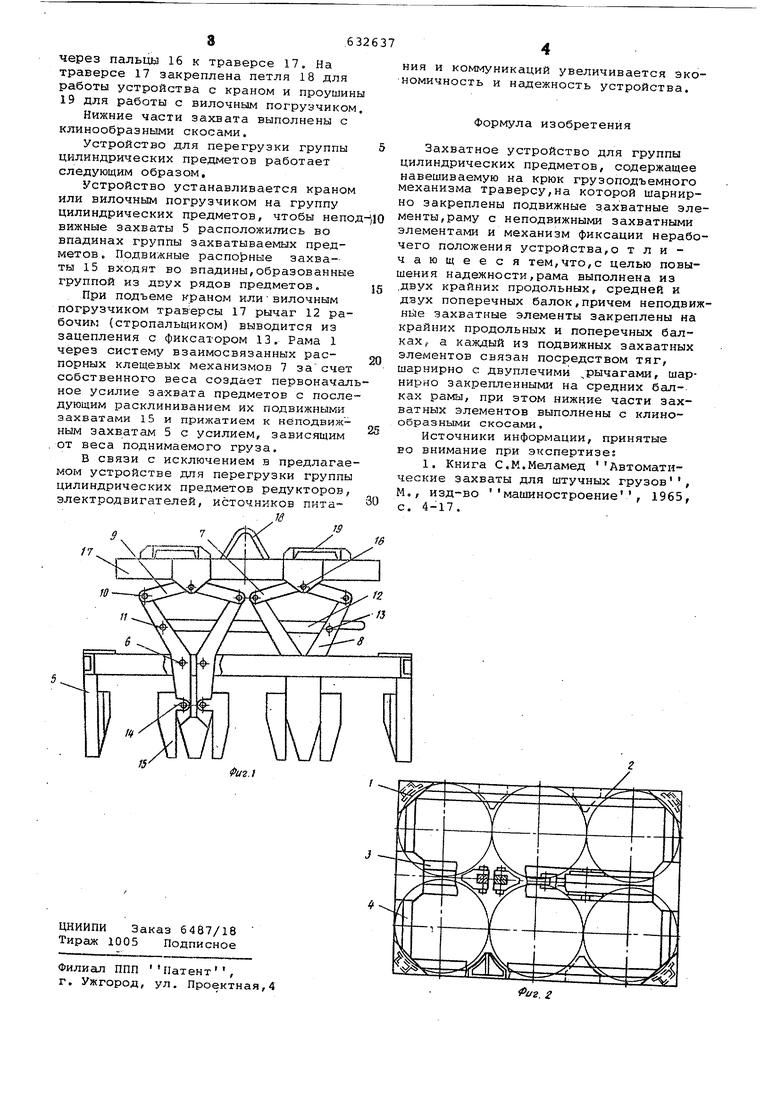
Изобретение относится к подъемнотранспортному- машиностроению и касае ся конструирования захватных устройств для цилиндрических предметов. Известно захватное устройство для группы цилиндрических предметов, содержащее навешиваемую на крюк грузоподъемного механизма траверсу, на ко торой шарнирнОоЭакреплены подвижные захватные элементы, раму с неподвижными захватными элементами и механиз фиксации нерабочего положения захвата ij . Недостаток известного захвата заключается в низкой Надежности его работы. Цель изобретения - повышение надежности его работы. Цель достигается тем, что рама вы полнена из двух крайних продольных, средней и двух поперечных балок, при чем неподвижные захватные элементы закреплены на крайних продольных .и поперечных балках, а каждый из подвиж ных захватных элементов связан посред ством тяг, шарнирно связанных с двуплечими рычагами, шарнирно закреплен ными на средних балках рамы, при это нижние части захватных элементов выдолнены с клинообразными скосами. На фиг.1 изображено устройство для перегрузки группы цилиндрических предметов, вид сбоку,- на фиг. 2 - то же, вид сверху. Рама 1 устройства для перегрузки группы цилиндрических предметов сосюит из двух крайних балок 2, средних балок 3 параллельных крайним. Балки 2 и 3 соединены поперечными балками 4. ПоПериметру рамы 1 закреплены неподвижные захваты 5, которые выполнены с поверхностью, копирукяцей наружную поверхность захватываемых предметов . На раме 1 с помощью пальцев 6 закреплены распорные клещевые механизмы 7. Каждый из распорных клещевых механизмов 7 состоит из рычагов 8, рычагов 9, соединенных пальцами 10, В верхней средней части рычага 8 закреплен на оси 11 рычаг 12, который своим выступом входит в зацепление в нерабочем положении с фиксатором 13, установленным на противоположном рычаге 8. В нижней части распорных клещевых механизмов 7 на шарнирах 14 закреплены подвижные захваты 15, наружная поверхность которых выполнена копирующей наружную поверхность захватываемых предметов. Распорные клещевые механизмы -7 в верхней части крепятся
