Изобретение относится к вычислительной технике и может быть использовано в составе быстродействующих вычислительных систем, предназначенных для управления динамическими объектами.
Целью изобретения является расши-/ рение функциональных возможностей
за счет решения систем обыкновенных нелинейных дифференциальных уравнений, в том числе, не разрешенных относительно производных от искомых функций времени.
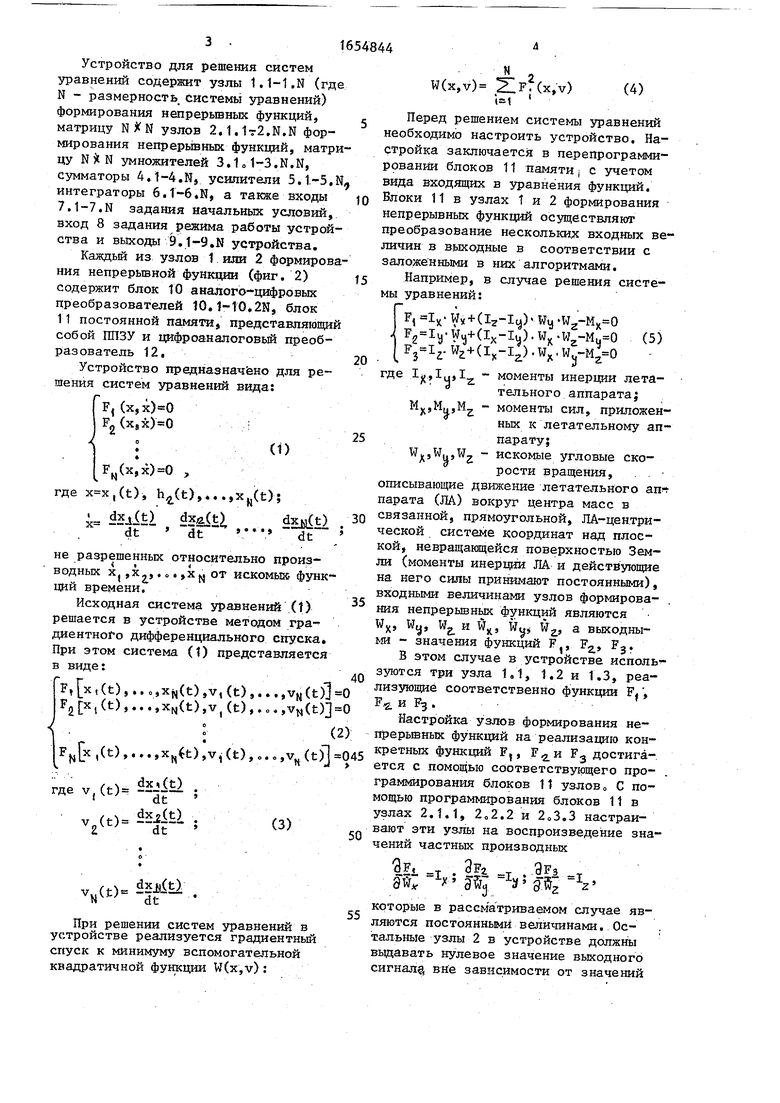
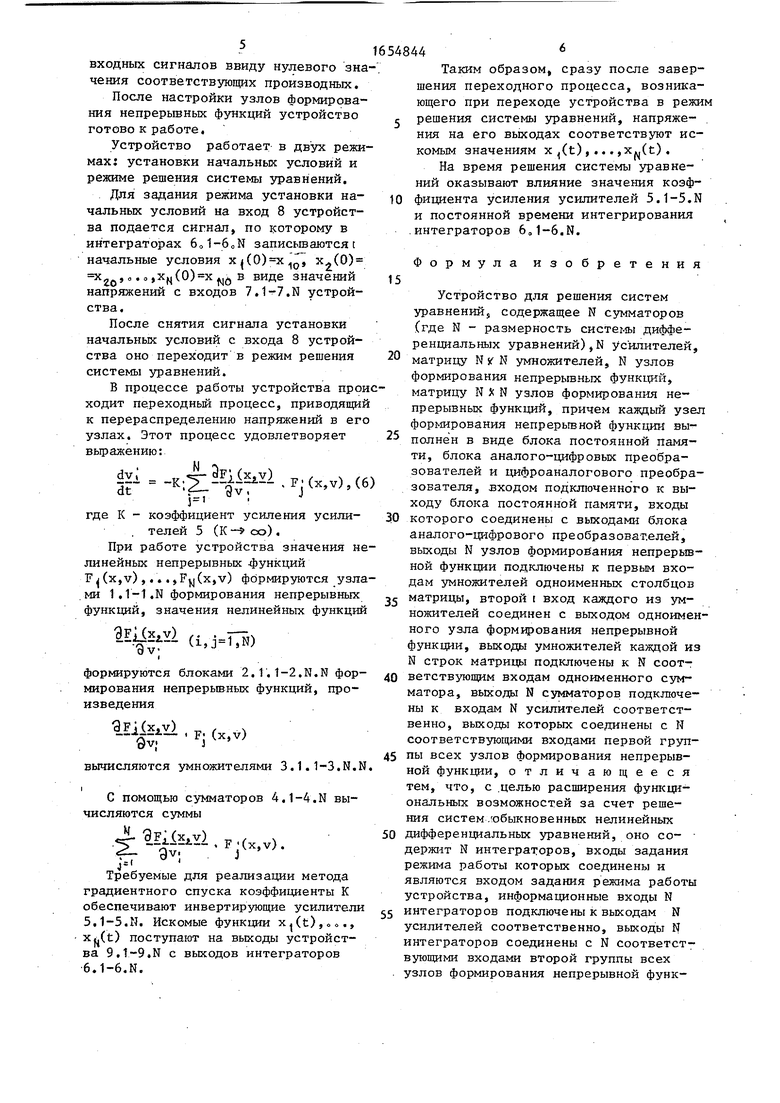
На фиг. 1 представлена схема устройства; на фиг. 2 - схема узла формирования непрерывной функции.
Устройство для решения систем уравнений содержит узлы 1.1-1.N (где N - размерность, системы уравнений) формирования непрерывных функций, матрицу NXN узлов 2.1.1т2.Ы.Ы формирования непрерывных функций, матрицу N % N умножителей 3.1„1-3.N.N, сумматоры 4.1-4.N, усилители 5.1-5.N,, интеграторы 6.t-6,N, а также входы 7.1-7.N задания начальных условий, вход 8 задания режима работы устройства и выходы 9.1-9.N устройства.
Каждый из узлов 1 или 2 формирования непрерьюной функции (фиг. 2) содержит блок 10 аналого-цифровых Преобразователей 10.1-10,2N, блок 11 постоянной памяти, представляющий собой ППЗУ и цифроаналоговый преобразователь 12.
Устройство предназначено для решения систем уравнений вида:
F, (х,х)0 F2(xax)0
(1)
FN(x,x)0 , ,(t), h,2(t),...,Xj1(t);
i dxjlti 2йЩ
x
dt
dt
йаыШ . 30
dt
не разрешенных относительно производных х(,х,,.о.,хN от искомы функций времени.
Исходная система уравнений (1) решается в устройстве методом градиентного дифференциального спуска. При этом система (1) представляется в виде:40
F,х, (t),..о,xN(t),v,(t),..., VH(t)1 0 ,(t),...,xN(t),v((t),.о,,vw(t) 0
о(2)
(t),...,xN4t),v1(t),..c,vH(t)045
, dxi(t) где v, (t) --j-- ;
(+)„ . (3
,u; dt , w/
ЧЈ-
При решении систем уравнений в устройстве реализуется градиентный
спуск к минимуму вспомогательной квадратичной функции W(x,v):
N
W(x,v) (x,v) (4)
Перед решением системы уравнений необходимо настроить устройство. Настройка заключается в перепрограммировании блоков 11 памяти, с учетом вида входящих в уравнения функций. Блоки 11 в узлах 1 и 2 формирования непрерывных функций осуществляют преобразование нескольких входных величин в выходные в соответствии с заложенными в них алгоритмами.
Например, в случае решения системы уравнений:
F, 1Х« Wv + ttz-Iy) Wy -WZ-MX 0 F2 Iy W«j+(Ix-Iu). WK -Иг-Мц 0 .W2-f(Ix-I2).
(5)
5
0
40
45
50
55
где 1,1и,1 M
XjM,rL
W
X VW2
моменты инерции летательного аппарата| моменты сил, приложенных к летательному аппарату;
искомые угловые скорости вращения, описывающие движение летательного аппарата (ЛА) вокруг центра масс в связанной, прямоугольной, ЛА-центри- ческой системе координат над плоской, невращающейся поверхностью Земли (моменты инерции ЛА и действующие на него силы принимают постоянными), входными величинами узлов формирования непрерывных функций являются
wx, wy,
Wg и W
Wq, Wg., а выходными - значения функций Р(, F2, F3,
В этом случае в устройстве используются три узла 1.1, 1.2 и 1.3, реализующие соответственно функции FJ , Fu и F3 .
Настройка узлов формирования непрерывных функций на реализацию конкретных функций Fj, F3 достигается с помощью соответствующего программирования блоков 11 узлово С помощью программирования блоков 11 в узлах 2.1.1, 202.2 и 2оЗ.З настраивают эти узлы на воспроизведение значений частных производных
F, - . 3F . 9F3 т ffi Vg Л
которые в рассматриваемом случае являются постоянными величинами. Остальные узлы 2 в устройстве должны выдавать нулевое значение выходного сигнал, вне зависимости от значений
входных сигналов ввиду нулевого значения соответствующих производных.
После настройки узлов формирования непрерывных функций устройство готово к работе.
Устройство работает в двух режимах: установки начальных условий и режиме решения системы уравнений.
Для задания режима установки начальных условий на вход 8 устройства подается сигнал, по которому в интеграторах 601-60N записываютсяt начальные условия х(0)х10, x(0) хго,, .o,xN(0)xNd в виде значений напряжений с входов 7.1-7.N устройства.
После снятия сигнала установки начальных условий с входа 8 устройства оно переходит в режим решения системы уравнений.
В процессе работы устройства проиходит переходньй процесс, приводящий к перераспределению напряжений в его узлах. Этот процесс удовлетворяет выражению:
--к.-Вшз) .Fj(x,vM6
dt
где К - коэффициент усиления усилителей 5 (К- со) .
При работе устройства значения нелинейных непрерывных -функций F (x,v),...,Fw(x,v) формируются узлами 1.1-1.N формирования непрерывных функций, значения нелинейных функций
) 3v:
(i,,N)
формируются блоками 2.1.1-2.N.N формирования непрерывных функций, произведения
н-г- Fi
вычисляются умножителями 3.1.1-3.N.N
i
С помощью сумматоров 4.1-4.N вычисляются суммы
(x v)Требуемые для реализации метода градиентного спуска коэффициенты К обеспечивают инвертирующие усилители 5.1-5.N. Искомые функции x,(t),.o., ) поступают на выходы устройства 9.1-9.N с выходов интеграторов 6.1-6.N.
Таким образом, сразу после завершения переходного процесса, возникающего при переходе устройства в режим решения системы уравнений, напряжения на его выходах соответствуют искомым значениям x(t),...,x(t).
На время решения системы уравнений оказывают влияние значения коэффициента усиления усилителей 5.1-5.N и постоянной времени интегрирования интеграторов 6.1-6.N.
Формула изобретения
Устройство для решения систем уравнений, содержащее N сумматоров (где N - размерность системы дифференциальных уравнений),N усилителей, матрицу N sf К умножителей, N узлов формирования непрерывных функций, матрицу N X N узлов формирования непрерывных функций, причем каждый узел формирования непрерывной функции выполнен в виде блока постоянной памяти, блока аналого-цифровых преобра5
0
0
зователей и цифроаналогового преобразователя, входом подключенного к выходу блока постоянной памяти, входы которого соединены с выходами блока аналого-цифрового преобразователей, выходы N узлов формирования непрерывной функции подключены к первым входам умножителей одноименных столбцов матрицы, второй i вход каждого из умножителей соединен с выходом одноименного узла формирования непрерывной функции, выходы умножителей каждой из N строк матрицы подключены к N соответствующим входам одноименного сумматора, выходы N сумматоров подключены к входам N усилителей соответственно, выходы которых соединены с N соответствующими входами первой груп5 пы всех узлов формирования непрерывной функции, отличающееся тем, что, с целью расширения функциональных возможностей за счет решения систем обыкновенных нелинейных
0 дифференциальных уравнений, оно содержит N интеграторов, входы задания режима работы которых соединены и являются входом задания режима работы устройства, информационные входы N интеграторов подключены к выходам N усилителей соответственно, выходы N интеграторов соединены с N соответствующими входами второй группы всех узлов формирования непрерывной функ
ции и являются выходами устройства, которого являются входы задания на- входами задания начальных условий чальных условий интеграторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для решения дифференциальных уравнений | 1985 |
|
SU1305728A1 |
| Самонастраивающаяся система управления | 1984 |
|
SU1171755A1 |
| Устройство для формирования сигнала управления с оптимальными коэффициентами обратной связи | 1984 |
|
SU1242913A1 |
| Система идентификации параметров линейных объектов | 1988 |
|
SU1534429A1 |
| Устройство автоматического регулирования перетоков активной мощности в энергосистеме | 1985 |
|
SU1275639A2 |
| Устройство для решения систем линейных алгебраических уравнений | 1985 |
|
SU1265810A1 |
| Устройство для решения систем дифференциальных уравнений | 1977 |
|
SU714406A1 |
| Устройство для решения диффе-РЕНциАльНыХ уРАВНЕНий B чАСТНыХпРОизВОдНыХ | 1979 |
|
SU842858A1 |
| Устройство для решения дифференциальных уравнений | 1983 |
|
SU1171815A1 |
| Устройство для решения систем дифференциальных уравнений | 1987 |
|
SU1476502A1 |
Изобретение относится к вычислительной технике и может быть использовано в составе быстродействующих систем, предназначенных для управления динамическими объектами. Цель изобретения - расширение функциональных возможностей устройства за счет решения систем обыкновенных нелинейных дифференциальных уравнений, в том числе не разрешенных относительно производных от исковых функций времени. Устройство содержит N узлов 1.1-1.N формирования непрерывных функций (N - размерность системы уравнений), матрицу N х N узлов 2.1.1-2.N.N формирования непрерывных функций, матрицу NX N умножителей 3.1.1-3.N.N, сумматоры 4.1-4.N, усилители 5, 1-5.N, интеграторы 6.1-6.N. Для решения систем уравнений в устройстве используется метод дифференциального градиентного спускаэ Устг ройство работает в двух режимах: установки начальных условий и решения системы уравнений. Переключение режима работы устройства осуществляется с помощью подачи сигнала на вход 8 задания режима работы. В режиме установки начальные условия в виде напряжений с входов 7o1-7.N записываются на конденсаторы интеграторов 6.1- 6.N. После переключения устройства в режим решения системы уравнений в нем происходит переходный процесс с невысокой постоянной времени, в результате которого на выходах 9.1-9.N устройства появляются напряжения, соответствующие искомому решению системы уравнений, 2 ил. о S (Л о СП Ј 00 Ь
Фиг
| Устройство для решения системОдНОРОдНыХ диффЕРЕНциАльНыХуРАВНЕНий | 1979 |
|
SU801005A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Грездов Г.И | |||
| Теория и применение гибридных моделей | |||
| --Киев, 1975, с | |||
| Шланговое соединение | 0 |
|
SU88A1 |
