1243867 2. Устройство по п.1, о т л и ч а- зажимных губок, выполненными в виде
ю щ е е с я тем, что оно снабжено ориентаторами заготовок относительно
подпружиненных стержней, смонтированных в зажимных губках.
i
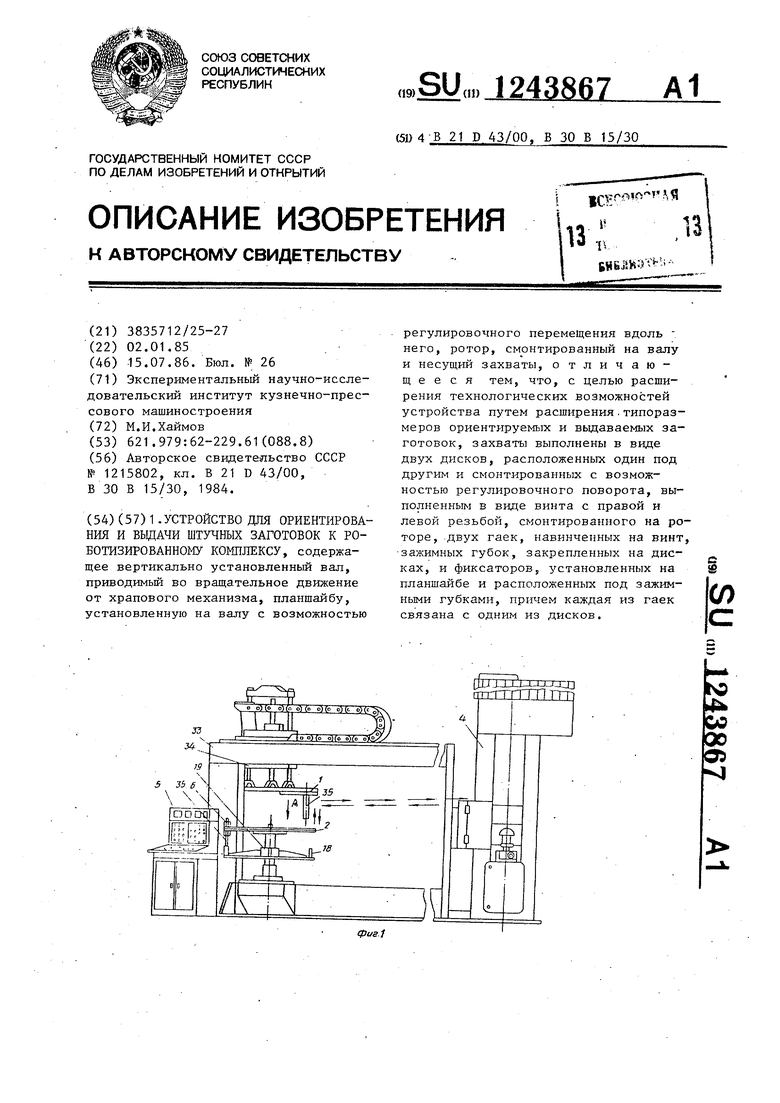
Изобретение относится к обработке металлов давлением и может быть использовано для ориентирования и выдачи штучных заготовок в роботизированных комплексах.
Цель изобретения расширение технологических возможностей устройства путем расширения типоразмеров ориентирумых и выдаваемых заготовок.
На. фиг,1 изображено предлагаемое устройство, общий вид , на фиг.2 - ви;д А на фиг.1; на фиг.З - разрез Б-Б на фиг.2; на фиг.4 - разрез Б-В на фиг.З; на фиг.З - разрез Г-Г на фиг.З; на фиг.6 - разрез Д-Д на фиг.Зо
Устройство установлено под рукой 1, содержит магазин 2 с приемными ячейками 3 и расположено у пресса 4, связанного системой 5 управления, и питания. Устройство содержит также захваты 6, совмещенные с приемными ячейками 3. Захваты 6 снабжены механизмом- 7 регулировки и ориентаторами 8. Механизм 7 содержит гайки 9 и 10, винт 11 с правой и левой резьбой, установленньй при помощи кронштейна 12 на роторе 13. На последнем смонтированы диски 14 и 15 с возможностью регулировочного поворота один относительно другого. Гайка 9 связана диском 14, а гайка 10 связана с диском 15. Захваты выполнены в виде зажимных губок 16 и 17, закрепленных на дисках 14 и 15 соответственно. Под губками 16 и 17 вертикально установлены фиксаторы 18, смонтированные на планшайбе 19, которая закреплена на валу 20 и связана фиксаторам 21 с гайкой 22, расположенной в по. лости 23 вала 20 на винте 24.
Привод позиционирования дополни- .тельных захватов 6 выполнен в виде силового цилиндра 25, шарнирно связанного с родилом 26, посаженным на вал 20 и снабженным подпружиненной собачкой 27, сопряженной с храповым
67 зажимных губок, выполненными в виде
подпружиненных стержней, смонтированных в зажимных губках.
колесом 28р посаженным на тот же вал 20. Со стороны противоположной ротору 13 вап 20 снабжен фрикционным тормозом 29, подпружиненные вкладьши 30
которого поджаты к крьшке 31 опорного стакана 32,, закрепленного на той же раме 33, что и каретка 34 руки 1, и жестко связанной с прессом 4. Губки 16 и 17 захватов 6 выполнены в виде
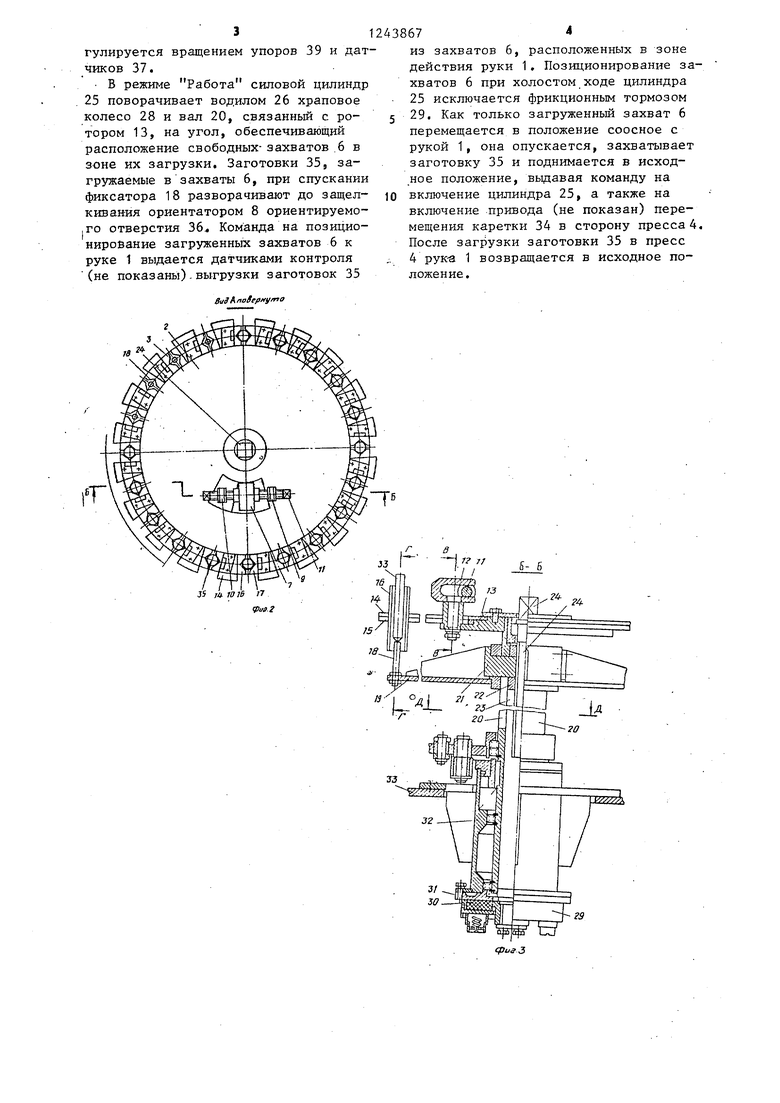
съемных призм, рассчитанных на типовые группы заготовок 35, различаемых, например, по форме ориентируемых отверстие. 36. Датчики 37 внешней информации для контроля и программирования положения захватов 6 закреплены на тех же кронштейнах 38, что и регулируемые упоры 39,
Устройство работает следующим об- разом.
Б режиме Наладка для случаев, когда требуется настройка на соответствующий диаметр подаваемых заготовок
35, врашеннем винта 11 обеспечивают встречное или противоположное перемещение га.ек 9, 10 и, следовательно, связанных с этими гайками дисков 14 и 15. При перемещении дисков 14 и 15
обеспечивается их разворот относительно оси ротора 13., при котором винт 11 перемещается в зеве кронштейна 12 в радиальном направлении. В зависимости от направления разворота дисков 14 и 15 все губки 16 и 17 захватов 6 синхронно сдвигаются или раздвигаются. Если захваты 6 требуется настроить на соответствующую длину за.готовок 35 или на расположение их ориентирующего отверстия 36 в определенной точке, поворотом винта 24 перемещают гайку 22 и связанную с ней фиксатором 21 планшайбу 19, обеспечивая подъем или опускание всех вертикальных фиксаторов 18 на величину расположения ориентирующих отверстий 36 против ориентаторов 8. Угол позиционирования захватов 6 ре
гулируется вращением упоров 39 и датчиков 37.
В режиме Работа силовой цилиндр 25 поворачивает водилом 26 храповое колесо 28 и вал 20, связанный с ротором 13, на угол, обеспечивающий расположение свободных- захватов .6 в зоне их загрузки. Заготовки 35, загружаемые в захваты 6, при спускании фиксатора 18 разворачивают до защел- киваиия ориентатором 8 ориентируемо|ГО отверстия 36 Команда на позицио- ниройание загруженных захватов 6 к руке 1 выдается датчиками контроля
(не показаны)- выгрузки заготовок 35
8a3f notepxyrto
из захватов 6, расположенных в зоне действия руки 1, Позиционирование захватов 6 при холостом ходе цилиндра 25 исключается фрикционным тормозом 29. Как только загруженный захват 6 перемещается в положение соосное с рукой 1, она опускается, захватывает заготовку 35 и поднимается в исход- .ное положение, выдавая команду на включение цилиндра 25, а также на включение привода (не показан) перемещения каретки 34 в сторону пресса 4. После загрузки заготовки 35 в пресс 4 рук-а 1 возвращается в исходное положение.
и
7
J5 Jl W1В П
fas. г
ff- б
гз
В- в
10
фиг 5
У7 32Д л повернуто
(риг 6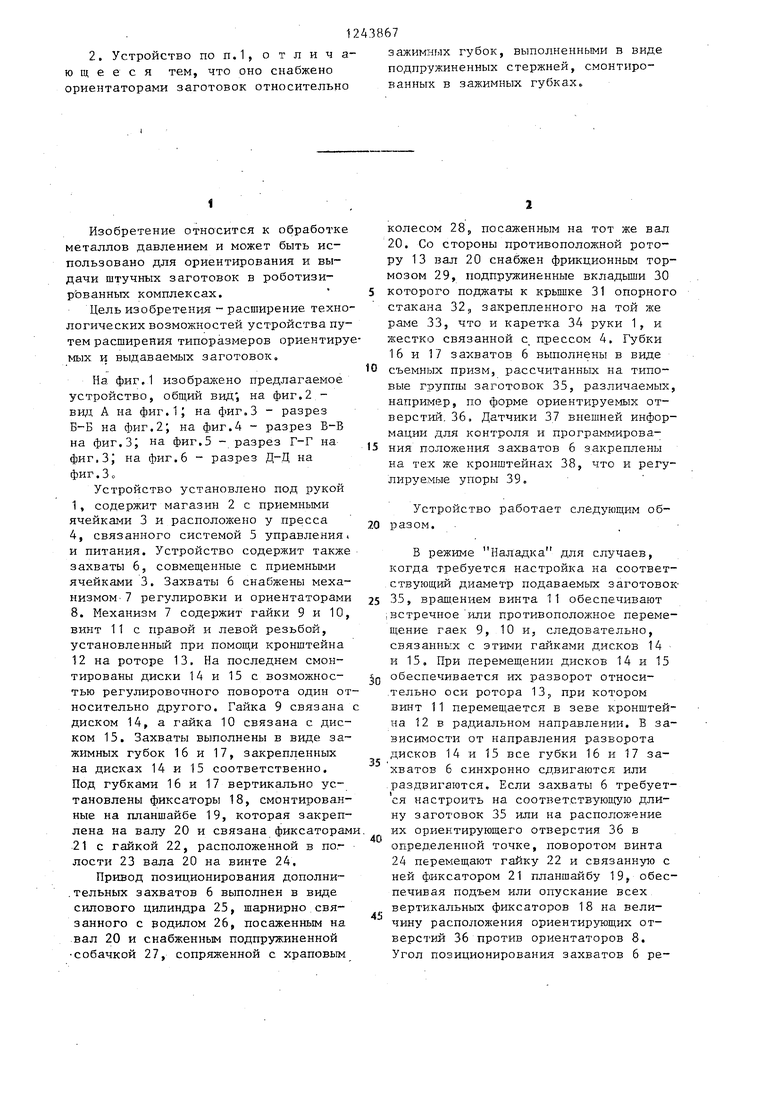
| название | год | авторы | номер документа |
|---|---|---|---|
| Полуавтоматический станок для совместной обработки грифа и корпуса музыкальных инструментов | 1986 |
|
SU1339016A1 |
| Устройство для обвязки бухт, механизм захвата и подачи бухт и механизм подачи обвязочного материала | 1989 |
|
SU1703560A1 |
| Устройство для перемещения заготовки | 1981 |
|
SU986549A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Автоматизированный пресс для объемной горячей штамповки заготовок | 1989 |
|
SU1804943A1 |
| Захватное устройство | 1984 |
|
SU1199614A1 |
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| Устройство для подачи длинномерного материала в рабочую зону пресса | 1987 |
|
SU1503948A1 |
| Гибкий производственный модуль для штамповки изделий из ленточного материала | 1989 |
|
SU1713709A1 |
| Манипулятор | 1981 |
|
SU1229031A1 |
| Устройство для накопления и выдачи стержневых заготовок | 1984 |
|
SU1215802A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
