2. .Судоподъемник по п. 1, о тл и ч а ю щ и и с я тем, что криво- линейность каждого участка определя ется формулой
. -д-. QC + -Р.п-х - F- . , вхп, n V7)Q.P.n(L-x)
л
де J t угол наклона пути противовеса в заданной точке;
Q ( - вес судовозной камеры;
Р - вес погонного метра тяговых канатов; .
п - ЧИСЛО тяговых канатов;
X - величина перемещения судоподъемника от X. « О до X
-Li , ;
F - усилие, необходимое для создания разгона (торможения);
f - коэффициент, учитывающий
сопротивления движению судоподъемник а ;
Q - вес противовеса в режиме его подъема;
Изобретение относится к гидротех- .ническому строительству, в частности к наклонным судоподъемникам.
По основному авт. ев, № 1000514 известен наклонный судоподъемник l. содержащий полущлюзы верхнего и нижнего бьефов-, расположенные между полушлюзами наклонные судовозные пути на которых установлена судовозная камера, связанная трособлочной систе- .мой с приводом и с противовесами, .установленными на дополнительных наклонных путях, уложенных параллельно судовозным путям, наклон верхнего участка путей противовесов превьщ1ает уклон судовозных путей, а наклон нижнего участка путей противовесов мень- ще уклона .судовозных путей,- угол наклона путей противовесов на верхнем участке определяется формулой: Ъ
Sin о( «:+ , (о Л
L - расстояние подъема (длина
судовозных путей); оС - угол наклона судовозных пу-,
тей,
3. Судоподъемник по п, 1, от- шающийся тем, что профивсех трех участков путей противоов определены как дуги радиуса
р. - 360 ы - ЩГ
L , - длина хорды соответствующего участка;
- центральный угол дуги соответствующего участка, определяемый по формуле
п /Kl-J «HL,
н1 - угол наклона профиля в начале соответствующего участка;
&KL угол наклона профиля в конце соответствующего участка.
а на нижнем участке - формулой:
sin оС sin 0.CUCT
9
(2)
.Ь где oCj
н
5
0
угол наклона путей противо- весов на верхнем участке; то же, на нижнем участке; вес системы камера - ка- наты-противовес; вес противовесов; ускорение камеры при раз- гоне и торможенииС9,81 м/сvj ускорение камеры при разгоне и торможении; угол наклона путей камеры и путей противовеса на среднем участке.
Недостатком известного судоподъёмника является низкая экономичность,
Цель изобретения - повышение экономичности судоподъемника.
, - GCHCT
Gn g
0(1
Поставленная цель достигается тем, что в наклонном судоподъемнике,, содержащем ползпилюзы верхнего и нижнего бьефов, расположенные между полушлюзами наклонные судовозные пути, на которых установлена судовозная камер.-., связанная трособлочной системой с приводом и с противовесами, установленньми на дополнительных наклонных путях, уложенных параллельно судовозным путям, наклон верхнего участка путей противовесов превышает уклон судовозных путей, а наклон нижнего участка путей противовесов меньше уклона судовозных путей, угол наклона путей противовесов на верхнем участке определяется формулой (1), а на нижнем участке - формулой {2), каждьй из трех сопряженных между собой участков дополнительных наклонных путей противовесов выполнен криволинейным.
Криволинейность каждого участка определяется формулой:
.
Sin
. Qc + P.n.x - F , , (Uf)Q + P-n(b-x)
де Jbl - угол наклона пути противовеса в заданной точке;
Qe - вес судовозной камеры;
Р - вес погонного метра тяговых канатов;35
п - число тяговых канатов;
X - величина перемещения судоподъемника от х О до X L;
F - усилие, необходимое для соз-4Р Дания разгона (торможения);
f - коэффициент, учитывающий
сопротивления движению судоподъемника;
Q - вес противовеса в режиме 45 его подъема;
L - расстояние подъема (длина
судовозных путей); оС - угол наклона судовозньпс путей. .50
Кроме того, профили всех трех частков путей противовесов опредеены как дуги радиуса
KV
360 Lk 2T.
55
(4) QO sinoC + Pnx.sinoC +
/+ Pn(L-x). . + fQ sinft- + FsinoC, i
(6)
. .4
длина хорды соответствующего участка;.
центральный угол дуги соответствующего участка, определяемый по формуле
(fl KU
(5)
,
10
t5
20
25
30
35
4Р
45
50
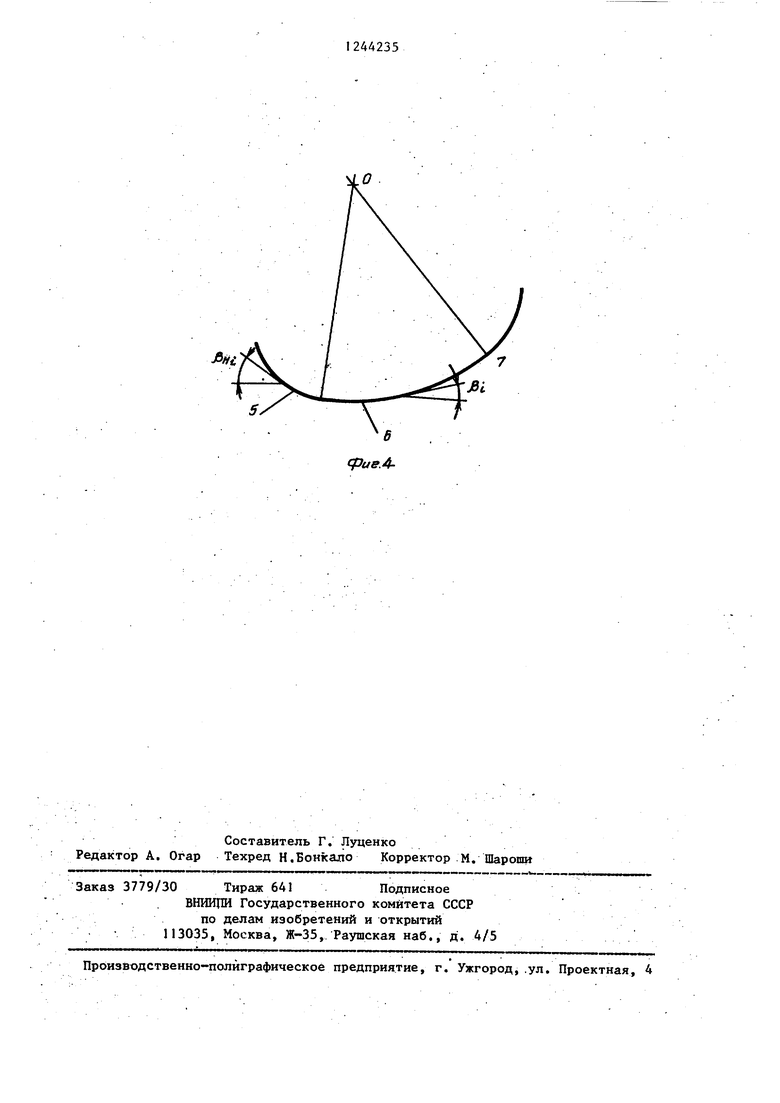
где fbni. угол наклона профиля в начале соответствующего участка; fbici. угол наклона профиля в конце соответствующего участка.
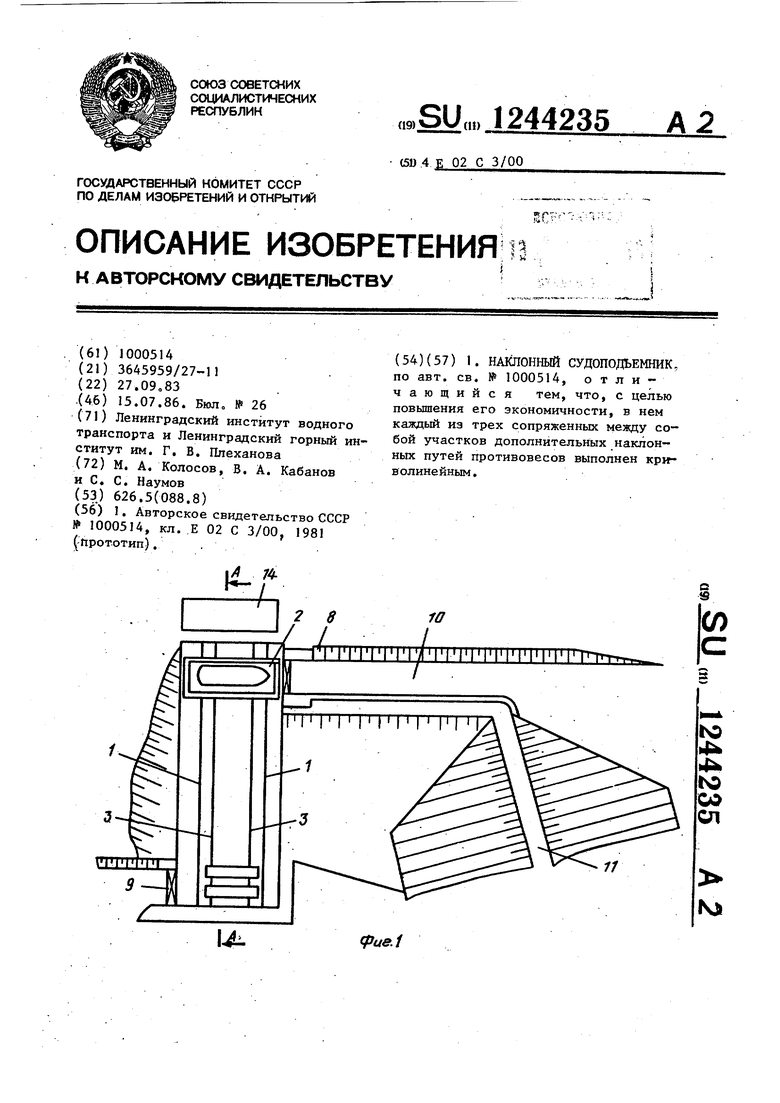
На фиг. 1 изображен судоподъемник, вид в плане; на фиг. 2 - схема усилий для перемещения камеры; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - кри- криволинейный профиль путей противовесов.
Наклонный судоподъемник состоит из наклонных судовозиых путей 1 с установленной на них судовозной камерой 2. В промежутке между судовозньст путями проложены пути 3 противовесов, . на которые установлены противовесы 4. Пути 3 противовесов состоят из нижнего 5, среднего 6 и верхнего 7 участков . Со стороны верхнего бьефа к камере 2 примыкает полушлюз 8, а со стороны нижнего бьефа установлен полу- шлюз 9. К полущлюзу 8 приьшкает верхний канал 10. Позицией 11 на фиг. 1 обозначена плотина.
i Камера 2 и противовес 4 соединены канатами 12, перекинутыми через шкивы 13 канатных машин, установленных в помещении 14., /
Для обоснования криволинейного |профиля путей 3 рассмотрим случай опускания камеры 2 по путям от полу шлюза 8. При этом противовесы 4.под- нимаются по путям 3 (фиг, 2).
Усилие, необходимое для перемещения судовозной камеры в начальньй . период, должно обеспечить статическое уравновешивание ветви противовеса, преодолеть сопротивление трения в опорах и создать дополнительное усилие, необходимое для обеспечения ускоренного движения
где Qj; - вес судоврзной камеры; ( угол наклона судовозных путей; Р - вес погонного метра тяговых
канатов;
п - число тяговых канатов; Q - вес противовеса; Ai. - угол наклона пути противовеса в заданной точке; L - расстояние подъема; X - величина перемещения судоподъемника от X О до X L;
f - коэффициент, учитьшающий
сопротивления движению су- доподъемника;
F - усилие,. необходимое для разгона (торможения).
После преобразования вйражения (6) и решения его относительно Sin получаем формулу (З).
Формула (3) для определения профиля пути позволяет исходя из определенного ускорения (замедления) при известной массе камеры, противовесов и канатов и, следовательно, известной силы F ma, вызьюающей ускоренное (замедленное) движение, построить участки криволинейного профиля (при F 0 - участок ускорен- .ного движения; при F О - участок равномерного движения; при - участок замедленного движения)при этом учитываются и силы сопротивле- .ний движению..
Участок 7 замедления при подъеме противовеса становится участком. уск рения при его спуске, а участок ускорения - участком замедления..
Криволинейный профиль каждого участка может быть определен как дуга радиуса по формуле (4).
Центральный угол дуги данного учстка (fi, определяют по формуле (5).
Сравнительный расчет углов наклона по заданным точкам профиля по формуле (З) и углов наклона дуги 5 постоянного радиуса, определяемого по формуле (4) для тех же тачек, дает погрешность около 1%, что явля. ется допустимым для практических раС четов, а применение дуг постоянного
10 радиуса упрощает сооружение криволинейного профиля и контроль при ук- лад ке рельсовых путей.
Судоподъемник работает следующим /Образом.
15 Судовозная камера 2 установлена в районе полущлюза 8 верхнего подходного канала Ю. Из верхнего бьефа в камеру 2 входит судно. Закрьшаются затворы полушлюза 8 и камеры 2, Спя20 мается контурное уплотнение полупипо- за 8. Включаются двигатели канатных машин. Система камера - канаты - противовес начинает разгон. Так как длинная ветвь канатов опущена в сто-
25 рону противовесов 4, а последние расположены на криволинейных участка 5, уклон которых более пологий, чем уклон путей 1 камеры .2, то система камера - канаты - противо
30 вес находится в разновесии. При движении камеры 2 вниз, а противовесов 4 - вверх постепенно увеличивается угол наклона J5l путей противовесов. Бол ее интенсивное изменение угла pi
35 происходит на участке 5 разгона и участке 7 торможения, а менее интенсивное изменение - на участке 6 равномерного движения.
40 При выходе противовесов 4 на верхний участок 7 криволинейного пути 1 изменяется в сторону увеличения более интенсивно, что приводит к торможению . системы и остановке камеры 2 в районе 45 полупшюза 9 нижнего бьефа.
Предлагаемое конструктивное вьтол- нение наклонного судоподъемника позволяет повысить его экономичность.
Qft/y sifrJ L
f csindi
cpus.2

| название | год | авторы | номер документа |
|---|---|---|---|
| Наклонный судоподъемник | 1984 |
|
SU1227766A1 |
| Наклонный судоподъемник | 1981 |
|
SU1000514A1 |
| Наклонный судоподъемник | 1979 |
|
SU896176A2 |
| Наклонный судоподъемник | 1983 |
|
SU1193232A1 |
| Наклонный судоподъемник | 1986 |
|
SU1350245A1 |
| Наклонный судоподъемник | 1982 |
|
SU1082900A1 |
| Наклонный судоподъемник | 1979 |
|
SU861469A1 |
| Наклонный судоподъемник | 1985 |
|
SU1285111A1 |
| Наклонный судоподъемник с поперечным перемещением судов | 1980 |
|
SU894056A2 |
| Наклонный судоподъемник | 1981 |
|
SU1004523A1 |
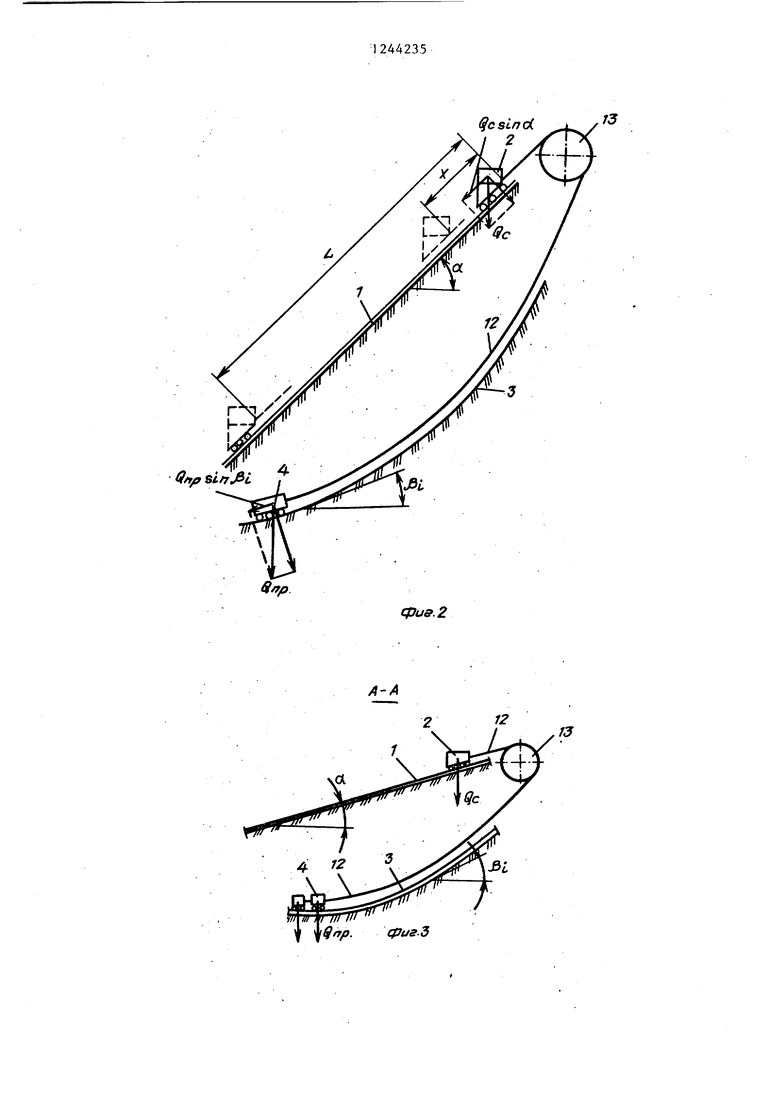
1/tp. фиг.З
Составитель Г. Луценко Редактор А. Огар Техред Н.Бонкало Корректор М.Шароши
Заказ 3779/30 Тираж 641 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.- LI, -II. и . . . I
Производственно-полиграфическое предприятие, г. Ужгород,.ул. Проектная, 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Наклонный судоподъемник | 1981 |
|
SU1000514A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| . | |||
