Изобретение относится к машине- Устроению, а именно к роботам и манипуляторам предназначеннык для обслуживания различных технологических процессов.
Цель изобретения - создание схва-- ;та с приводомэ обеспечивающим беэу- |дарность зажима (т,.е, плавность рабо |ты охвата) наряду с повьш1енным бьют- родействием. и при снихсении энергопотребления
На чертеже изобразкека кинематичес.- |кая cKet-ia привода схвата ; Схват робота содержи.т .;.снование 11, в направляюпрсс которого размещены |неподвижная 2 и подв -ш:ная 3 губкк, |Губка 2 может быть либо неподв 1ЖЕоЙ5 |йак это показано на ч&ртеже (с регу- |Лируемым местом установки) либо под- |г1ружР ненной относительно основания 1 . упомянутьми г-убкзми 2 и 3 зажимается деталь 4. Схват снабжен Также подвижной инеругюйной массой JS, взаимодействующей с подвилсной туб |Кой 3 через упругий злемент 6 уста- нозленньн с одной стороны от этой |Массы 5. С другой стороньз от упомя- нятой массы 5 расположен дополнит&г ь- нь5 -( З пругкй злемент 7., огшра: о1дийся |на основание 1 (или на его выступ 8) Подвижная инерщ-юнкал масса 5 снаб- кена механизмам ее фиксащ1И относи- Стельно неподвижной губки 2 (или основания 1) j, вьшолненнь М в виде защелок 9 и 10, размещенных, на подвилс :кой массе 5 и взаимодействующих (прк 1назсояодении упомянутой массы 5. в свои: ;кр5йних положениях) с отвятньми sa- :щелками 11 и 12, соответственно ноложенныг-и- на основ аш«т. ., При по меньшей мера одну из ваш,елок 13 (тур 1-оторая соответствует распол.ол(е ншо взаимодействия подвижной 5 с подви етгой губкой 3) целасообра5Но выполнить гребенчатой - с рядом греб ней. Аналогичным образом ;ушгут быть вьшолнены и защелки 12,. Кроме того, ц-елесообразно подвижнзта ияерционыузо массу 5 снаб,цить пр йводом ее перемещения (не показан) между упомяку- тьзми группа -ш залделок- 9з 11 и lOst..
Схват робота работг ет ОледуюпгйМ образом.
Перед качалок работы БЗВОДНТСЕ механизм привода схзата посредством перемещения ПОДЕРШКОЙ инерционной массы 5 (с соответстБуан(им сжатием дополнител:оного упругого элемента 7)
250802
до срабатывания защелки 1U с соответствующей защелкой 12. Взвод пружины 7 может быть осуществлен либо опера торомS либо посредством привода перемещения подвижной инерционной массы 5,
При поступлении ко1«1анды от системы управления на захват детали 4,
|ц к последней подводлтся схват робота таким образом,, что деталь 4 оказывается между губками 2 и 3 охвата,причем неподвижная губка 2 вплотную прижимается к детали 4. Затем осво15 бож; ается подвижная масса 5 (расцепляются защелки 10 и 12 механизма фиксации) , которая начинает двигаться под действием силь сжатия дополнительного упругого элемента 7. Затем
20 подвижная губка 3 упирается в непод- вг-окную деталь 4 и останавливается, а подвижная инерционная масса 5 продолжает движение, сжимая упругий зла- 6 о Сжатие элемента 6 осуществ- 25 ляется до тех пор5 пока запасенная им в процессе этого сжатия потенциальная энергия не будет равна (в идеальном случае) кинетической энергии движения ПОДВШ5КОК инерционной
jf) массы 5f которая, в свою очередь, равна потенщ1апьной знерх-ии упругого элемента 7 (во взведанном состоянии)- Движению подвижной инерционной массы 5 в обратном напрязлении препятству- ,,. ВТ срабатывание защелок 9 и 13 в .мент останова массм 5. Таким образом,
усилие залшма детл7И 4 опре.,целяется ; нас.тройкой .с расположения
защгшок 9, 13 и i j, 12, Освобождение
,v детали 4 осуЕКг-;. ( нл.кется после соответствующей командьь;. :;.С Гда раз,мьп-са отся заа5елки 9 и 13 :i и.йрекещается подвижная инерционная нйсса 5, з результате чего сйшмается (взводится), упругий
... элемент 7 и срабатывают защелки 10 , , „
н 1л, Привод перекещенкя, 1;оторь&{
снабжена подвижная инерционная масса 5 5 слу/KJiT в данной конструкцкн лишь для компенсаини д.чссипации знер- гии в сие теме J а .повьшение бБДСтродей° - ствия и плавности работы сквата., на- ргду с сокращением знергозатрат. обес- г-ачивается упругими элементшли 6 и 7 5 гкеремещаюарни подвижную инерьщон- ку.ю массу 5, Посгоянстэо усхшия sa
жима обеспечиваете. : наличием гребенчатой 3ащелкн 13.
Та.ким образокS схаат ггредлагае- мо.й конструкуднк обеспс чивает быстрый
314250804
и плавный захват (.и зажим) деталей и снабжена механизмом ее фиксации на различного диаметра с постоянным уси- ос-товании. лием при минимальном расходе энергии. 2. Схват по п. 1, о т л и ч а ю; и и с А тем, что механизм фиксации Формула изобретения сщвижной инерционной массы выполнен
в Еиде залделок, установленных на под1. Схват робота, содержащий осно- зижной . а ответные части на вание, зажимные губки, по меньшей с-танине с возможностью фиксации мере одна из которых вьшолнена под- .-ю инарционной массы в крайних положе- вижной и снабжена приводом ее переме- никх.
щения, включающим упругий элемент, 3. Схзат по пп. 1 и 2, о т л и- отл и чающийся тем,, что, чающий :i я тем,с что, с целью г. целью повьпяения быстродействия и о5еспечен:1Я постоянства усилия зажи- плавности работы схвата наряду с одно-15 ма деталей разного диаметра, зацел- временным снижением энергозатрат,при- ки выполнена гребенчатыми, вод перемещения снабжен подвижной
инерционной массой и дополнительным 4. Схват по п. 1, о т л и ч а - угфугим элементом, при этом подвиж- ю щ и и с я тем, что подвижная инер- ная инерционная масса размещена меж- 20 ционная масса снабжена приводом ее ду упомянутыми упругими эламентаьш перемещения.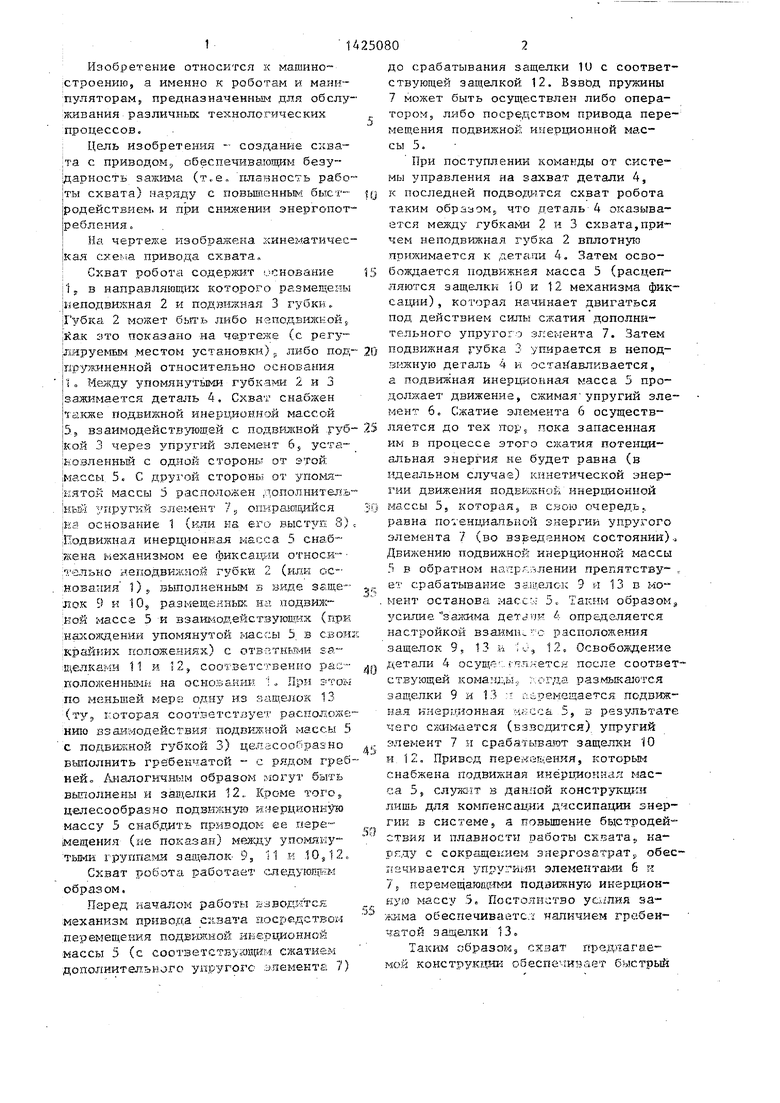

| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| Схват промышленного робота | 1977 |
|
SU662344A1 |
| Схват | 1981 |
|
SU952581A1 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Схват для сборки радиодеталей | 1979 |
|
SU812568A1 |
| МОДУЛЬ РОТАЦИИ | 2000 |
|
RU2176951C1 |
| Схват | 1983 |
|
SU1138313A1 |
| Рука промышленного робота | 1983 |
|
SU1225781A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Схват для сборки деталей | 1983 |
|
SU1127738A1 |
Изобретение относится к машиностроению, а именно к роботам и манипуляторам, предназначенным для обслуживания различных технологических процессов. Цель изобретения - создание охвата с приводом, обеспечивающим безударность зажима, т.е. плавность работы схвата, наряду с повышенным быстродействием и при снижении энергопотребления. Устройство содержит основание 1, в направляющих которого размещены неподвижна губка 2 и подвижная губка 3. Охват снабжен 4f 3 / подвижной инерционной массой 5, взаимодействующей с подвижной губкой 3 через упругий элемент 6, установленный с одной стороны от этой массы 5. С другой стороны от массы 5 расположен дополнительный упругий элемент 7. Подвижная инерционная масса 5 . снабжена механизмом фиксации ее край них положений, вьтолненным в виде защелок 9 и 10 на массе 5 и взаимодействующих с ответными защелками , 1 и 12, Перед началом работы взводится механизм привода схвата посредством перемещения инерционной массы 5 до срабатьгаания защелки 10 с защелкой 12. Деталь 4 располагается между губками схвата 2 и 3. Освобождается подвижная масса 5, которая под действием силы сжатия пружины 7 начинает двигаться. Подвижная губка 3 упирается в деталь 4 и останавливается, а подвижная масса 5 продолжает движение, сжимая пружину 6 до срабатывания защелок 9 к 13, Постоянство усилия зажима деталей различного диаметра обеспечивается наличием гребенчатой защелки 13. 3 з.п. ф-лы, 1 ил. 5 7 в L -- / -L i СЛ ГС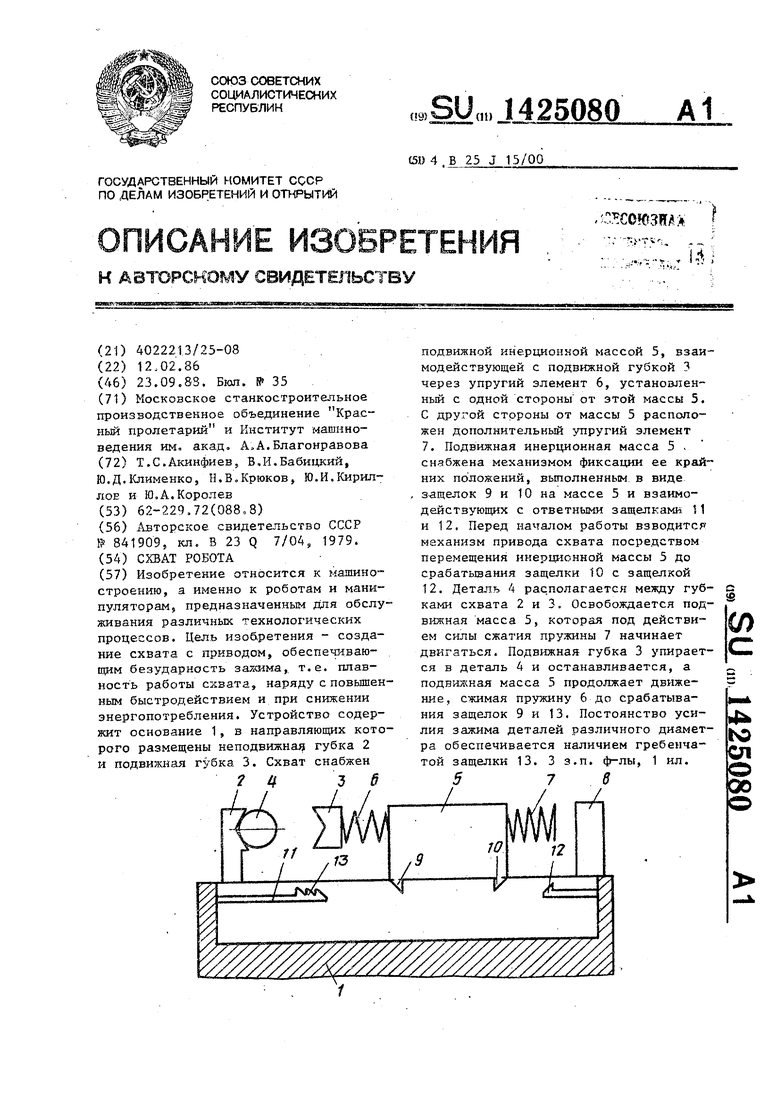
| Загрузочное устройство | 1979 |
|
SU841909A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
