Изобретение относится к промышленному транспорту, а именно к полочным элеваторам.
Целью изобретения является повышение надежности.
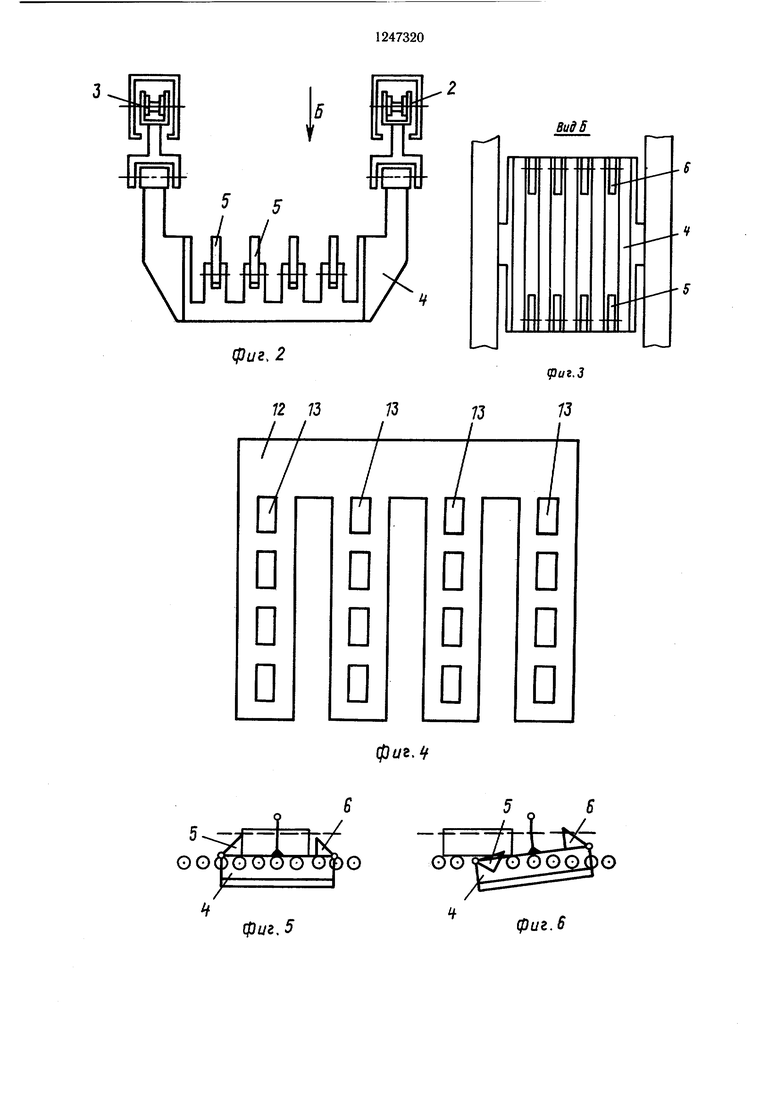
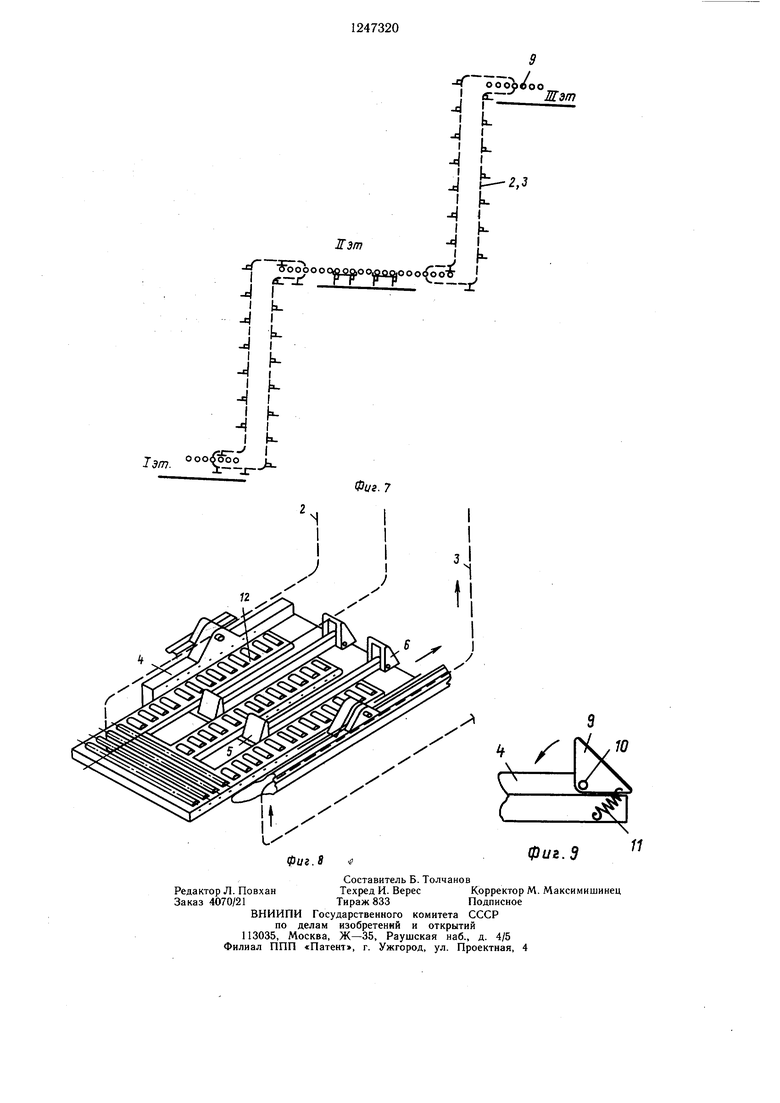
На фиг. 1 изображен полочный элеватор, обший вид; на фиг.2 - грузонесушая платформа, вид-спереди; на фиг.З - вид Б на фиг.2; на фиг.4 - погрузочно-разгрузоч- ный роликовый конвейер, вид сверху; на фиг.5 - положение грузонесушей платформы в момент захвата груза, вид сбоку; на фиг.6 - положение грузонесущей платформы в момент, когда груз не захвачен; на фиг.7 - схема передачи груза между этажами; на фиг.8 - аксонометрия платформы и погрузочно-разгрузочного роликового конвейера в сборе; на фиг.9 - установка упоров на грузонесуш,ей платформе.
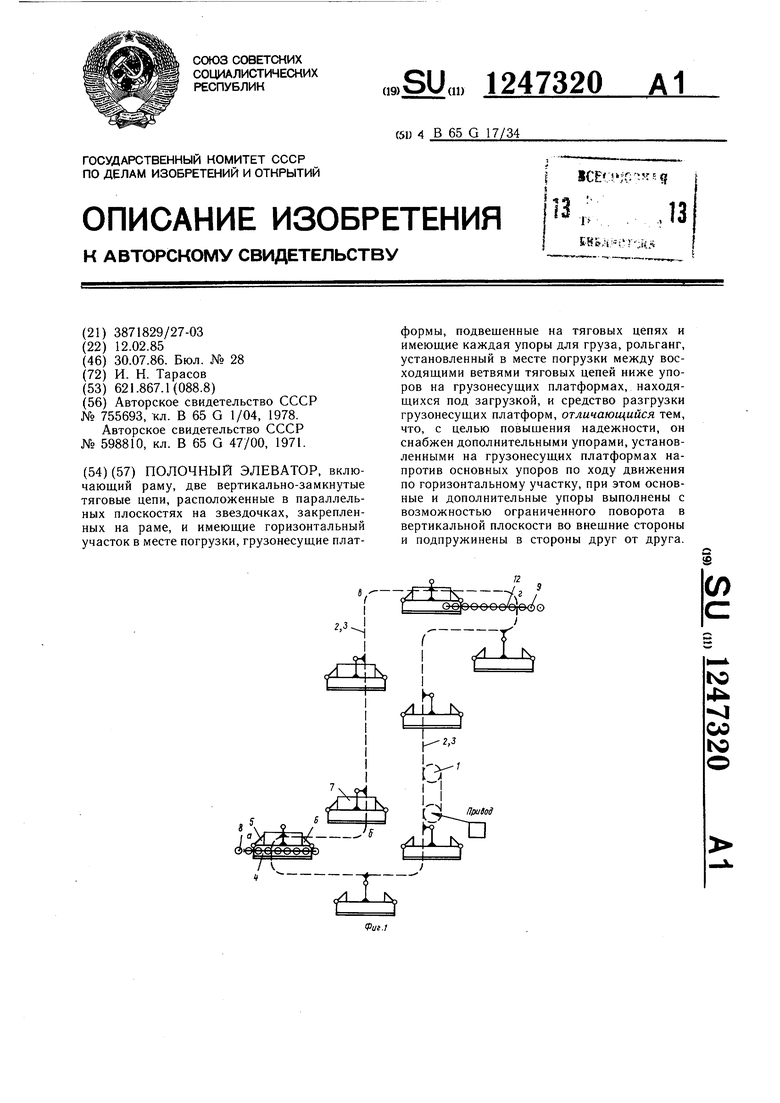
Полочный элеватор содержит привод 1 для двух вертикально замкнутых тяговых цепей 2 и 3, распол оженных в параллельных плоскостях на звездочках (не показаны), закрепленных на раме (не показана), и имеюш.их горизонтальный участок в месте погрузки, грузонесуш,ие платформы 4, подвешенные на тяговых цепях 2 и 3 и имеющие каждая основной и дополнительный упоры 5 и 6 для груза 7, приводные по- грузочно-разгрузочные рольганги 8 и 9, установленные .в местах погрузки и разгрузки между восходяш,ими и нисходяшими ветвями тяговых цепей 2 и 3. Грузонесушие платформы 4 выполнены с продольными гребнями, на которых установлены основные и дополнительные упоры 5 и 6, причем дополнительные упоры 6 установлены напрртив основных упоров 5 по ходу движения грузо- несуш,их платформ по горизонтальному участку. Упоры 5 и 6 установлены на шарнирах 10 и выполнены ограничено поворотными в вертикальной плоскости во внешние стороны и подпружинены посредством пружины 11 в стороны друг от друга. Рамы 12 погрузоч- но-разгрузочных рольгангов 8 и 9 выполнены гребенчатыми с закрепленными на гребнях роликами 13. Привод 1 элеватора выполнен реверсивным.
Груз 7 приводным погрузочно-разгрузоч- ным рольгангом 8 подается в зону прохода грузонесущей платформы 4. Последняя с нижней ветви тяговых цепей 2 и 3 поднимается в направлении погрузочно-разгрузочного рольганга 8. Затем грузонесушая платформа 4 движется вдоль него, не поднимаясь над ним, а упоры 5 и 6 проходят через пазы рамы 12 рольганга 8 и движутся над ним. При движении грузонесущей платформы 4 на горизонтальном участке дополнительные упоры б своими скосами находят па груз и, преодолевая усилия пружины И, поворачиваются на шарнире 10 и проходят под грузом 7. После прохождения под грузом 7 упоры б под действием пружины 11 поворачиваютя до упора в исходное положение. Основные упоры 5 проталкивают груз 7 по рольгангу 8 до тех пор, пока груз 7 не оказывается на грузонесушей платформе 4, что соответствует ее положению за рольгангом 8. Основные упоры 5 толкают груз 7 до тех пор, пока грузоне- сущая платформа 4 проходит горизонтальный участок а-б. При переходе с горизонтального участка а-б на вертикальный б-в грузонесущая платформа 4 поднимается, при
0 этом груз 7 фиксируется упорами 5 и 6.
При переходе с вертикального участка на
горизонтальный грузонесущая платформа 4
перемещается в горизонтальной плоскости, а
груз 7 оказывается на рольганге 9.
При дальнейшем движении грузонесущей
платформы 4 под рольгангом 9 основные упоры 5 проталкивают груз 7 вдоль него (фиг.5). При движении грузонесущей платформы 4 по вертикальному участку она опускается, упоры 5 и 6 оказываются под роль0 Гангом 9, груз 7 освобождается и далее транспортируется рольгангом 9, а грузонесушая платформа 4 продолжает свое движение, совершая холостой ход до подъема на вертикальном участке пути. Далее цикл подъема груза 7 повторяется.
Если основные упоры 5 при подъеме грузонесущей платформы 4 на вертикальном участке пути оказываются под грузом 7 (фиг.6), что возможно при неравномерности подачи груза, то упоры 5 опускаются на шарнирах 10 и груз 7 не захватывается, оставаясь на рольганге 8, а грузонесущая платформа 4 уходит на вертикальный участок незагруженной. Груз 7, оставшийся на рольганге 8, захватывается следом идущей грузонесущей платформой 4. Таким образом
обеспечивается непрерывный цикл загрузки. При необходимости опустить груз 7 изменяют направление движения тяговых цепей 2 и 3 на противоположное посредством реверсирования привода 1. Рольганг 9 работает на загрузку. Грузонесущая платформа 4
0 на участке пути в-г поднимается, упоры 5 и 6 поднимаются над рольгангом 9, а упоры б проталкивают груз 7 вдоль него на горизонтальном участке движения. При дальнейшем движении грузонесущей платформы 4 на горизонтальном участке груз 7 остается
на грузонесущей платформе 4 между упорами 5 и 6.
При движении на участке в-б грузонесущая платформа 4 с грузом 7 опускается
Q до перехода с вертикального участка пути на горизонтальный. При горизонтальном движении грузонесущая платформа 4 оказывается под рольгангом 8 и упоры 6 проталкивают груз 7 по рольгангу 8 до тех пор, пока грузонесущая платформа 4 не пе5 рейдет на вертикальный участок, где она опускается ниже рольганга 8, на котором остается груз 7, который выводится за пределы элеватора.
0
ё
S 5 J
Вид 5
В
,t
фиг. 2
12 1313
I /
дзиг.з 7J13
фиг. if
оофообос:
. 5
фиг.6
L/
фиг. 8
/
w
VI
фиг.д
11
Составитель Б. Толчанов
Редактор Л ПовханТехред И. ВересКорректор М. Максимишинец
Заказ 4070/21Тираж 833Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская иаб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Полочный элеватор | 1988 |
|
SU1565787A1 |
| ПОЛОЧНЫЙ ЛЕНТОЧНЫЙ ЭЛЕВАТОР | 2009 |
|
RU2406672C1 |
| Элеватор для штучных грузов | 1987 |
|
SU1511181A1 |
| Устройство для транспортировки и загрузки штучных грузов | 1988 |
|
SU1518242A1 |
| Люлечный элеватор | 1986 |
|
SU1406082A1 |
| Вертикальный четырехцепной конвейер для штучных грузов | 1985 |
|
SU1276583A1 |
| Конвейер для штучных грузов | 1985 |
|
SU1276584A1 |
| Вертикальная конвейерная система | 1990 |
|
SU1738743A1 |
| Вертикальный цепной конвейер | 1976 |
|
SU606768A1 |
| ВЕРТИКАЛЬНАЯ КОНВЕЙЕРНАЯ СИСТЕМА | 2002 |
|
RU2240968C2 |
| Авторское свидетельство СССР № 755693, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для укладки плоских изделий в стопу | 1976 |
|
SU598810A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
