Изобретение относится к стропам для подъема и дистанционной растроповки пакета грузов, например металлопроката, при строительно-монтажных и транспортных работах.
Цель изобретения - повышение надежности.
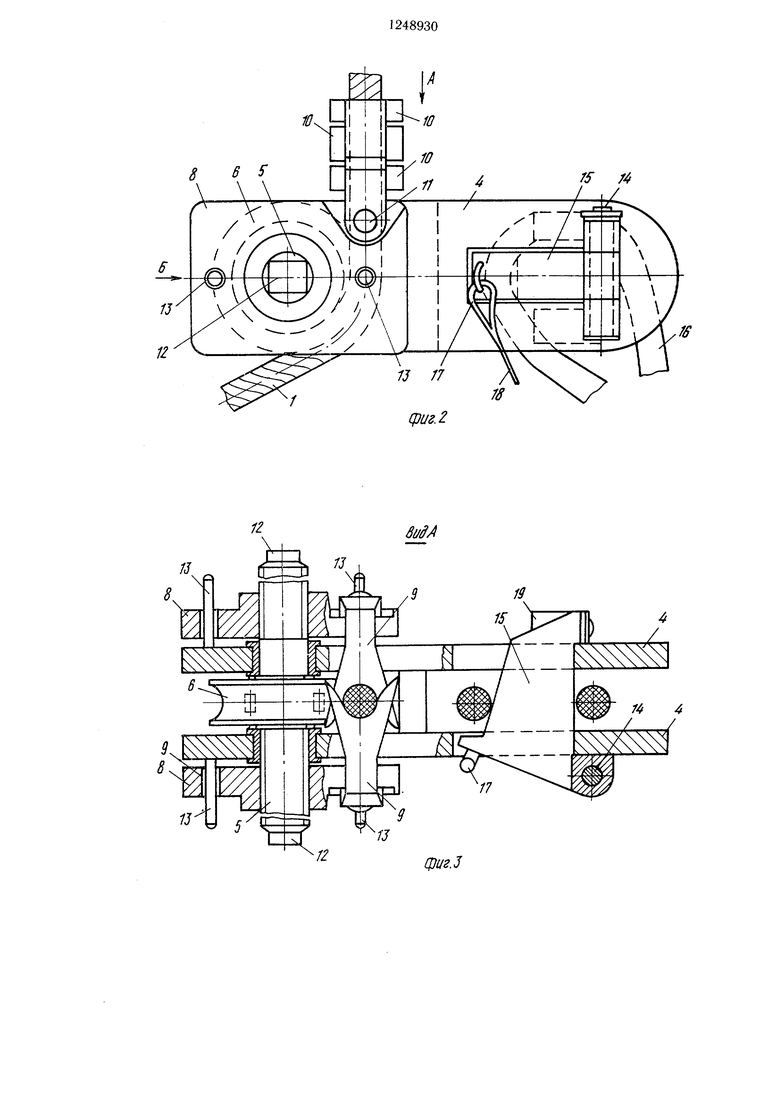
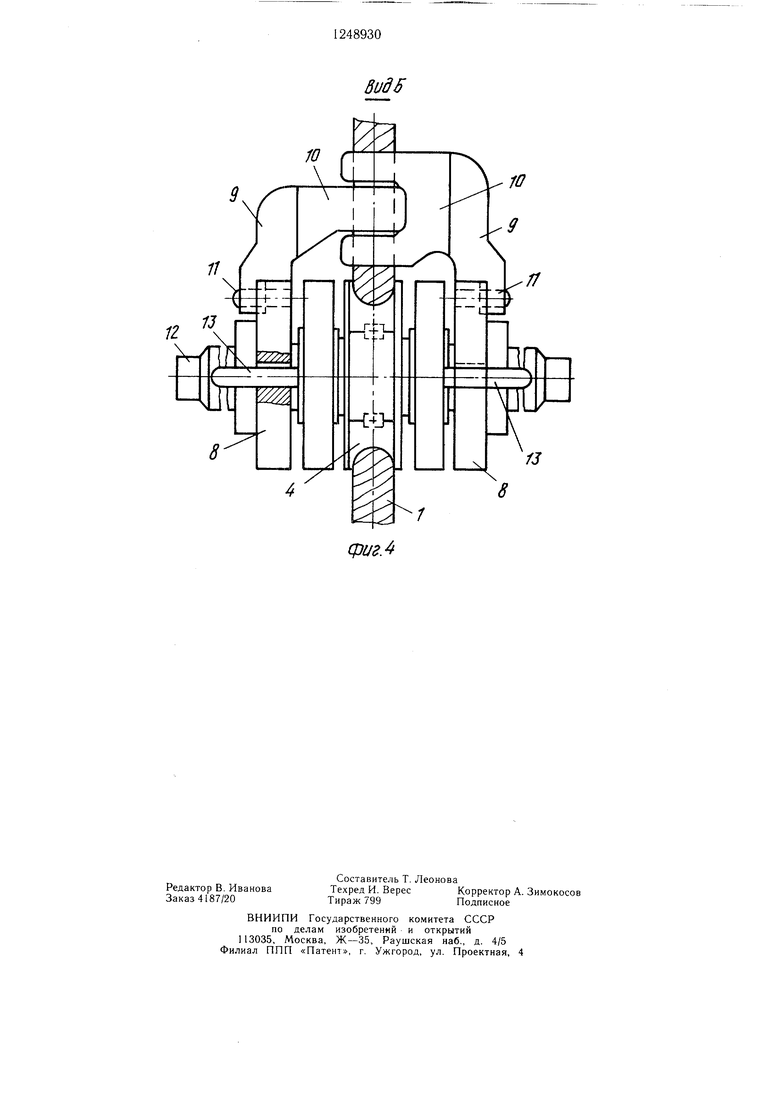
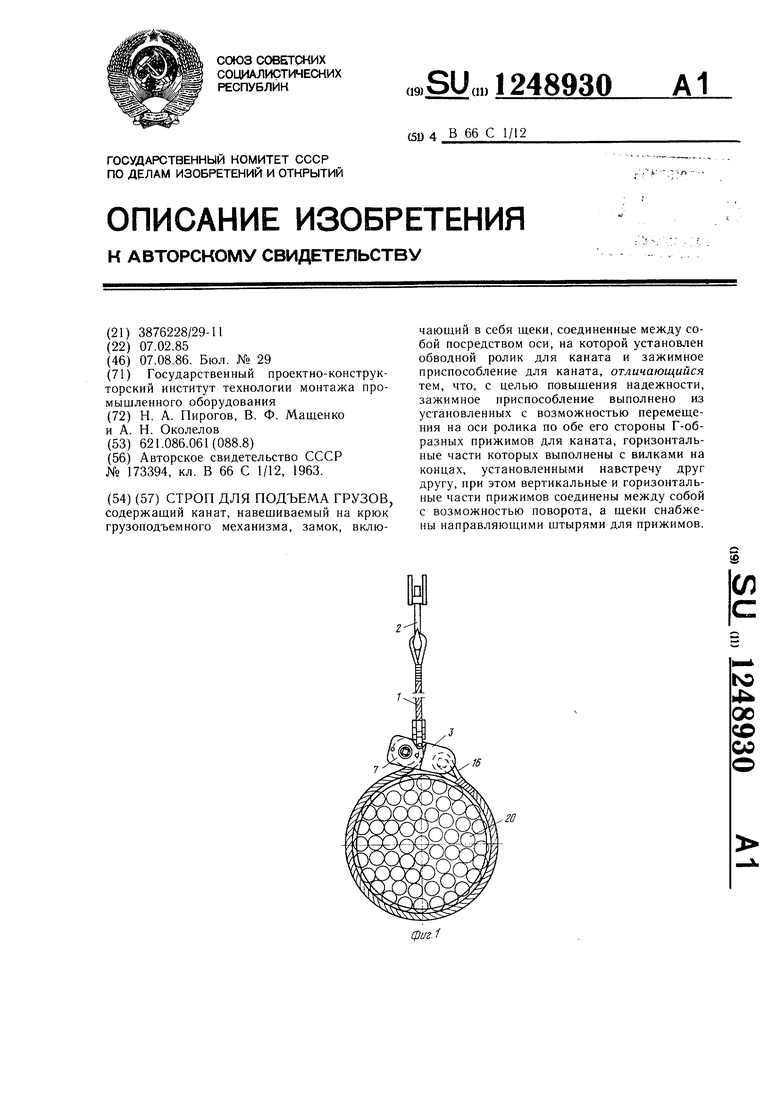
На фиг. 1 показан предлагаемый строп для подъема грузов, общий вид; на фиг, 2 - замок с зажимным приспособлением; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - вид Б на фиг. 2.
Предлагаемый строп для подъема грузов содержит канат 1, навешиваемый на крюк 2 грузоподъемного механизма, замок 3, корпус которого содержит две ш,еки 4, между
На рычаге 15 закреплено ушко 17, с которым связан тросик 18 дистанционного управления.
На другой шеке 4 установлена пружин ная защелка 19.
5Устройство работает следующим образом.
Груз 20, предназначенный для подъема, охватывают канатом 2 и закрепляют петлю 16 обратной ветви каната 1 на рычаге 15 10 устройства фиксации обратной ветви каната 1.
Петлю основной ветви каната 1 навешивают на крюк 2 грузоподъемного механизма и начинают подъем.
При этом под действием натяжения оскоторыми установлен на оси 5 обводной 5 новной ветви каната 1 начинает вращать- ролик 6, взаимодействующий с основнойся обводной ролик 6, жестко связанный с
ветвью каната 1, зажимное приспособленке 7 и устройство для фиксации обратной
осью 5.
Части 8 прижимов под действием вращеветви каната 1. Зажимное приспособление пни оси 5 и в результате соединения их с 7 выполнено из установленных с воз.мож- п осью 5 начинают перемещаться вдоль резь- ностью перемещения на оси ролика по обе его стороны Г-образных прижимов для каната. Вертикальная часть 8 каждого прижима выполнена в виде пластины, а горизонтальная часть 9 - с вилкой 10 на конце
бовых участков оси 5 навстречу друг другу, так как резьба на концах оси 5 противоположна.
При этом направляющие штьфи 13 обеспечивают только поступательное перемещеи соединена с частью 8 посредством оси 11, 25 ние прижимов, HCKjnoqnB их вращение.
При перемещении прижимов навстречу друг другу вилки 10 частей 9 будут с двух сторон охватывать основную ветвь каната I и зажимать ее.
Усилие зажатия каната будет тем боль- З ше, чем больше масса поднимаемого груза, т.е. усилие зажатия основной ветви каната устанавливается автоматически.
Далее сформированный пакет перемещают и опускают на место хранения.
необходимости длительного хранебовои части оси 5 с противоположных сто- 35 .„ сформированного пакета можно вручную, вращая ось 5 обводного ролика 6 за хвостовики 12, усилить зажатие основной ветви каната 1 вилками 10, что предотвращает ослабление натяжения каната при сня- 40
обеспечивающей ограниченный поворот час ти 9 прижима относительно части 8.
Вилки Ю частей 9 прижимов перекрывают зевы друг друга и взаимодействуют с основной ветвью каната 1 (фиг. 4).
Концы оси 5 выполнены с правой и левой резьбой и заканчиваются четырехгранными хвостовиками 12 под ключ.
Части 8 прижимов установлены на резьрон и с возможностью перемещения вдол них.
На щеках 4 замка 3 установлены направляющие штыри 13, предотвращающие вращение прижимов зажимного приспособления при переме цении их вдоль резьбовых концов оси 5.
тин с него усилия от веса груза. Освобождение основной ветви каната в этом случае осуществляется вращением оси 5 в обратную сторону.
Устройство для фиксации обратной ветви стропа представляет собой поворотный относительно оси 14, закрепленной на одной из щек 4 замка 3, двуплечий рычаг 15, перекрывающий зев между щеками 4 замка 3, на который навешивается петля 16 обратной ветви стропа.
На рычаге 15 закреплено ушко 17, с которым связан тросик 18 дистанционного управления.
На другой шеке 4 установлена пружин ная защелка 19.
5Устройство работает следующим образом.
Груз 20, предназначенный для подъема, охватывают канатом 2 и закрепляют петлю 16 обратной ветви каната 1 на рычаге 15 0 устройства фиксации обратной ветви каната 1.
Петлю основной ветви каната 1 навешивают на крюк 2 грузоподъемного механизма и начинают подъем.
При этом под действием натяжения ос5 новной ветви каната 1 начинает вращать- ся обводной ролик 6, жестко связанный с
новной ветви каната 1 начинает вращать- ся обводной ролик 6, жестко связанный с
осью 5.
Части 8 прижимов под действием вращепни оси 5 и в результате соединения их с осью 5 начинают перемещаться вдоль резь-
пни оси 5 и в результате соединения их с осью 5 начинают перемещаться вдоль резь-
бовых участков оси 5 навстречу друг другу, так как резьба на концах оси 5 противоположна.
При этом направляющие штьфи 13 обеспечивают только поступательное перемеще.„ сформированного пакета можно вручную, вращая ось 5 обводного ролика 6 за хвостовики 12, усилить зажатие основной ветви каната 1 вилками 10, что предотвращает ослабление натяжения каната при сня-
тин с него усилия от веса груза. Освобождение основной ветви каната в этом случае осуществляется вращением оси 5 в обратную сторону.
Для освобождения груза непосредственно после перемещения посредством тросика 18 поворачивают рычаг 15, при этом отжимают ггружинную защелку 19 н освобождают петлю 16 обратной ветви каната 1, затем, поднимая крюк 2 грузоподъемного механизма, выдергивают канат 1 из-под гоуза.
//
(риг. 2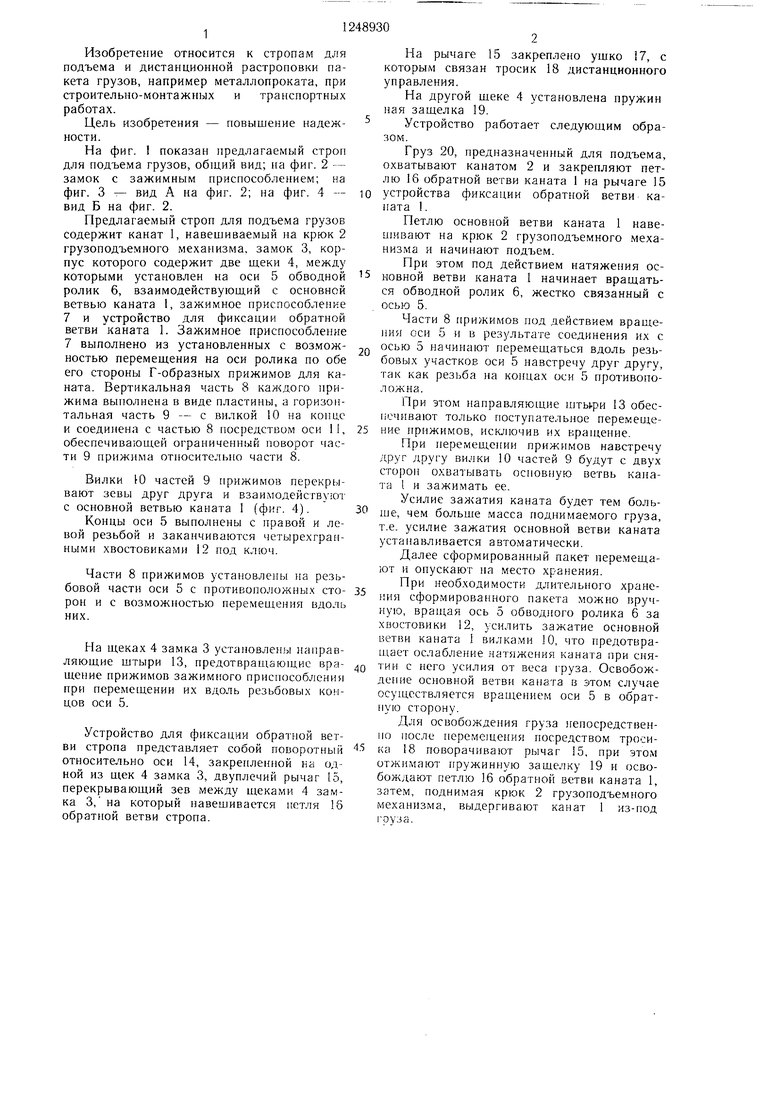
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для пакета группы длинномерных грузов | 1985 |
|
SU1414749A1 |
| Грузозахватное устройство | 1988 |
|
SU1504197A1 |
| Захватное устройство | 1984 |
|
SU1230960A1 |
| Захват для балок двутаврового сечения | 1981 |
|
SU998296A1 |
| ПОДЪЕМА ГРУЗА | 1967 |
|
SU198595A1 |
| Грузоподъемная траверса | 1989 |
|
SU1687561A1 |
| СТРОП | 2000 |
|
RU2176980C1 |
| Канатный зажимной грузозахват | 1989 |
|
SU1773842A1 |
| Строп-контейнер | 1983 |
|
SU1154198A1 |
| Грузозахватное устройство | 1980 |
|
SU931656A1 |
13
19
)
/
14
/
фиг.З
Составитель Т. Леонова
Техред И. ВересКорректор А. Зимокосов
Тираж 799Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
Вид
фиг А
| ПОДЪЕМА ПАЧЕК ДЛИННОЛ1ЕРНЫХ ГРУЗОВ | 0 |
|
SU173394A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
