1
Изобретение относится к автоматике и вычислительной технике и может .быть использовано при построении систем программного управления в масштабе реального времени.
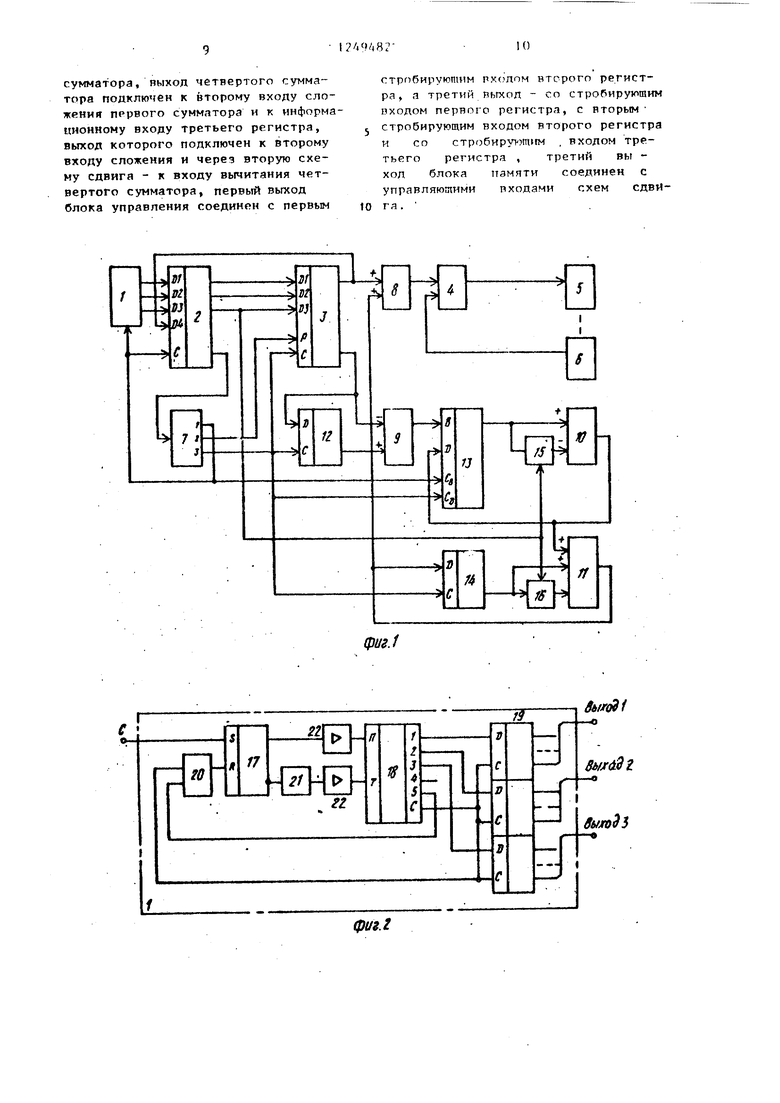
Цель изобретения - улучшение динамической характеристики системы управления путем исключения скачков скорости изменения вычисляемых координат при сопряжении отдельных участков интерполируемой траектории На фиг, 1 представлена структурная схема устройства; на фиг. 2-8 - принципиальные схемь блоков ввода, памяти, интерполятора, согласования управления, схемы сдвига и сумматора для конкретного устройства программного управления; на фиг. 9 графики, поясняющие процесс сглаживания расчетной траектории, и временные диаграммы сигналов с блока управления.
Устройство содержит блок i ввода программы, блок 2 памяти, интерполятор 3, блок 4 согласования, привод 5, датчик 6 обратной связи, блок 7 управления, с первого по четвертый с; г маторы 8 - I 1 ,. с первого по третий регистры 12 - 14, первую и вторую схемы 15 и 16 сдвига.
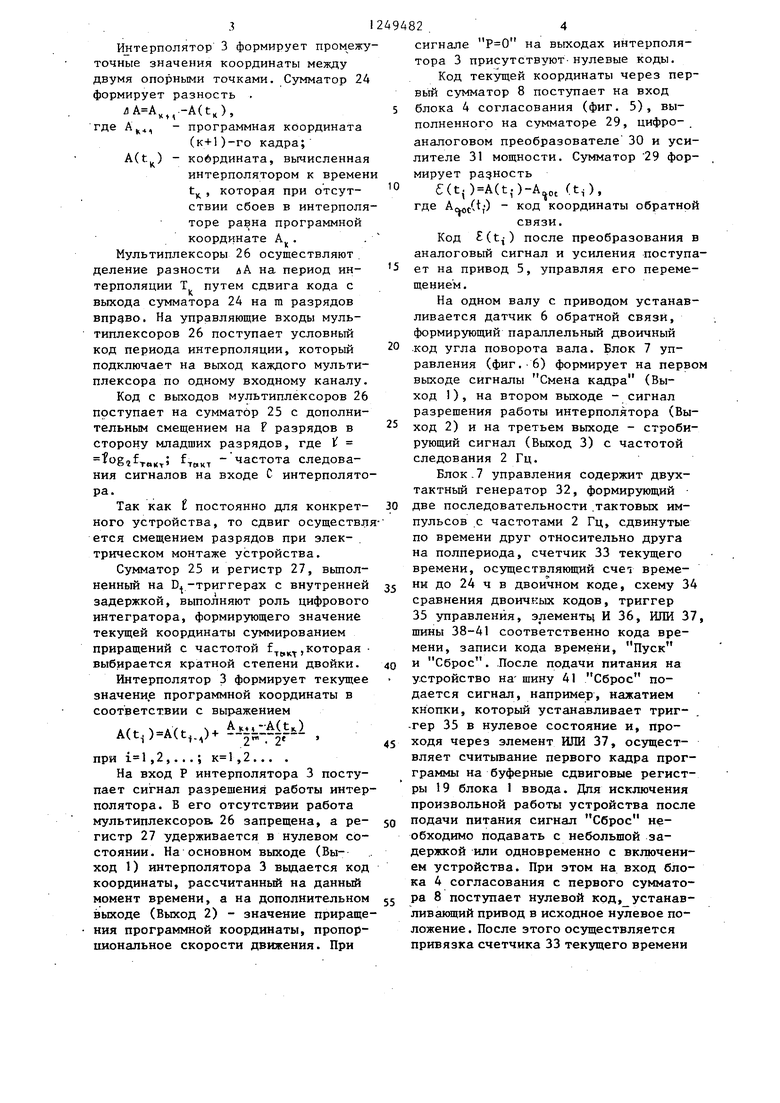
Блок 1 ввода программы (фиг. 2) содержит триггер 1 7 ;, считьшатель 1 8 с перфоленты, буферные сдвиговые регистры 19, элемент И 20, формирователь 21 импульса по фронту, усилители 22 мощности.
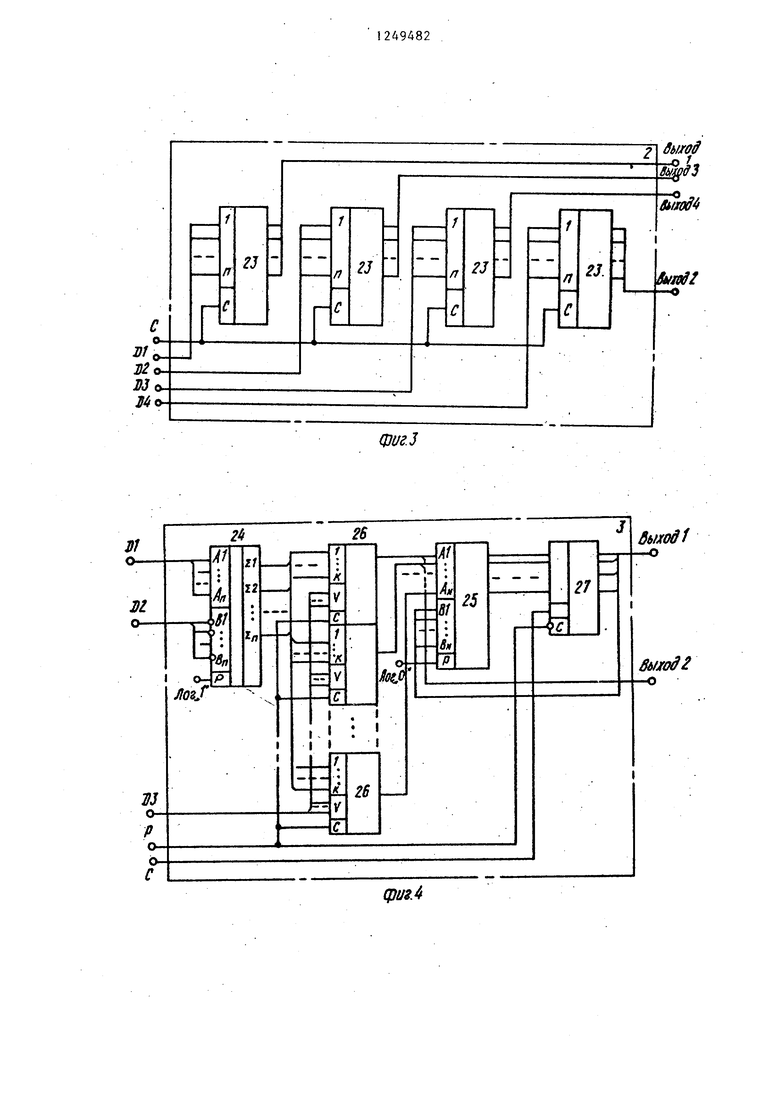
Блок 2 памяти выполнен на регистрах 23 с D-входами. Интерполятор 3 содержит сумматоры 24 и 25, мультиплексоры 26 и регистр 27,
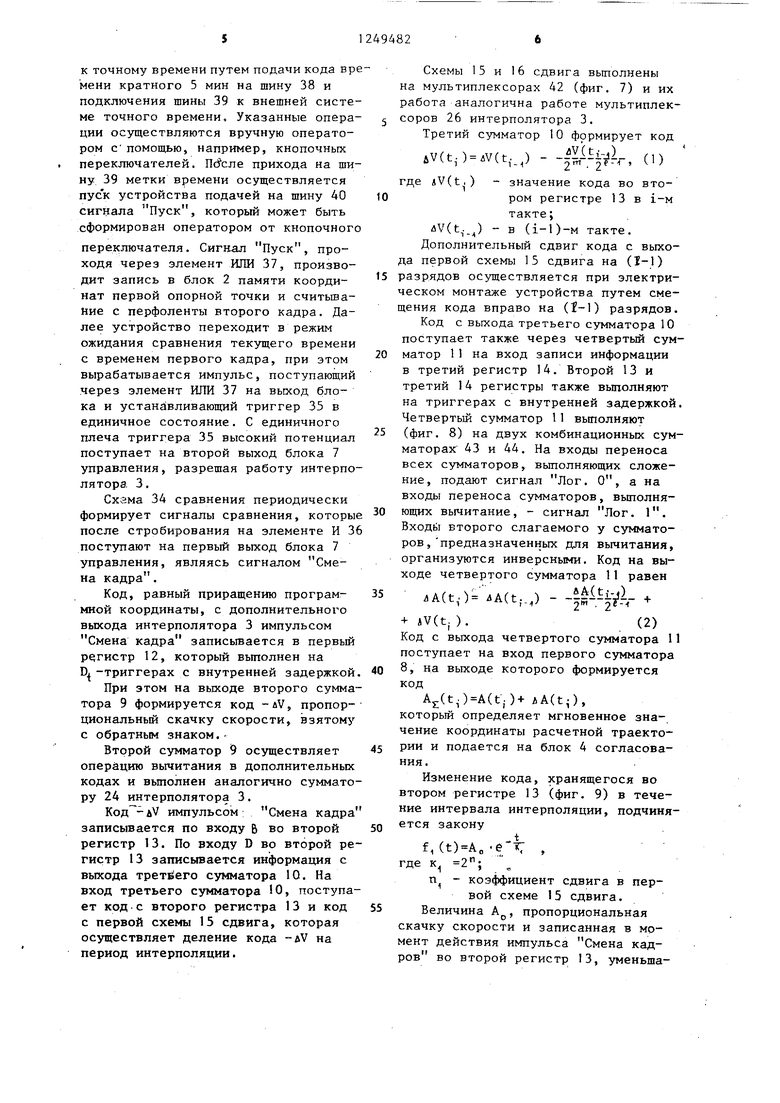
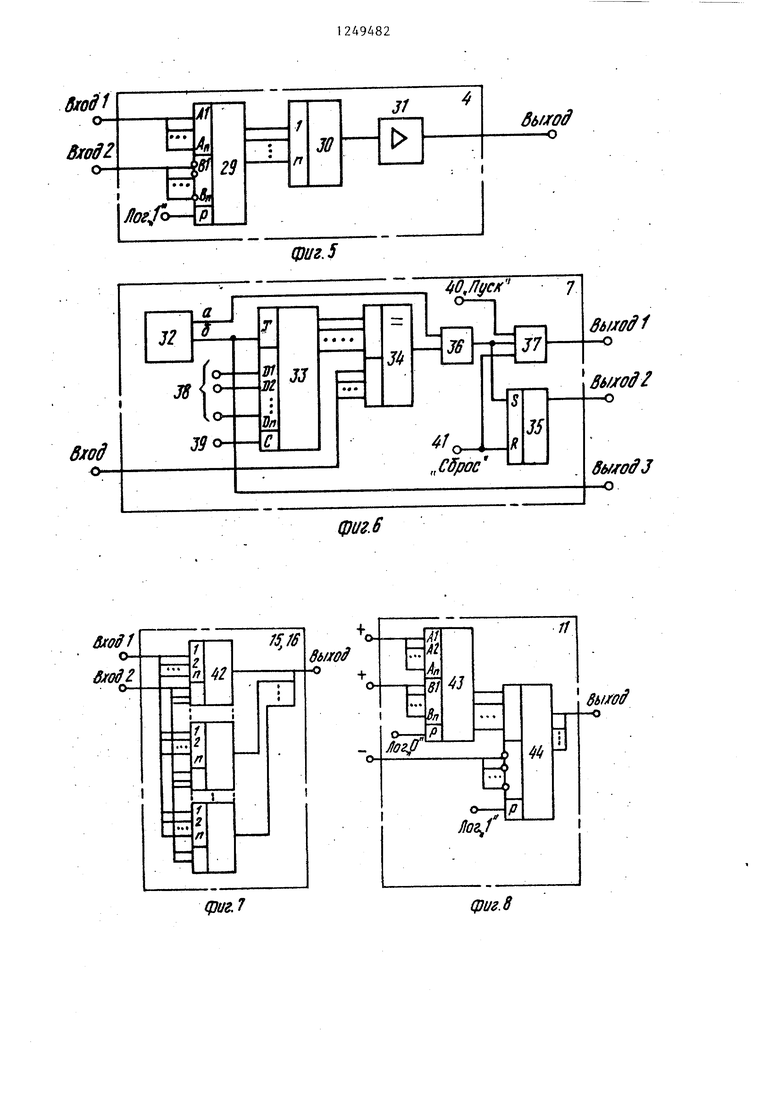
Блок 4 с.огласования (фиг« 5) содержит сумматор 29, цифроаналого- вый преобразователь 30 и усилитель 31 мощности.
Блок 7 управления (фиг. 6) содержит двухтактньй генератор 32, счетчик 33 текущего времени, схему 34 сравнения двоичнькс кодов, триггер 35 управления, элемент И 36, элемент ИЛИ 37, шину 38 кода времени, шину 39 записи кода времени, пшну 40 Пуск и шину 41 Сброс..
д
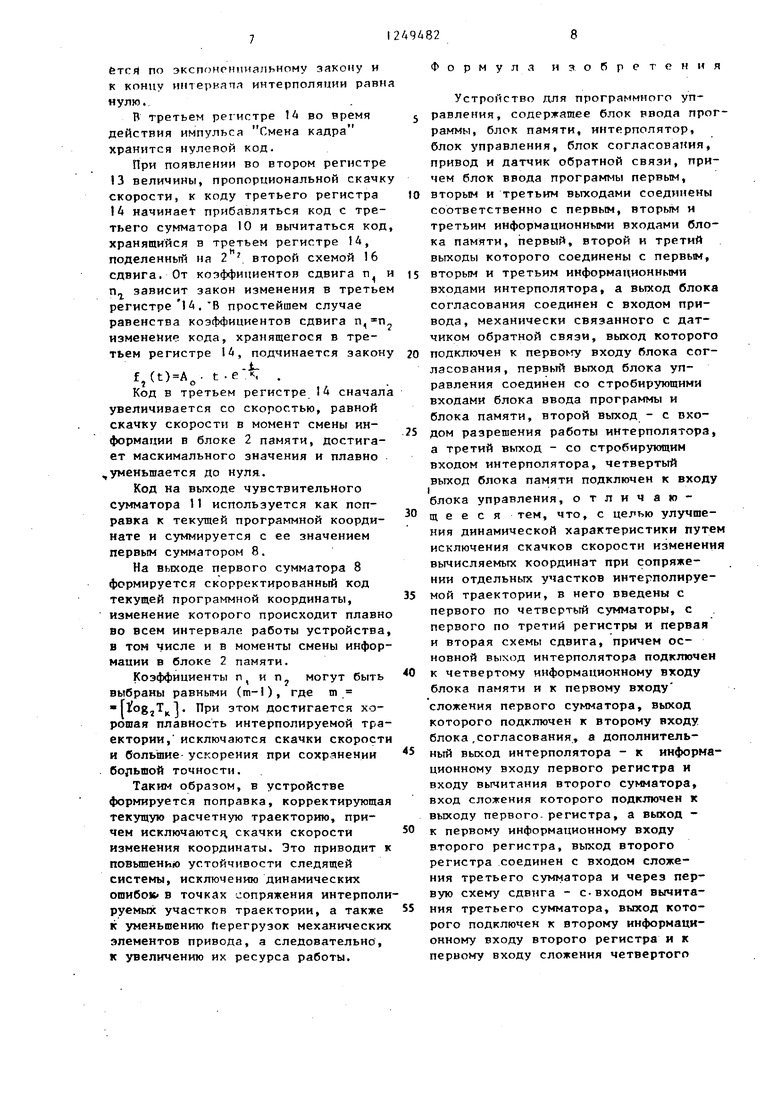
Схемы 15 и 16 сдвига (фиг. 7) содержат мультиплексоры 42.
Четвертый сумматор 11 (фиг. 8) содержит комбинационные сумматоры 43 и 44,
49482
Устройство работает следуюр им образом.
Блок 1 ввода программы по сигналу Смена кадра с блока 7 управления 5 (выход 1 блока 7) выдает информацию об одной опорной точке, которая содержит значения программной координаты АИ , программного времени t, и периода интерполяции, возможными зна- чениями которого являются только 2 секунд. Период интерполяции задается в условном коде, равном показателю степени т.
При поступлении сигнала на вход 5 с триггер . 17 устанавливается в единичное состояние.
Сигнал с единичного плеча триггера 1 7 , усиленный по мощности, поступает на вход П .(пуск ленты) считы- 20 вателя 18 с перфоленты. При этом начинает продвигаться 5-дорожечная лента и на выходах 1-5 считывателя 18 с перфоленты появляются информационные сигналы, а на выходе С - 25 стробирующий сигнал, поступающий на вход сдвига буферных сдвиговых регистров 19 и разрешающий запись информации со считьшателя 18 с перфоленты. На выходе буферных сдвиговых .30 регистров 19 появляется информация об одном кадре программы, разверну- тая в виде параллельного кода.
5
На пятой дорожке перфоленты-печатается маркерное отверстие в каждого кадра программы. После пр.од- вижения ленты, на один кадр, сигнал с маркера, проходя через элемент И 20, сбрасьшает триггер 17 в нулевое состояние, при этом исчезает сигнал Пуск ленты, а на выходе формирователя 21 по фронту появляется импульс торможения ленты. На этом считьшание одного кадра прекращается. Время считьшания 0,25 с, для правильной работы устройства необходимо, чтобы частота импульсов Смена кадра не превьщзала 4 Гц, а их длительность - не более 0,25 с.
0 Информация с. блока 1 ввода записывается в блок 2 памяти. При подаче сигнала Смена кадра с блока 7 управления в первые три регистра записываются программная -координата А,,
5. программное время t, и период интерполяции, а в четвертый регистр - координата A(), рассчитанная интерполятором 3.
Интерполятор 3 формирует промежуточные значения координаты между двумя опорными точками. Сумматор 24 формирует разность
,,,.-А(е,),
где А, - программная координата
(к+1)-го кадра; A(t.,) - кобрдината, вычисленная
К
интерполятором к времен t , которая при отсутствии сбоев в интерполяторе равна программной координате А.
Мультиплексоры 26 осуществляют. деление разности лА на период ин- терполяции Т путем сдвига кода с выхода сумматора 24 на m разрядов впрдво. На управляющие входы мультиплексоров 26 поступает условный код периода интерполяции, который подключает на выход каждого мультиплексора по одному входному каналу. Код с вькодов мультиплексоров 26 поступает на сумматор 25 с дополнительным смещением на Р разрядов в сторону младших разрядов, где Y
оё7 т«кг5 - частота следования сигналов на входе С интерполятора.
Так как Е постоянно для конкрет- ного устройства, то сдвиг осуществл ется смещением разрядов при электрическом монтаже устройства.
Сумматор 25 и регистр 27, вьтол- неиный на D -триггерах с внутренней задержкой, выполняют роль цифрового интегратора, формирующего значение текущей координаты суммированием приращений с частотой f,, которая выбирается кратной степени двойки.
Интерполятор 3 формирует текущее значение программной координаты в соответствии с выражением
/«- i (tn.)
A(t)A(t.,)+ -2.-2 при ,2,...; ,2... .
На вход Р интерполятора 3 поступает сигнал разрешения работы интерполятора. В его отсутствии работа мультиплексоров. 26 запрещена, а ре- гистр 27 удерживается в нулевом состоянии. На основном выходе (Выход 1) интерполятора 3 вьщается код координаты, рассчитанный на данный момент времени, а на дополнительном выходе (Выход 2) - значение приращения программной координаты, пропорциональное скорости движения. При
0
5
5
5
сигнале на выходах интерполятора 3 присутствуют-нулевые коды.
Код текущей координаты через первый сумматор 8 поступает на вход блока 4 согласования (фиг. 5), выполненного на сумматоре 29, цифро-. аналоговом преобразователе 30 и усилителе 31 мощности. Сумматор 29 формирует разность
(t. )A(t.) (t), где Ac-ofCt;) - код координаты обратной связи.
Код (t) после преобразования в аналоговый сигнал и усиления поступает на привод 5, управляя его перемещением .
На одном валу с приводом устанавливается датчик 6 обратной связи, формирующий параллельный двоичный КОД угла поворота вала. Блок 7 управления (фиг.-6) формирует на первом выходе сигналы Смена кадра (Выход 1), на втором выходе - сигнал разрещения работы интерполятора (Выход 2) и на третьем выходе - строби- рующий сигнал (Выход 3) с частотой следования 2 Гц.
Блок . 7 управления содержит двухтактный генератор 32, формирующий две последовательности .тактовых импульсов с частотами 2 Гц, сдвинутые по времени друг относительно друга на полпериода, счетчик 33 текущего времени, осуществляющий счет времени до 24 ч в двоичном коде, схему 34 сравнения двоичных кодов, триггер 35 управления, элементу И 36, ИЛИ 37, щины 38-41 соответственно кода времени, записи кода времени, Пуск и Сброс. .После подачи питания на устройство на шину 41 Сброс подается сигнал, например, нажатием кнопки, который устанавливает триг- -гер 35 в нулевое состояние и, проходя через элемент ИЛИ 37, осуществляет считьгоание первого кадра прог- граммы на буферные сдвиговые регистры 19 блока 1 ввода. Для исключения произвольной работы устройства после подачи питания сигнал Сброс необходимо подавать с небольшой задержкой или одновременно с включением устройства. При этом на вход блока 4 согласования с первого сумматора 8 поступает нулевой код, устанав- ливакиций привод в исходное нулевое положение. После этого осзтцествляется привязка счетчика 33 текущего времени
к точному времени путем подачи кода врмени кратного 5 мин на шину 38 и подключения шины 39 к внетней системе точного времени. Указанные опера- ции осуществляются вручную оператором с помощью, например, кнопочных переключателей. прихода на шину 39 метки времени осуществляется пус к устройства подачей на шину 40 сигнала Пуск, который может быть сформирован оператором от кнопочного
переключателя. Сигнал Пуск, проходя через элемент ИЛИ 37, производит запись в блок 2 памяти координат первой опорной точки и считьша- Ние с перфоленты второго кадра. Далее устройство переходит в режим ожидания сравнения текущего времени с временем первого кадра, при этом вырабатывается импульс, поступающий через элемент ИЛИ 37 на выход блока и устана1вливающий триггер 35 в единичное состояние. С единичного плеча триггера 35 высокий потенциал поступает на второй выход блока 7 управления, разрешая работу интерполятора 3.
Схама 34 сравнения периодически
формирует сигналы сравнения, которые
после стробирования на элементе И 36 поступают на первый выход блока 7 управления, являясь сигналом Смена кадра.
Код, равный приращению програм- мной координаты, с дополнительно1 о выхода интерполятора 3 импульсом Смена кадра записывается в первый регистр 12, который выполнен на DI -триггерах с внутренней задержкой
При этом на выходе второго сумматора 9 формируется код -aV, пропорциональный скачку скорости, взятому с обратным знаком.Второй сумматор 9 осуществляет операцию вычитания в дополнительных кодах и вьтолнен аналогично сумматору 24 интерполятора 3.
импульсом: Смена кадра записывается по входу Б во второй регистр 13. По входу D во второй регистр 13 записывается информация с выхода третьего сумматора Ю. На вход третьего сумматора Ю, поступает код с второго регистра 13 и код с первой схемы 15 сдвига, которая осуществляет деление кода -iV на период интерполяции.
Схемы 15 и 16 сдвига выполнены на мультиплексорах 42 (фиг. 7) и их работа аналогична работе мультиплексоров 26 интерполятора 3.
Третий сумматор 10 формирует код
uV(t.)V(t.) - -l -i-A-, (1)
где V(t, ) - значение кода во втором регистре 13 в i-м такте;
(t.J - в (i-l)-M такте. Дополнительный сдвиг кода с выхода первой схемы 15 сдвига на (1-1) разрядов осуществляется при электрическом монтаже устройства путем смещения кода вправо на (1-1) разрядов. Код с выхода третьего сумматора 10 поступает также через четвертый сумматор 11 на вход записи информации в третий регистр 14. Второй 13 и третий 14 регистры также выполняют на триггерах с внутренней задержкой. Четвертый сумматор 11 выполняют (фиг. 8) на двух комбинационных сумматорах 43 и 44. На входы переноса всех сумматоров, выполняющих сложение, подают сигнал Лог. О, а на входы переноса сумматоров, выполняющих вычитание, - сигнал Лог. 1. Входы второго слагаемого у сумматоров , предназначенных для вычитания, организуются инверсными. Код на выходе четвертого сумматора 11 равен
.A(t,).A(t,.,) --pitiyL
+ lV(t. ).
(2)
Код с выхода четвертого сумматора поступает на вход первого сумматора 8, на выходе которого формируется
код
Aj.(t.)A(t;)+ AA(t-),
который определяет мгновенное значение координаты расчетной траектории и подается на блок 4 согласования .
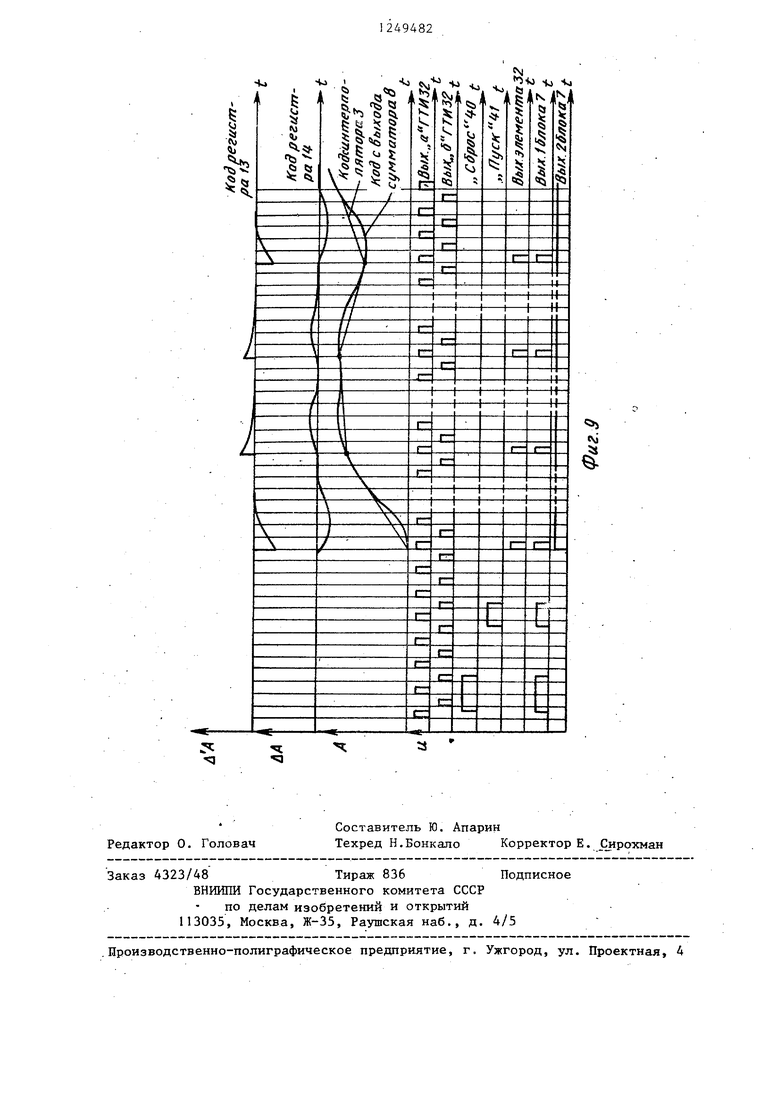
Изменение кода, хранящегося во втором регистре 13 (фиг. 9) в течение интервала интерполяции, подчиняется закону
f, (t)A« -ef , где к ,
п - коэффициент сдвига в первой схеме 15 сдвига. Величина А, пропорциональная скачку скорости и записанная в момент действия импульса Смена кадров во второй регистр 13, уменьшается по экспоненциальному закону и к концу интервяпл интерполяции равн нулю.
В третьем рет истре 4 во время действия импульса Смена кадра хранится нулевой код.
При появлении во втором регистре 13 величины, пропорциональной скамку скорости, к коду третьего регистра 16 нaчинaet прибавляться код с третьего сумматора Ю и вычитаться код хранящийся в третьем регистре 14, поделенньп 1 на 2 второй схемой 16 сдвига. От коэффициентов сдвига п и п зависит закон изменения в третьем регистре 1 ii. В простейшем случае равенства коэффициентов сдвига п,п нзмене41ие кода, хранящегося в третьем регистре 1А, подминается закону
f(t)A. t . .
Код в третьем регистре 14 сначала увеличивается со скоростью, равной скачку скорости в момент смены информации в блоке 2 памяти, достигает маскимального значения и плавно . ,уменьщается до нуля.
Код на выходе чувствительного сумматора 1 используется как поправка к текущей программной координате и сут мируется с ее значением первым сумматором 8.
На выходе первого сумматора 8 формируется скорректированный код текущей программной координаты, изменение которого происходит плавно во всем интервале работы устройства, в том числе и в моменты смены информации в блоке 2 памяти.
Козффициенты п, и п, могут быть выбраны равными (т-1), где m fllogjT l. При этом достигается хорошая плавность интерполируемой траектории, исключаются скачки скорости и большие- ускорения при сохранении большой точности.
Таким образом, в устройстве формируется поправка, корректирующая текущую расчетную траекторию, причем исключаютс скачки скорости изменения координаты. Это приводит к повыщению устойчивости следящей системы, исключению динамических ощибок в точках сопряжения интерполируемых участков траектории, а также к уменьшению Перегрузок механических элементов привода, а следовательно, к увеличению их ресурса работы.
Формул v4 изобретени
Устройство для программного управления, содержащее блок ввода прораммы, блок памяти, интерполятор, блок управления, блок согласования, привод и датчик обратной связи, причем блок ввода программы первым, вторым и третьим выходами соединены соответственно с первым, вторым и третьим информационными входами блока памяти, первый, второй и третий выходы которого соединены с первым, вторым и третьим информационными входами интерполятора, а выход блока согласования соединен с входом привода, механически связанного с датчиком обратной связи, выход которого подключен к первоьгу входу блока согласования, первьтй выход блока управления соединен со стробирующими входами блока ввода программы и блока памяти, второй выход - с входом разрешения работы интерполятора, а третий выход - со стробирукицим входом интерполятора, четвертый
выход блока памяти подключен к входу I
блока управления, отличающееся тем, что, с целью улучшения динамической характеристики путе исключения скачков скорости изменени вычисляемых координат при сопряжении отдельных участков интерполируемой траектории, в него введены с первого по четвертый сумматоры, с первого по третий регистры и первая и вторая схемы сдвига, причем основной выход интерполятора подключен к четвертому информационному входу блока памяти и к первому входу сложения первого сумматора, выход которого подключен к второму входу блока ,согласования, а дополнительный выход интерполятора - к информационному входу первого регистра и входу вычитания второго сумматора, вход сложения которого подключен к выходу первого-регистра, а выход - к первому информационному входу второго регистра, выход второго регистра соединен с входом сложения третьего сумматора и через первую схему сдвига - с-входом вычитания третьего сумматора, выход которого подключен к второму информационному входу второго регистра и к первому входу сложения четвертого
сумматора, выход четвертого сумматора подключен к второму входу сложения пррвого сумматора и к информа- цмонному входу третьего регистра, выход которого подключен к второму входу сложения и через вторую схему сдвига - к входу вычитания четвертого сумматора, первый выход блока управления соединен с первым
стрпбируютим пх( лом второго регистра, а третий пьгхол - со строРируюшим входом первого регистра, с вторым стробирующим входом второго регистра и со стробирут1т гм , входом третьего регистра , третий вы - ход блока памяти соединен с управляющими входами схем сдвига .
фиг. 5
фиг. 6
фиг. 7
SbiJfoS
фиг. 8
Редактор О. Головач
Составитель Ю. Апарин
Техред Н.БонкалоКорректор Е.С ирохман
Заказ 4323/48Тираж 836Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
N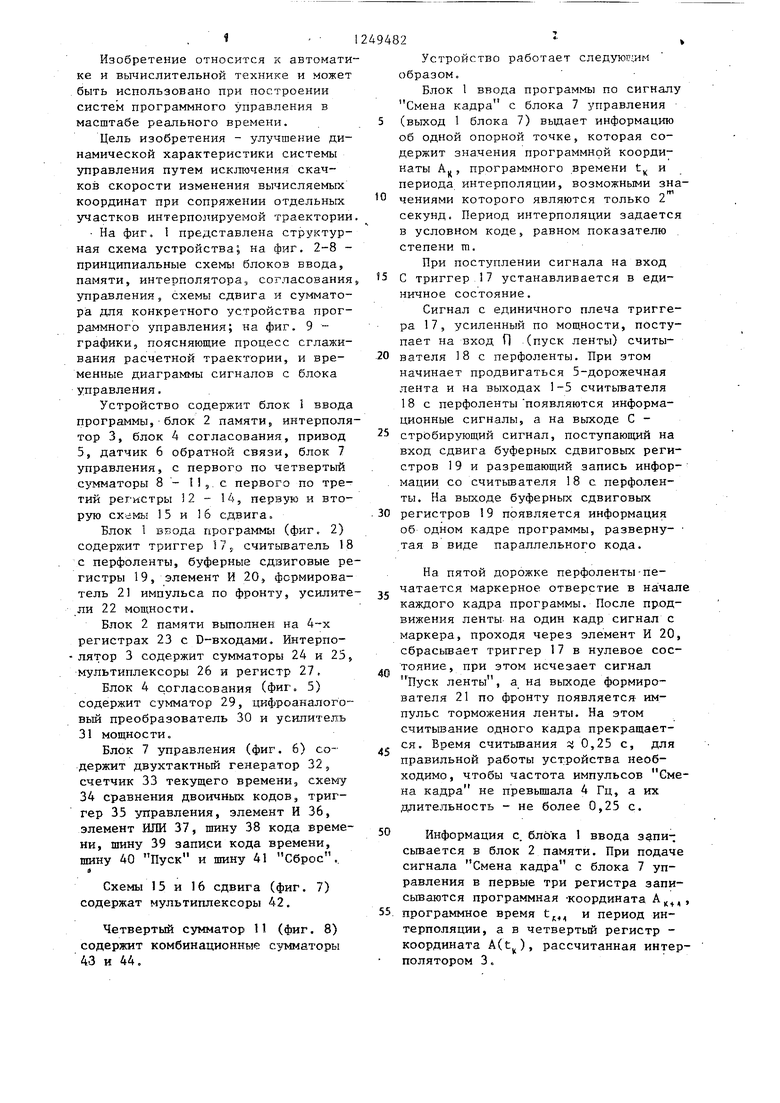
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления | 1984 |
|
SU1246055A1 |
| Устройство для программного управления электроприводом | 1985 |
|
SU1260919A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Устройство для программного управления | 1982 |
|
SU1108392A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Интерполятор | 1987 |
|
SU1413602A1 |
| Двумерный линейный интерполятор | 1985 |
|
SU1269152A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| Устройство для программного управления | 1986 |
|
SU1423981A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано при построении систем программного управления в масштабе реального времени. Решается задача улучшения динамической характеристики системь путем исключения скачков скорости изменений вьгаисля- емых координат при сопряжении отдельных участков интерполируемой траектории. По сигналу от блока управления информация об одной опорной точке с помощью блока ввода заносится в блок памяти. Интерполятор формирует промежуточные значения координат между двумя опорными точками. Код текзтцей координаты из интерполятора через первый сумматор поступает на вход блока согласования и после преобразования в аналоговый сигнал - на привод. Датчик обратной связи формирует-параллельный двоичный код угла поворота вала привода. Код, равный приращению программной координаты, с дополнительного выхода интерполятора записьшается в первый регистр. При этом на выходе второго сумматора формируется код, пропорциональный скачку скорости, с обратным знаком. При появлении во втором регистре величины,-пропорциональной скачку скорости, к коду третьего регистра начинает прибавляться код с третьего сумматора и вычитаться код, хранящийся в третьем регистре, поделенный на величину, задаваемую второй схемой сдвига, код в третьем регистре сначала увеличивается со скоростью, равной скачку скорости в момент смены информации в блоке памяти, достигает максимального значения и плавно уменьшается до нуля. Код на выходе четвертого сумматора используется как поправка к текущей программной координате и суммируется с ее значением первым сумматором, на выходе первого сумматора формируется скорректированный код текущей программной координаты, изменение которого происходит плавно во всем интервале работы устройства, в том числе и в моменты смены информации в блоке памяти. 9 ил. Ш to 4 fC 4 СХ) lN9 
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ С ШАГОВЫМПРИВОДОМ | 0 |
|
SU336646A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР № 327443, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
