входу счетчика длины, и, кроме того, первый и рторой входы второго синхронизатора присоединены соответственно
Изобретение относится к машиностроению, в частности к оборудованию для мерного реза изделий из замкнутых сортовых профилей со сложной формой поперечного сечения.
Целью изобрйтения является расширение области его использования, а именно разрезание изделий из сортовых замкнутых профилей со сложной формой поперечного сечения.
На фиг.1 приведена блок-схема предлагаемого устройства; на фиг.2 - временная диаграмма выходных сигналов командного блока; на фиг.З - блок- схема позиционного регулятора; на фиг,А - блок-сКема командного блока; на фиг.З - блок-схема синхронизато- ров; на фиг.6 временные диаграммы сигналов на входах и выходах синхронизаторов .
Устройство (фиг.1) содержит летучую пилу 1 с приводами 2 и 3 продольного и поперечного перемещений соответственно, импульсный датчик Д перемещения пилы 1, датчик 5 окончания реза изделия 6 Перемещение изделия 6 контролируется импульсньм датчиком 7 перемещения, установленньм перед формовочным станом 8, придающим изделию 6 сложную форму поперечного сечения.
Привод 2 продольного перемещения управляется блоком 9 продольного перемещения, который состоит из цифро- аналогового преобразователя 10, позиционного регулятора 11, силового преобразователя 12, преобразователя 13 частота-напряжение и злемента 14 сравнения кодов, причем выход преобразователя 13 частота-напряжение соединен с вторым входом позиционного регулятора 11, вход элемента 14 сравнения кодов соединен с входом цифроаналого- вого преобразователя 10.
Привод 3 поперечного перемещения управляется блоком 15 поперечного перемещения. Исходное положение летучей пилы 1 контролируется датчиком 1Ь исходного положения. Работой блоков 9
к датчику перемещения изделия и к второму выходу генератора синхрочас- тот.
и 15 управляет командный блок 17, име-- ющий входы 18 - 20 и выходы 21 - 25.
Счетчик 26 длины присоединен выходом к входам цифроаналогового преобразователя 10 и злемента 14 сравнения кодов блоков 9 управления. D-вход счетчика 26 длины подключен к задат- чику 27 длины, которым задается мерная длина изделия 6. Счетный вход счетчика 26 длины подключен к выходу звена ИЛИ 28, а счетный вход (+) счетчика 26 длины подключен к вьгходу звена И 29. Управляющий С-вход счетчика 26 длины подключен к выходу 21 командного блока 17. Выход 22 последнего подключен к второму входу цифроаналогового преобразователя 10, выход 23 - к второму входу силового преобразователя 12 блока 9 управления, а выходы
24 и 25 - к входам блока 15 управления приводом 3 поперечного перемещения. Входы 18-20 командного блока 17 подключены к выходу злемента 14 сравнения кодов, датчику 5 окончания реза, датчику 16 исходного положения летучей пилы 1 соответственно.
К первому входу звена ИЛИ 28 подключен выход звена И 30, а к второму входу звена ИЛИ 28 - выход синхронизатора 31. К первым входам звеньев И 29 и 30 подключен выход синхронизатора 32, а к вторым входам звеньев И 29 и 30 - соответственно первый и второй выходы импульсного датчика 4. Выходы импульсного датчика 4 подключены соответственно к первому и второму входам звена ИЛИ 33, а выход последнего - к первому входу синхронизатора 32. К первому входу синхронизатора 31
присоединен импульсный датчик 37 перемещения изделия 6, а к вторым входам синхронизаторов 31 и 32 - первый и второй выходы генератора 34 синхрочас- тот соответственно.
На фиг.1 летучая пила 1 показана в положении 35, т. е. в момент окончания отрезания очередной мерной длины L изделия 6. Линия 36 соответ
3
ствует положению линии реза на изделии 6 в следующем цикле, а исхоД11ому положению оси режущего инструмента летучей пилы 1 - линия 37.
Выходы импульсного датчика 4 функ- ционирую таким образом, что на первом выходе, который присоединен к первому входу звена ИЛИ 33 и входу звена И 29 импульсы имеют место при ходе летучей пилы 1 на рез к положению 35, а на втором выходе, который присоединен к второму входу звена ИЛИ 33 и входу звена И 30, импульсы имеют место при возврате летучей пилы 1 в исходное положение 37.
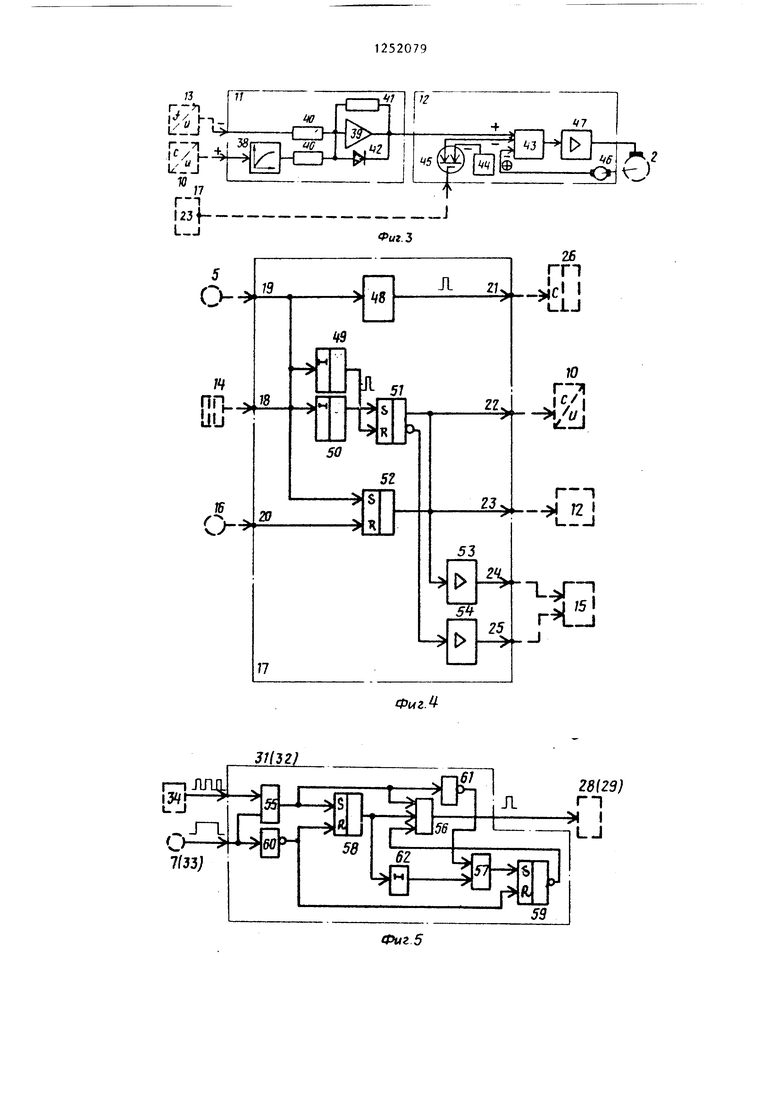
Позиционный регулятор 11 (фиг.З) содержит предназначенный для оптимальной обработки заданных рассогласований параболический преобразователь 38, вход которого подключен к цифрд- анапоговому преобразователю 10, сум- мирую1ций операционный усилитель 3, резисторы 40, резистор 41 обратной связи и присоединенный параллельно усилителю 39 диод 42, обеспечивающий одностороннюю проводимость последнего. Входы усилителя 39 подключены через резисторы 40 соответственно к преобразователю 13 частота-напряжение и параболическому преобразователю 38.
Силовой преобразователь 12 содержит блок 43 регулирования скорости привода 2. Входы блока 43 подключены соответственно к выходу операционного усилителя 39 позиционного регулятора 11, задатчику 44 скорости обратного хода через управляемый ключ 45 и датчику 46 обратной связи по скорости привода 2. Управляемый силовой элемент 47 своим входом подключен к выходу блока 43, а выходом - к приводу 2 летучей пилы 1. Управляющий вход ключа 45 подключен к выходу 23 командного блока 17.
Командный блок 17 (фиг.4) содержит одновибратор 48, одновибраторы 49 и 50 с задержкой выходного сигнала, RS-триггеры 51 и 52 и усилители 53 и 54, К входу 19 блока 17, соединенному с датчиком 5 окончания реза, подключены входы одновибраторов 48 и 49 и S-вход триггера 52. К входу 18 блока 17, соединенного с выходом элемента 14 сравнения кодов, подключен S- вход триггера 31 через одновибратор 50 с задержкой выходного сигнала. К входу 20 блока 17, подключенного к выходу датчика 16 исходного положения пилы, присоединен R-вход триггера 52.
1
4
15
20
25
5, 10
2520794
Выход 21 блока 17, присоединенный к С-входу счетчика 26, является выходом одновибратора 48. Выход одновиб- ратора 49 присоединен к R-входу триггера 51. Прямой выход триггера 51 присоединен к входу усилителя 53 и через выход 22 блока 17 - к второму входу цифроаналогового преобразователя 10. Инверсный выход триггера 51 присоединен к входу усилителя 54. Через выход 23 блока 17 выход триггера 52 присоединен к второму входу силового преобразователя 12. Через вькоды 24 и 25 блока 17 усилители 53 и 54 присоединены к входам блока 15 управления приводом 3 поперечного перемещения.
Синхронизаторы 31 и 32 (фиг.5) имеют аналогичную структуру и содержат каждый звенья И 55 г 57,Я$-три1 геры 58 и 59, инверторы 60 и 61 и звено 62 задержки. Первый вход звена И 55 присоединен к одному из выходов генератора 34 синхрочастот, а второй вход звена И 55 и вход инвертора 60- к импульсному датчику 7 перемещения (для синхронизатора 31) или к звену ИЛИ 33 (для синхронизатора 32). Выход звена И 55 присоединен к S-входу триг-г гера 58, а также к входу инвертора 61 и к первому входу звена И 56, к второму входу которого и к входу звена 62 задержки присоединен выход триггера 58. Выходы звена 62 задержки и инвертора 61 присоединены к первому и второму входам звена И 57 соответственно. Выход последнего присоединен к S-входу триггера 59, R-вход которого вместе с R-входом триггера 58 присоединены к выходу инвертора 60. Инверсный, выход триггера 59 присоединен к третьему входу звена И 56, выход которого является выходом синхронизатора и присоединен к входу звена ИЛИ 8 (для синхронизатора 31) и к входу звена И 29 (для синхронизатора 32).
Устройство работает следующим образом.
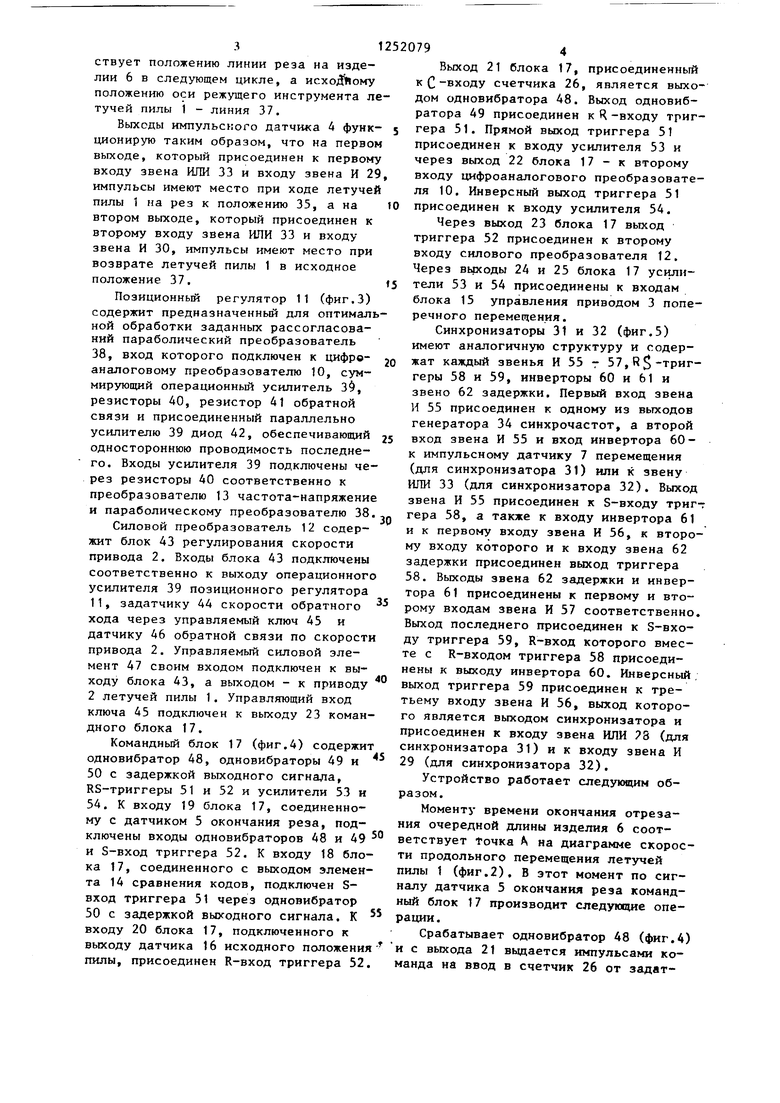
Моменту времени окончания отрезания очередной длины изделия 6 соответствует Точка А на диаграмме скорости продольного перемещения летучей пилы 1 (фиг.2). В этот момент по сигналу датчика 5 окончания реза командный блок 17 производит следуюоше операции.
Срабатывает одновибратор 48 (фиг.4) и с выхода 21 вьщается импульсами команда на ввод в счетчик 26 от задат30
40
5
512
чика 27 длины числа, соответствующего заданной мерной длине L изделия 6. При этом в счетчике 26 фиксируется положение линии реза 36 на изделии 6 в следующем цшсле относительно текущего положения оси 35 летучей пилы 1 в текущем цикле реза. Одновременно срабат ывает триггер 52 (фиг.4) и отключается триггер 51. С выхода 23 вы
дается команда реверса силового преоб-ю вании датчика 16 отключаются триггер
разователя 12 и привода 2 для возврата летучей пилы 1 в исходное положение 37, а с выхода 22 снимается сигнал запрета работы цифроаналогового
преобразователя 10. Командой с выхода 15 вается в исходном положении 37. При
23 блока 17 включается управляемый ключ 45 в преобразователе 12, которым подключается к входу блока 43 регулирования задатчик 44 скорости обратного хода.
Одновременно с реверсом привода 2 по сигналу усилителя 54 с выхода 25 блока 17, подаваемому на вход блока 15, реверсируется для возврата в исходное положение привод 3 поперечног перемещения летучей пилы 1 (с усилителя 53 и выхода 24 блока 17 сигналы при этом снимаются). В процессе обратного хода летучей плиты 1 счетчик 26 длины не прекращает фиксации непрерывно уменьшающегося текущего расстояния L линии реза 36 на изделии 6 до оси летучей пилы 1. Это обеспечивается тем, что к вычитающему входу (-) счетчика 26 непрерывно поступают сигналы импульсного датчика 7 перемещения изделия 6 и сигналы с выхода (-) импульсного датчика 4 перемещения летучей пилы 1. Сигналы датчика 7 проходят через синхронизатор 31 и звено ИЛИ 28, а сигналы датчика 4 - через звено ИЛИ 33, синхронизатор 32 звено 30 и звено ИЛИ 28. Синхронизаторы 31 и 32 раздвигают во времени сигналы датчиков 4 и 7(фиг,5, временная диаграмма), так как счетчиком 26 каждый из них может восприниматься только при несовпадении их во времени. При этом текущее число на выходе счетчика 26 соответствует расстоянию
L k - u - ,(1)
где f - текущее перемещение изделия
6; t - текущее перемещение летучей
пилы 1.
Несмотря на то, что при обратном ходе пилы 1 перемещения изделия 6 Е и пилы 1 f направлены встречно, в счетчик
ь направлены встречно, 26 они вводятся с oдинaкoвы ra
6
знаками, так как при этом ось пилы 1 сближается с линией реза 36 на изделии 6, т. е. расстояние L уменьшается ,
В момент времени В (фиг.2) датчик 16 исходного положения пилы подает сигнал на вход 20 командного блока 17 для останова летучей пилы 1 в исходном положении 37. При срабаты52 блока 17 (фиг.4) и ключ 45 в блоке 12 (фиг.З): от блока 43 отключается задатчик 44 скорости обратного хода, привод 2 замедляется и останавли20
0
5
5
0
5
0
5
этом выход усилителя 39 позиционного регулятора 11 остается нулевым, так как сигнал на входе усилителя 39 со стороны счетчика 26 дЦ превышает сигнал со стороны датчика 7 и преобразователя 13 частота-напряжение U,, проводимость усилителя 39 при этом нулевая. В момент времени в (фиг.2) привод 2 останавливается. Высокая точность останова оси летучей пилы 1 в положении 37 не требуется, поскольку датчиками 4 и 7 непрерывно фикси- .руется текущее расстояние L (1) меж- |ду линией реза 36 на изделии б и осью летучей пилы 1 независимо от места нахождения последней.
В процессе перемещения изделия 6 уменьшается выходной сигнал L (1) счетчика 26 длины и соответственно уменьшается вьгходной сигнал цифроана- логового преобразователя 10.
На участке диаграммы В -Г (фиг.2) сигнал ли превышает на входе позиционного регулятора 11 задающий сигнал U преобразователя 13 частота-напряжение, соответствующий скорости перемещения изделия 6. Но как и на участке В-6 , позиционный регулятор 11, имеющий од- нополярный выход, не пропускает сигналы отрицательной полярности на вход силового преобразователя 12, и задание скорости последнему остается нулевым.
В момент времени Г (фиг.2) расстояние L (1) уменьшается настолько, что сигнал ли уравнивается с сигналом U, и при дальнейшем перемещении изделия 6 становится меньше сигнала U. Появляется задающий сигнал скорости на входе блока 43 регулирования силового преобразователя 12, привод 2 начинает разгоняться, отрабатывая с помощью датчика 46 скорости задающий сигнал на входе позиционного регулятора 11.
При разгоне летучей пилы 1 в направлении движения изделия 6 ось пилы 1 начинает удаляться от линии реза 36 на изделии 6. При этом происходит переключение сигналов датчика Д с его выхода (-) на вход (+) и соответственно звеньями И 29 и И 30 с входа (-) на вход (+) счетчика 26 (цепь синхронизатор 32 - звено И 29). Текущее число L на выходе счетчика 26 начинает соответствовать вмражению
I. L. - {„ -ь t , .(2)
так как направление Е изменяется на противоположное. Однако текущее перемещение f превьппает перемещение -Е, так как скорость U изделия 6 превышает скорость и„ пилы 1, и поэтому расстояние L (2) непрерывно уменьшается .
В момент времени Д (фиг.2) происходит совмещение оси летучей пилы 1 с линией реза 36, т, е. расстояние L (2) становится нулевым, соответственнэ иу20 его инверсном выходе, появляется импульс на выходе звена И 56, который совпадает во времени с импульсом синхрочастоты генератора 34. Этот одиночный импульс является выходным сигналевым становится сигнал ли на входе позиционного регулятора 11, и скорость з лом синхронизатора 31(32), соответ- Un продольного хода летучей пилы 1 ств ющим одному импульсу датчика 7 уравнивается со скоростью U,, изделия или 4. При исчезновении импульса син- 6. При этом на выходе элемента 14 хрочастоты появляется сигнал на вьгхо- сравнения кодов и на входе 18 командного блока 17 появляется сигнал. По JQ этому сигналу с некоторой выдержкой времени одновибратора 50, которая обеспечивает отстройку от возможных перерегулирований скорости и„ пилы 1, срабатывает триггер 51 блока 17, и на его выходе, а также на выходе 22 блока t7, появляется команда запрета работы цифроаналогового преобразователя 10, а на выходе усилителя 53 и выходе 24 блока .17 - команда включения привода 3 поперечного перемещения режуще- то устройства летучей пилы 1 для от35
40
45
резания заданной длины Ь„ изделия 6. JB момент времени А (фиг.2) рез заканчивается, срабатывает датчик 5 окончания реза, и цикл работы устройства повторяется.
Переключение сигналов датчика 4 с входа (-) на вход (+) счетчика 26 производится звеньями И 30 и 29 благодаря подаче на их входы, кроме выходных сигналов синхронизатора 32, также сигналов датчика 4 соответственно (-) для хода Назад и () для хода Вперед, На синхронизирующие вхо30
де инпетора 61, и при включенном триггере 58 включается через звено И
57триггер 59, снимая разрешение на прохождение сигналов через звено И 56. После окончания импульса датчика 7 или 4 появляется сигнал на выходе инвертора 60 и отключаются триггеры
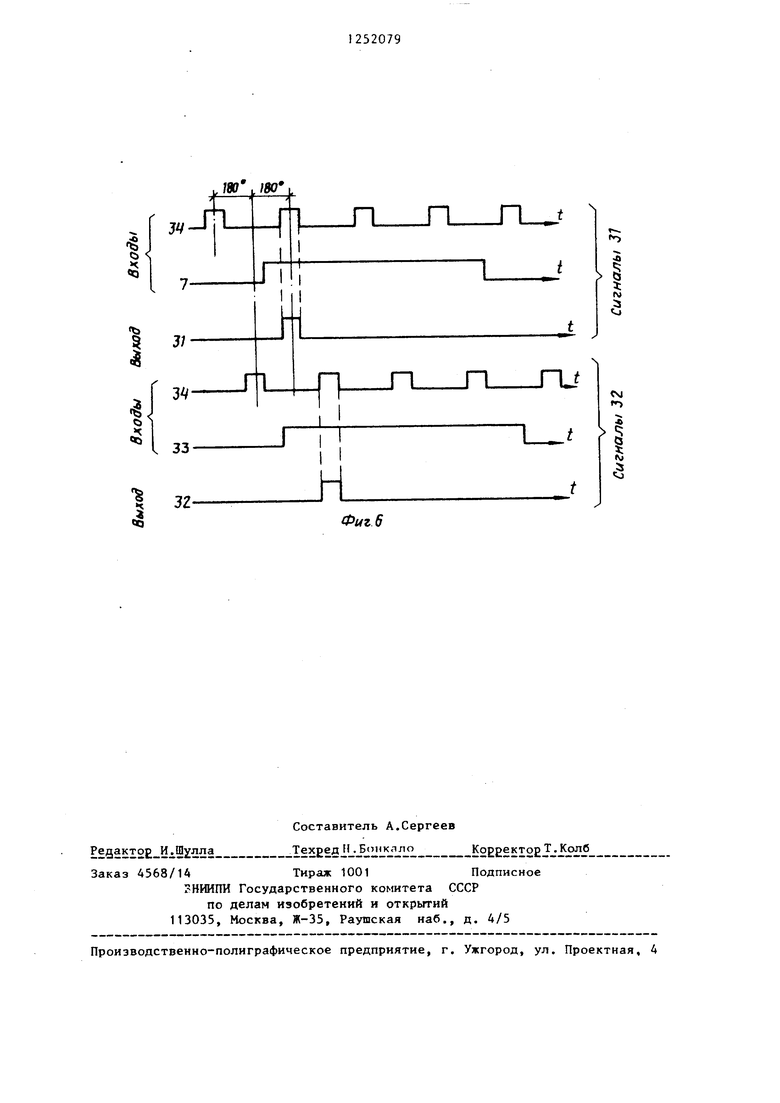
58и 59. Затем цикл повторяется. Звеном 62 задержки предотвращаются ложные срабатывания триггера 59, если триггер 58 вкщрчается быстрее, чем исчезает сигнал с выхода инвертора 61 (т. е. исключает состязания). Благодаря сдвигу на 180° фаз синхрочас- тот генератора 34 исключается совпадение во .времени выходных сигналов синхронизаторов 31 и 32.
Таким образом, дополнением известного устройства импульсным датчиком перемещения пилы, синхронизаторами, генератором синхрочастот, звеньями И и ИЛИ расширяется область использования предлагаемого устройства, а именно появляется возможность применения его для разрезания изделий из сортовых замкнутых профилей со сложной формой поперечного сечения.
ды синхронизаторов 31 и 32 (фиг.5) подаются от генератора 34 синхрочас- тот две серии синхронизирующих час- . тотных сигналов, сдвинутых между со- бой по фазе на 180 эл. град,, т. е. раздвинутые во времени. Частота синхррниз р тощих сигналов генератора 34 значительно превышает частоту сигналов датчиков 4 и 7 (в 5-10 раз)
(фиг.5, временная диаграмма).
При первом совпадении во времени импульсов синхрочастоты генератора 34 и датчика 7 на входах синхронизатора 31 либо датчика 4 (через звено ИЛИ
33) на входах синхронизатора 32 срабатывает триггер 58, так как при этом исчезает сигнал с запрещающего выхода инвертора 60. Поскольку триггер 59 еще не включен и имеется сигнал на
его инверсном выходе, появляется импульс на выходе звена И 56, который совпадает во времени с импульсом синхрочастоты генератора 34. Этот одиночный импульс является выходным сигналом синхронизатора 31(32), соответ- ств ющим одному импульсу датчика 7 или 4. При исчезновении импульса син- хрочастоты появляется сигнал на вьгхо-
лом синхронизатора 31(32), соответ- ств ющим одному импульсу датчика 7 или 4. При исчезновении импульса син- хрочастоты появляется сигнал на вьгхо-
де инпетора 61, и при включенном триггере 58 включается через звено И
57триггер 59, снимая разрешение на прохождение сигналов через звено И 56. После окончания импульса датчика 7 или 4 появляется сигнал на выходе инвертора 60 и отключаются триггеры
58и 59. Затем цикл повторяется. Звеном 62 задержки предотвращаются ложные срабатывания триггера 59, если триггер 58 вкщрчается быстрее, чем исчезает сигнал с выхода инвертора 61 (т. е. исключает состязания). Благодаря сдвигу на 180° фаз синхрочас- тот генератора 34 исключается совпадение во .времени выходных сигналов синхронизаторов 31 и 32.
Таким образом, дополнением известного устройства импульсным датчиком перемещения пилы, синхронизаторами, генератором синхрочастот, звеньями И и ИЛИ расширяется область использования предлагаемого устройства, а именно появляется возможность применения его для разрезания изделий из сортовых замкнутых профилей со сложной формой поперечного сечения.
36
Го
8
иы
yr 35
7-k . 0п
5
К
с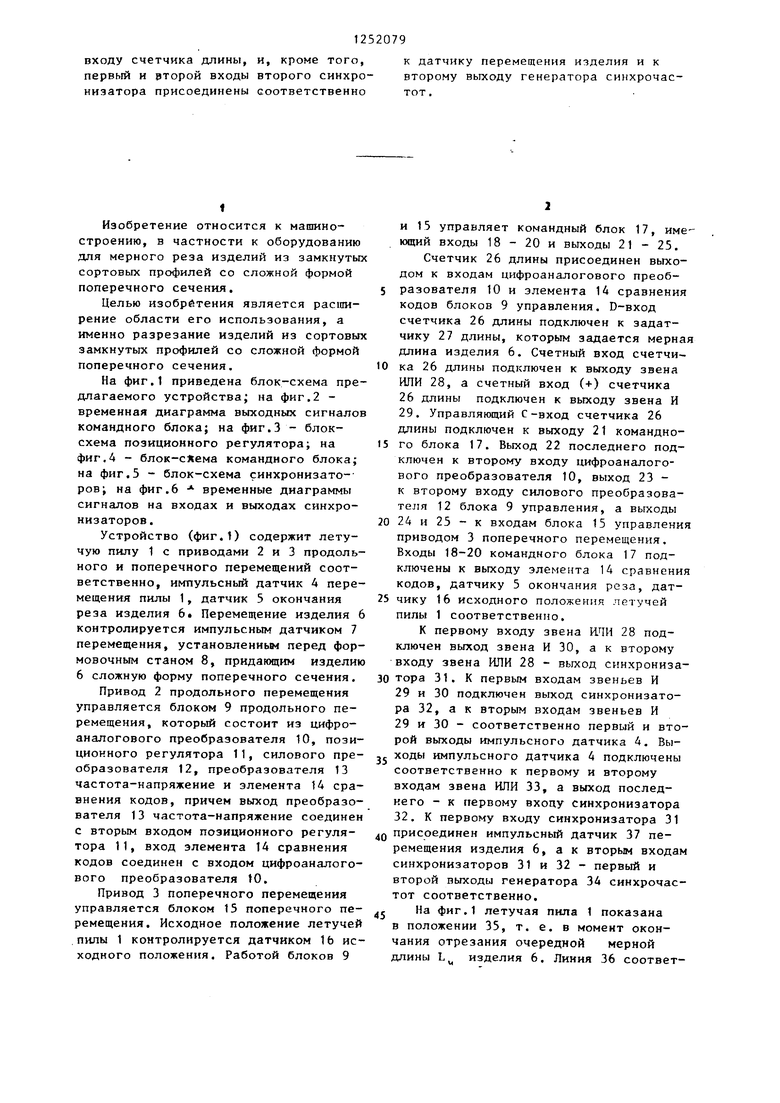

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления летучей пилой | 1983 |
|
SU1109270A1 |
| Устройство управления летучей пилой | 1982 |
|
SU1072991A1 |
| Устройство управления летучей пилой | 1979 |
|
SU998017A1 |
| Система управления агрегатом производства трехслойных панелей | 1985 |
|
SU1398940A1 |
| Линия для непрерывного изготовления гофрированных полос | 1987 |
|
SU1496854A1 |
| Электропривод отрезного устройства | 1982 |
|
SU1058726A1 |
| Система управления непрерывным полосовым агрегатом | 1984 |
|
SU1219195A1 |
| Способ управления станом с перфорацией и порезкой гнутых профилей на ходу и устройство для его осуществления | 1989 |
|
SU1680406A1 |
| Способ непрерывного изготовления металлических обшивок для панелей с утеплителем и устройство для его осуществления | 1989 |
|
SU1735028A1 |
| Способ изготовления наружных обшивок для кровельных панелей с утеплителем и устройство для его осуществления | 1990 |
|
SU1784418A1 |
В П
(///7/
л
д
I
V////A
I5V/////// ////// ///////j(/////.
в t
//////Л
Фиг.2.
Фиг.
Фиг 5
| Устройство управления летучей пилой | 1979 |
|
SU998017A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Устройство управления летучей пилой | 1982 |
|
SU1072991A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
