11 Изобретение относится к машиностроению, в частности к конструкции систем автоматического управления летучими отрезными механизмами, производящими деление на мерные длины движущихся изделий. Известно устройство управления летучей пилой, содержащее датчики ск рости и перемещения летучей пилы и и делия, задатчик отрезаемой длины, счетчик длины, блоки управления приводами продольного и поперечного перемещения, командный блок tl Недостатком этого устройства является отсутствие в нем датчика изме рения относи7ельного перемещения летучей пилы и изделия, из-за чего сни жается точность отрезания мерных дли изделия. Кроме того, устройство не обеспечивает точности отрезания первой мерной длины изделия. Наиболее близким к предлагаемому по технической сущности и достигаемо му результату является устройство уп равления летучей пилой, содержащее электрически соединенные между собой задатчик отрезаемой длины, первый счетчик длины, командный блок, блоки управления приводами продольного и поперечного перемещения, датчики ско рости изделия, относительного переме щения летучей пилы и изделия, , исходного положения летучей пилы С2 Недостаток известного устройства низкая точность отрезания первой мер ной длины и изделия. Целью изобретения является повыше ние точности отрезания первой мерной длины изделия. Поставленная цель достигается тем что устройство управления летучей пи ненные между собой задатчик отрезаемой длины, первьш счетчик длины, командный блок, блоки управления приводами продольного и поперечного перемещений, датчики скорости изделия, относительного перемещения летучей пшты и изделия, реза, исходного поло жения летучей пилы, дополнительно снабжено вторым счетчиком длины, блоком сравнения кодов, триггером, датчиком относительного перемещения летзчей пилы и изделия и элементом И причем первый вход второго счетчика длины соединен с .датчиком относитель його перемещения летучей пилы и изделия, а выход соединен с входом блока сравнения кодов, выход которо0го соединен с первым входом триггера, второй вход триггера соединен с командным блоком, а выход - с первым входом элемента И, второй вход которого соединен с датчиком относительного перемещения летучей пилы и изделия р а выход - с первым входом первого счетчика длины, кроме того, второй вход второго счетчика длины соединен с выходом триггера, а второй выход датчика относительного перемещения летучей пилы и изделия соедгнен со вторым входом первого счетчика длины и блоком управления приводом продольного перемещения. На фиг.1 приведена функциональная схема предлагаемого устройства, на фиг.2 - диаграмма, поясняющая его работу, на фиг, 3 - структурно-принципиальная схема командного блока. Устройство содержит летучую пилу 1 с приводам 2 и 3 соответственно продольного и поперечного перемещения, датчиком 4 относительного перемецения летучей пилы 1 и изделия 5 и датчиком 6 реза. Летучая пила 1 разрезает движущееся изделие 5 на заданные мерные длины. Скорость изделия 5 контролируется датчиком 7 скорости, механически связанным со следящими роликами 8. Приводом 2 продольного перемещения управляет блок 9 управления, содержащий последовательно включенные цифроаналоговый преобразователь 10, позиционный регулятор 11, силовой преобразователь 12, а также преобразователь 13 частота - напряжение, звено 14 сравнения кодов, нуль-орган 15 и элемент 16 И. При этом выход цифроаналогового преобразователя 13 соединен со вторым входом позиционного регулятора 11, вход звена 1А сравнения кодов соединен со входом цифроаналогового преобразователя 10, выходы звена 14 :и нуль-органа 15 соединены соответственно с первым и вторым входами элемента 16 И. Работой блока 9 управляет командньй блок 17, имеющий входы 18-20 и выходы 21-26. Счетчик 27 длины присоединен своим выходом ко входу цифроаналогового преобразователя 10 и ко входу звена 14 сравнения кодов блока 9 управления. Счетные въоды плюс и мигтус счетчика 27 длины и два входа нульоргана 15 присоединены соответственно к первому и второму выходам датчика 4 относительного перемещения летучей пилы 1 и изделия 5, при этом вход счетчика 27 длины подключен к первому выходу датчика 4 через элемент 28 И. L -вход счетчика 27 длины подключен к задатчику 29 отрезаемой длины, а управляющий С-вход счетчика 27 подключен к выходу 21 командного блока 17. Выход 22 последнего подключен ко второму входу цифроаналогового преобразователя 10, выход 23 - ко второму входу силового преобразователя 12 блока 9 управления, а выходы 24 и 25 - к входам блока 30 управления приводом 3 поперечного перемещения. Входы командного блока 17 подключены: вход 18 - к выходу элемента 16 И, вход 19 - к дагчику 6 реза, вход 20 - к датчику 31 исходного положения летучей пилы 1. Первый выход датчика 4 относитель ного перемещения летучей пилы 1 и изделия 5 подключен также к счетному входу счетчика 32 длины, последовательно включенного с блоком 33 сравнения кодов, триггером 34 и вторым входом элемента 28 И. Второй вхо счетчика 32 длины подключен к выходу триггера 34, а второй вход последнего подключен к выходд 26 командного блока 17. Линия 35 (фиг.1) соответствует оси реза летучей пилы 1. Выходы датчика 4 относительного перемещения летучей пилы 1 и изделия 5 функционируют следующим образом: на первом выходе, который подключен к счетному входу счетчика 32 длины и через элемент 28 И к вычитающему входу счетчика 27 длины, имеются сиг налы, когда скорость пилы 1 меньше скорости изделия 5 (в том числе и при обратном ходе пилы 1), на втором выходе, который подключен к суммирующемувходу счетчика 27 длины, имеются сигналы, когда скорость пилы 1 превышает скорость изделия 5. Послед ний случай имеет место при перерегулировании скорости летучей пилы 1 в процессе отработки заданного рассогласования в положениях линии реза на изделии 5 и оси реза летучей пилы 1. Командный блок 17 Сфиг.З) содержит датчик 36 контроля изделия 5, одновибраторы 37 и 38, одновибратор 39 с задержкой выходного в сигнала, элемент 40 ИЛИ, Э -триггеры 41 и 42 и усилители 43 и 44. Входы одновибраторор 37,39 и S -вход триггера 42 подключены ко входу 19 блока и к датчику 6 окончания реза. Выходы одновибраторов 37 и 38 подключены ко входам элемента 40 ИЛИ, выход которого присоединен к выходу 21 блока и к С-входу счетчика 27. Вход одновибратора 38 присоединен к датчику контроля изделия 5. Выход одновибратора 39 присоединен к С-входу триггера 41, которого присоединен ко входу 18 блока и к выходу элемента 16 И, а выходы триггера 41 присоединены: прямой - к входу 22 блока и к цифроаналоговому преобразователю 10, а также ко входу усилителя 43, инверсный - ко входу усилителя 44. Выходы последних в свою очередь присоединены к выходам соответственно 24 и 25 блока и ко входам блока 30 управления приводом 3 поперечного перемещения. С.-ВХОД триггера 42 присоединен ко входу 20 блока и к датчику 31 исход-, ного положения пилы 1, а выход триггера 42 присоединен к выходу 23 блока и к силовому преобразователю 12. Устройство работает следующем образом. В момент времени А (фиг.2) передний конец движущегося изделия 5 входит в соприкосновение с датчиком 4. На первом выходе датчика 4 появляются сигналы, частота которых при стоящей летучей пиле 1 пропорциональна скорости перемещения изделия 5(УцУ Сигналы датчика 4 поступают на счетньй вхол счетчика 32 длины выход КОТОРОГО увеличивается пропооционально удалению переднего конца изделия 5 от датчика 4. На вычитающий вход счетчика 27 длины сигналы датчика 4 не пропускает элемент 28 И, так как отсутствует сигнал на его втором входе. В момент времени С (фиг.2) передний конец изделия 5 достигает оси 35 реза летучей пилы 1, что соответствует прохождению передним концом изделия 5 от датчика 4 пути С .При этом выход счетчика 32 длины становится равным числу fy; , срабатьшает блок 33 сравнения кодов и включается триггер 34. Триггер 34 подает сигнал на второй вход элемента 28 И и гасит счетчик 32 длины. Сигналы с первого выхода датчика 4 начинают проходить на вычитающий вход счетчика 27 длины, п KOTopbiff предварительно по команде с выхода 21 командного блока 17 от эадатчика 29 длины введено число Lj , соответствующее мерной длине отрезания изделия 5. Сигналы выхода счетчика 27 длины и соответственно выхода цифроаналогового преобразователя 10 блока 9 управления начинает уменьшаться. На участке диаграммы А-В (фиг.2) сигнал uV выхода цифроаналогового преобразователя 10 превышает на входах позиционного регулятора 11 задающий сигнал Ui преобразователя 13 частота-напряжение, соответствующий скорости изделия 5, измеряемой датчиком 7 скорости. Позиционный регулятор 11, имеющий однополярный выход не пропускает сигналы отрицательной полярности на вход силового преобразователя 12, и задание последнему сохраняется нулевым. В моменг времени В (фиг. 2) сигнал 1/ у 1авнивается с сигналом /п и при дальнейшем перемещении изделия 5 си; нал д1/ становится меньше сигнала V . оявляется задающий сигнал скорости на входе силового преобразователя .12, привод 2 начинает разгоняться, отрабатывая задающий сигнал - а V на входе позиционного регулятора 11. В момент времени р (фиг.2) происходит совме1чение оси 35 реза летучей пилы 1 с линией реза на изделии 5, которая отстоит от переднего конца последнего на расстоянии 1., сигнал становится нулевым и скорость V продольного перемещения летучей пилы 1 уравнивается со скоростью 17ц перемещения изделия 5. При этом уменьшает ся до нуля частота импульсов на выхо де датчика 4, становятся нулевым сигнал на входе нуль-органа 15 и последний срабатывает. Одновременно обнуляется выход счетчика 27 длины и на выходе звена 14 сравнения кодов появляется сигнал. При наличии сигна лов на обоих входах злемента 16 И по является сигнал на его выходе и на 1входе 18 командного блока 17. По этому сигналу срабатывает триггер 41 (фиг.З) и на выходе 22 блока 17 появляется команда запрета работы циф,роаналогового преобразователя 10, а на выходе усилителя 43 и на выходе усилителя 43 и на выходе 24 блока 17 команда включения привода 3 поперечного перемещения каретки летучей 70 пилы 1 для отрезания перной мерной длины и изделия 5.В момент времени Г (фиг. 2) рез заканчивается, срабатывает датчик 6 реза. По сигналу последнего на вход 19 командный блок 17 производит следующие операции. Од1ювибратор 37 через элемент 40 ИЛИ (фиг.З) и вь)ход 21 блока 17 выдает импульсную команду на ввод в счетчик 27 длины от задатчика 29 числа, соответствующего следующей мерной длине ,ц отрезания изделия 5. Срабатывает триггер 42 (фиг.З) и с выхода 23 выдается команда на реверс силового преобразователя 12 и привода 2 для возврата летучей пилы 1 в исходное положение. Одновременно через одновибратор 39 отключ ется триггер 41 и через Зсилитель 44 по команде с выхода 23 блока 17 на вход блока 29 реверсируется для возврата в исходное положение привод 3 поперечного перемещения каоетки летучей пилы 1 (с усилителя 43 и с выхода 24 блока 17 команда при этом снимается). В процессе обратного хода летучей пилы 1 счетчик 27 длины не прекращает фиксации текущего расстояния линии реза следующей мерной длины изделия 5 от оси реза 35 летучей пилы 1, поскольку на вычитающий вход счетчика 27 подаются сигналы датчика 4 относительного перемещения летучей пилы 1 и изделия 5. В момент времени (фиг. 2) датчик 31 подает сигнал на вход 20 командного блока 17, отключается триггер 42 (фиг.З) и с выхода 23 снимается сигнал реверса привода 2. -Привод 2 продольного перемещения летучей пилы 1 начинает замедляться для останова пилы- 1 в исходном положении. В момент времени-С привод 2 останавливается. Высокой точности останова летучей пилы 1 в исходном положении не требуется, поскольку датчик 4 непрерывно фиксирует относительное положение линии реза на изделии 5 и оси реза 35 независимо от положения летучей пилы 1. Далее цикл повторяется. После ухода заднего конца изделия 5 из зоны летучей пилы 1 срабатывает датчик 36 (фиг.З), одновибратор 38 командного блока 17, и с выхода 26 выдается сигнал сброса триггера 32, а через элемент 40 ИЛЯ с выхода 21 сигнал ввода в счетчик 27 длины за711092708
данной мерной длины Lц отрезания из- элементом И, а также связям между ниделия 5.ми и элементами известного устройстТаким образом,, благодаря оснаще- на обеспечивается повьш1ение точноснию устройства вторым счетчиком дли- ти отрезания первой мерной длины изны, блоком сравнения кодов, триггероь,5 делия.
/ГJ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления летучей пилой | 1982 |
|
SU1072991A1 |
| Устройство для управления летучей пилой | 1985 |
|
SU1252079A1 |
| Устройство управления летучей пилой | 1979 |
|
SU998017A1 |
| Устройство для раскроя на ходу холодногнутого профиля | 1987 |
|
SU1484411A1 |
| Способ изготовления наружных обшивок для кровельных панелей с утеплителем и устройство для его осуществления | 1990 |
|
SU1784418A1 |
| Линия для непрерывного изготовления гофрированных полос | 1987 |
|
SU1496854A1 |
| Способ управления станом с перфорацией и порезкой гнутых профилей на ходу и устройство для его осуществления | 1989 |
|
SU1680406A1 |
| Способ непрерывного изготовления металлических обшивок для панелей с утеплителем и устройство для его осуществления | 1989 |
|
SU1735028A1 |
| Система управления приводом летучих ножниц | 1977 |
|
SU778956A1 |
| Устройство управления мерным резом проката | 1980 |
|
SU927422A1 |
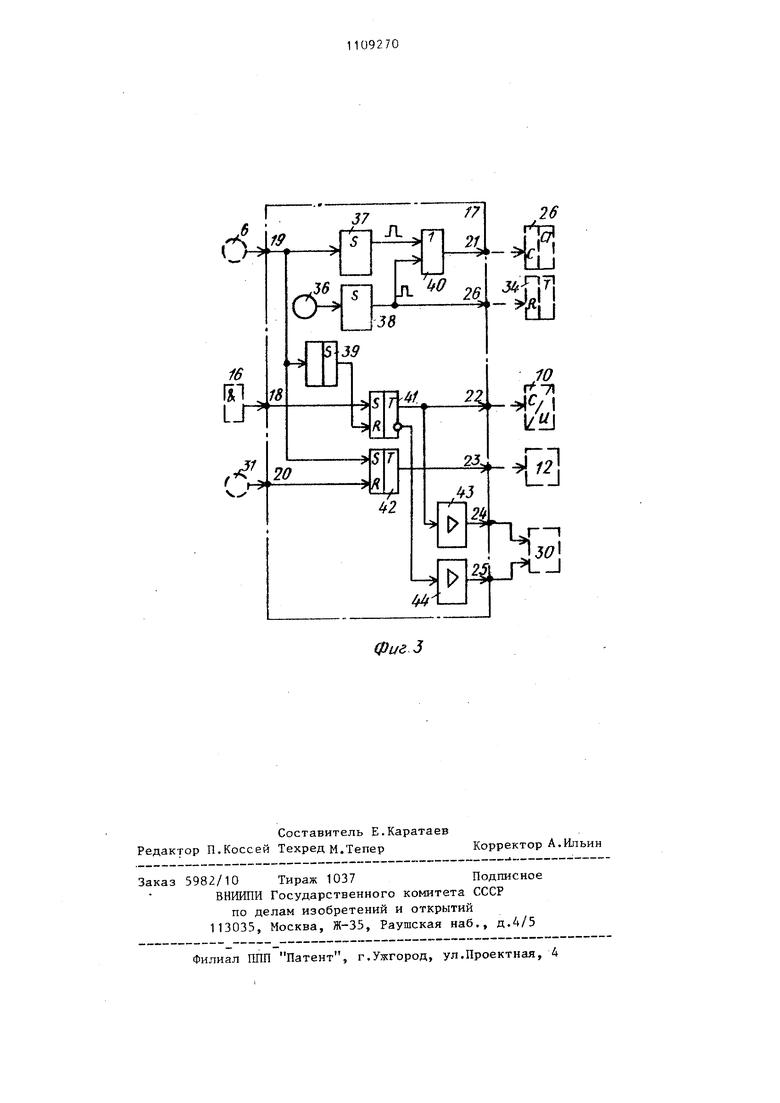
УСТРОЙСТВО УПРАВЛЕНИЯ ЛЕТУЧЕЙ ПИЛОЙ, содержащее соединенные между собой задатчик отрезаемой длины, первый счетчик длины, командный блок, блоки управления приводами продольного и поперечного перемещений, датчики скорости изделия, реза, исходного положения летучей пилы, отличающееся тем, что, с цепью повышения точности отрезания первой мерной длины, оно дополнительно снабжено вторым счетчиком длины, блоком сравнения кодов, триггером, датчиком относительного перемещения летучей пилы и изделия и элементом И, причем первьм вход второго счетчика длины соединен с датчиком относительного перемещения летучей пилы и изделия, а выход соединен с входом блока сравнения кодов, выход которого соединен с первым входом триггера, второй вход триггера соединен с командным блоком, а выход - с первым входом элемента И, второй вход которого соединен с датчиком относительного перемещения летучей пилы и изделия, а выход - с первым входом первого счетчика длины, кроме того, второй (П вход второго счетчика длины соединен с выходом триггера, а второй выход датчика относительного перемещения летучей пилы и изделия соединен со вторым входом первого счетчика длины ;и блоком управления приводом продольного перемещения.
///////////////А k//-/ yv// 1-1
Фиг 1
//// -Н±Z±
Фиг 3
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство управления летучей пилой | 1979 |
|
SU998017A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 352371 3, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
