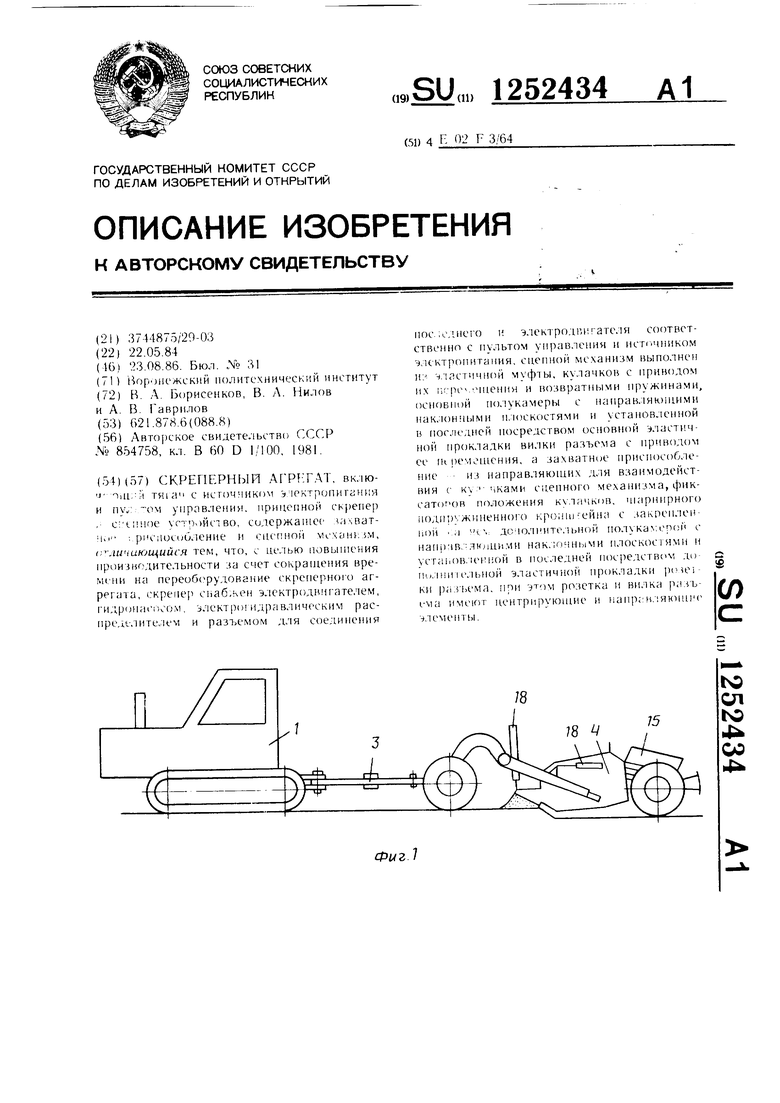
Изобретение относится к землеройно- транспортным машинам и может быть использовано для повышения производительности скреперных агрегатов.
Цель изобретения -- повышение производительности за счет сокращения времени на переоборудование скреперного агрегата.
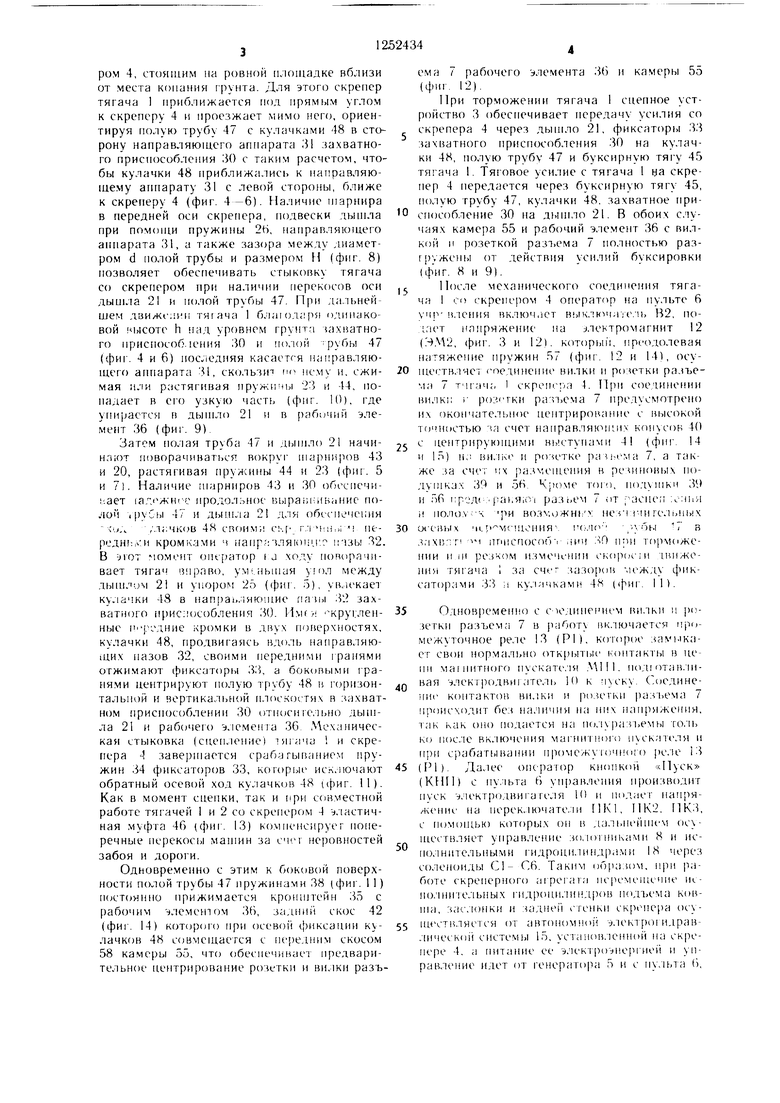
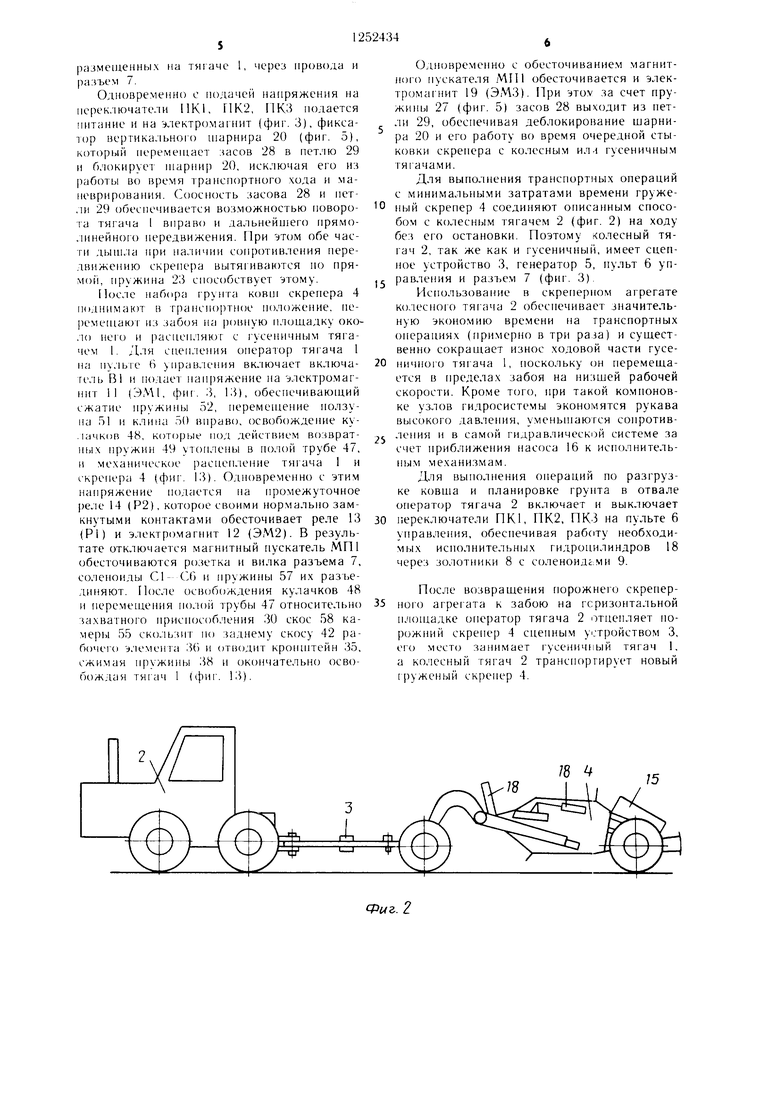
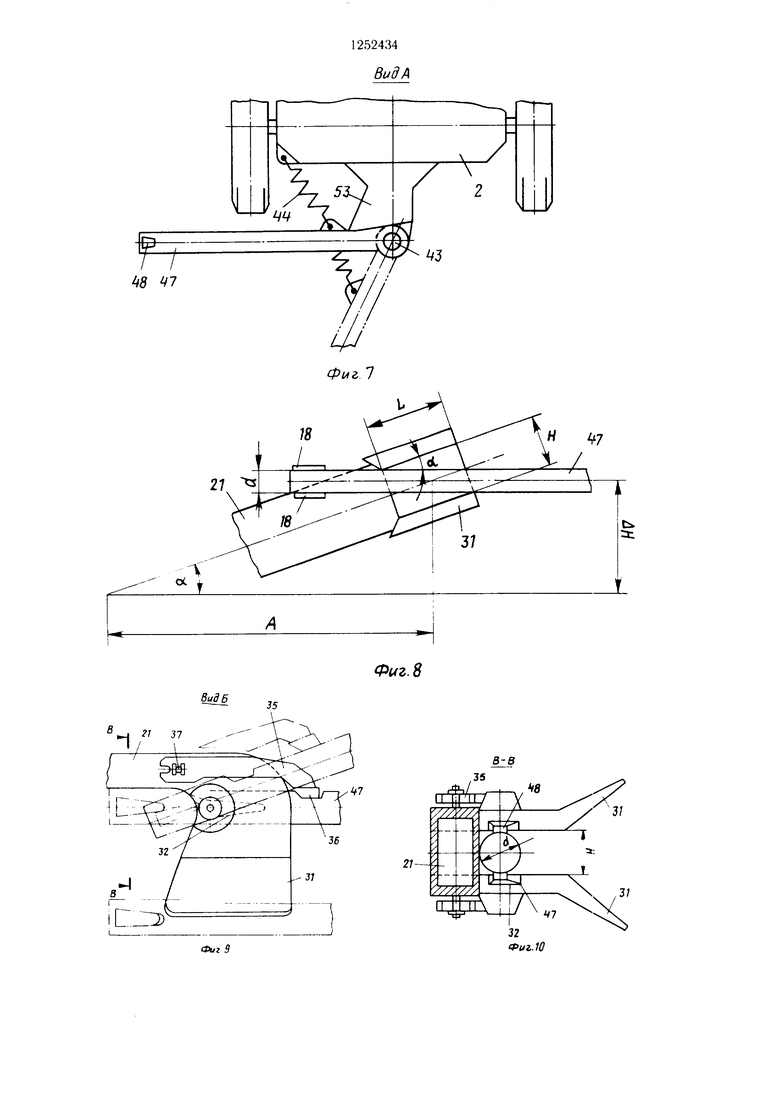
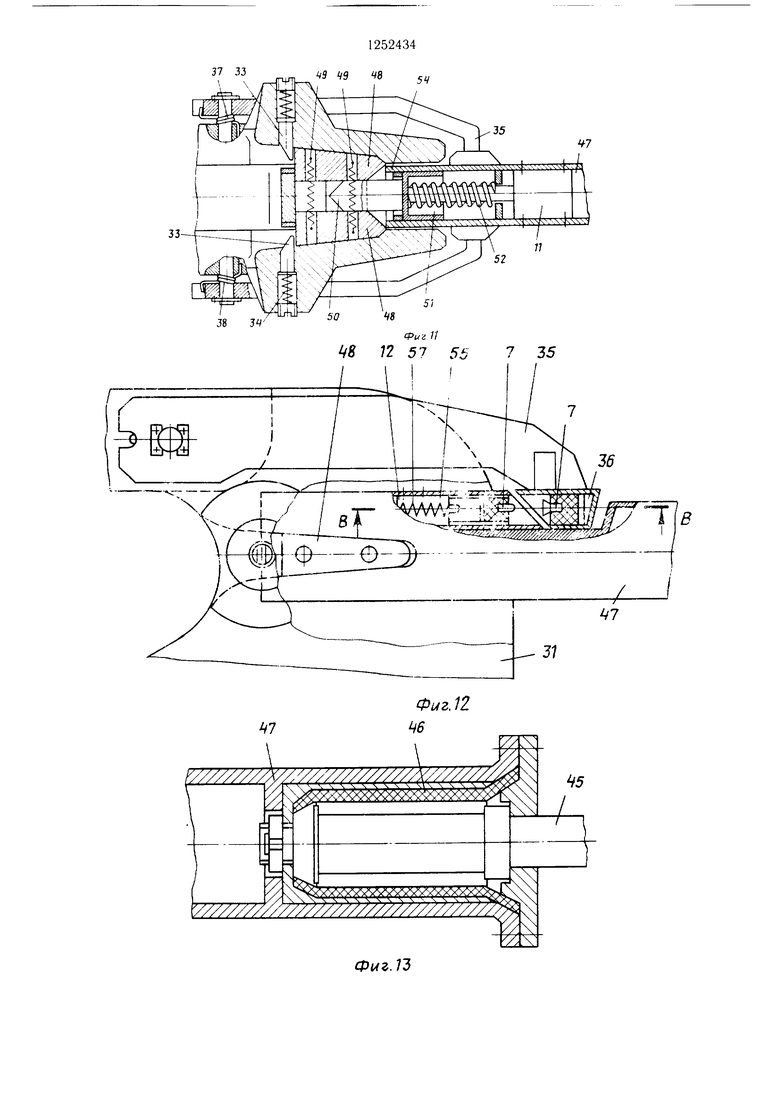
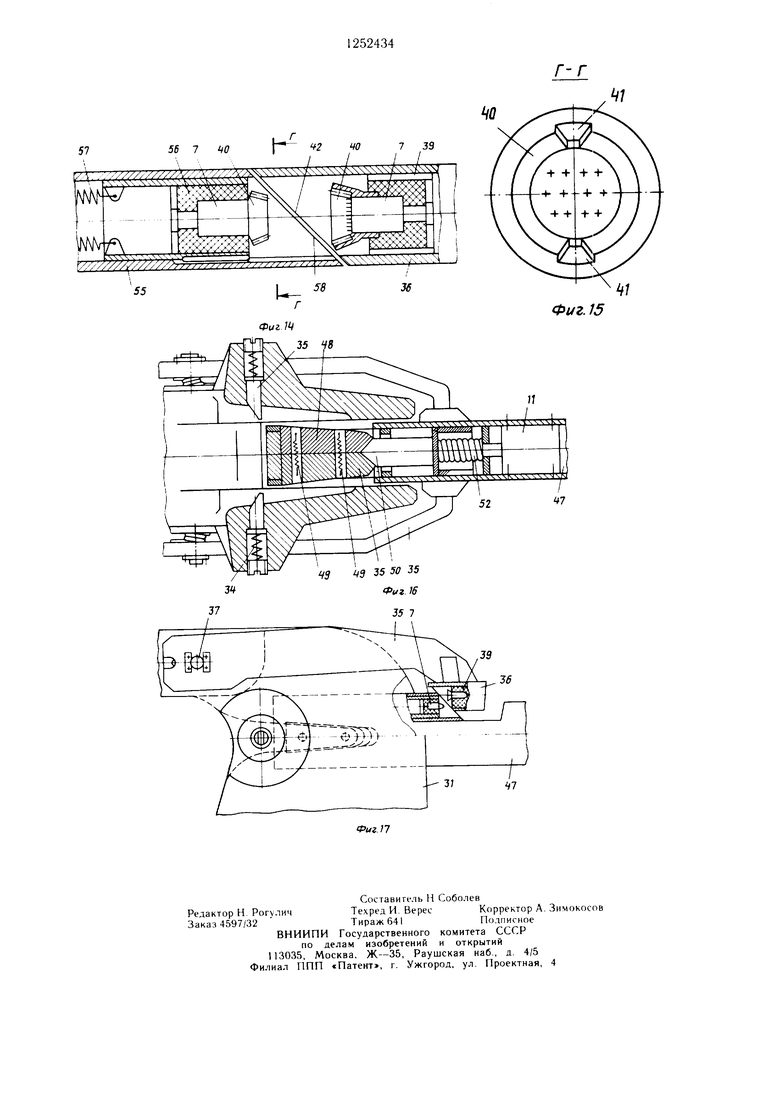
На фиг. 1 и 2 изображен скрепернь т агрегат на тяговом и транспортном режиме; на фиг. 3 - схема управления скреперным агрегатом; на фиг. 4 и 5 - размещение элементов сцепного устройства на скрепере; на фиг. 6 -- то же, на тяг аче; на фиг. 7 - вид А на фиг. 6; на фиг. 8 - схема захвата сцепного устройства; на фиг. 9 - вид Б на фиг. 4; на фиг. 10 - разрез В-В на фиг. 9; на фиг. 11 - сцепное устройство в сочлененно.м положении; на фиг. 12 - то же, вид сверху; на фиг. 13 - эластичная муфта сцепного устройства; на фиг. 14 - розетка и вилка разт.ема; на фиг. 15 - разрез Г-Г на фиг. 14 (направляющий конус и цент- рируюЕцие выступы); на фиг. 16 и 17 - сцепное устройство в момент расцепки.
Скреперный агрегат состоит из гусеничного тягача 1, используемого на тяговом, и колесног о тягача 2 - на транспортном режимах работы, соединенных быстродей- ствую1цим сцепным устройством 3 (фиг. 1 и 2) с прицепным скрепером 4. На тягачах 1 и 2 устапов-лены источник 5 электропитания (генератор) и пульт 6 управления, соединенные с рмлкой и розеткой разъема 7 сцепного устройства 3 электрическими линиями связи (фи1 3). Пульт 6 управления включает трансформатор Тр 1, 1ереключатели Г1К1, ПК2, ПКЗ, управляющие работой электро- гидраил1 ческих распределителей 8 через соленоиды 9 (С -С), магнитный пускатель МГ11 электродвигателя 10 с кнопками «Г1уск (КНГ1), «Стой (КИС) и тепловыми реле РТ1 и РТ2. В пульте 6 управления установлены включате.ти В1 и В2, управляющие работой электромагнитов 11 (ЭМ1) и 12 (ЭМ2). используемых для привода элементов cneiiHoi o устройства 3 и реле 13 (Р1) и 14 (Р2), выполняющие функции блокировки.
На прицепном скрепере 4 установлена автономная электрогидравлическая система 15 (фиг. 1 и 2), включающая электродвигатель 10, гидронасос 16, бак 17, блок 8 распределителей с электроуправлением и исполнительные гидроцилиндры 18 (фиг. 3). На нрнцепном скрепере 4 также установлен электромагнит 19 (), подключенный к сети электродвигателя 10 через трансформатор Тр2 и управляющий блокировкой шарнира 20 сцепного устройства 3.
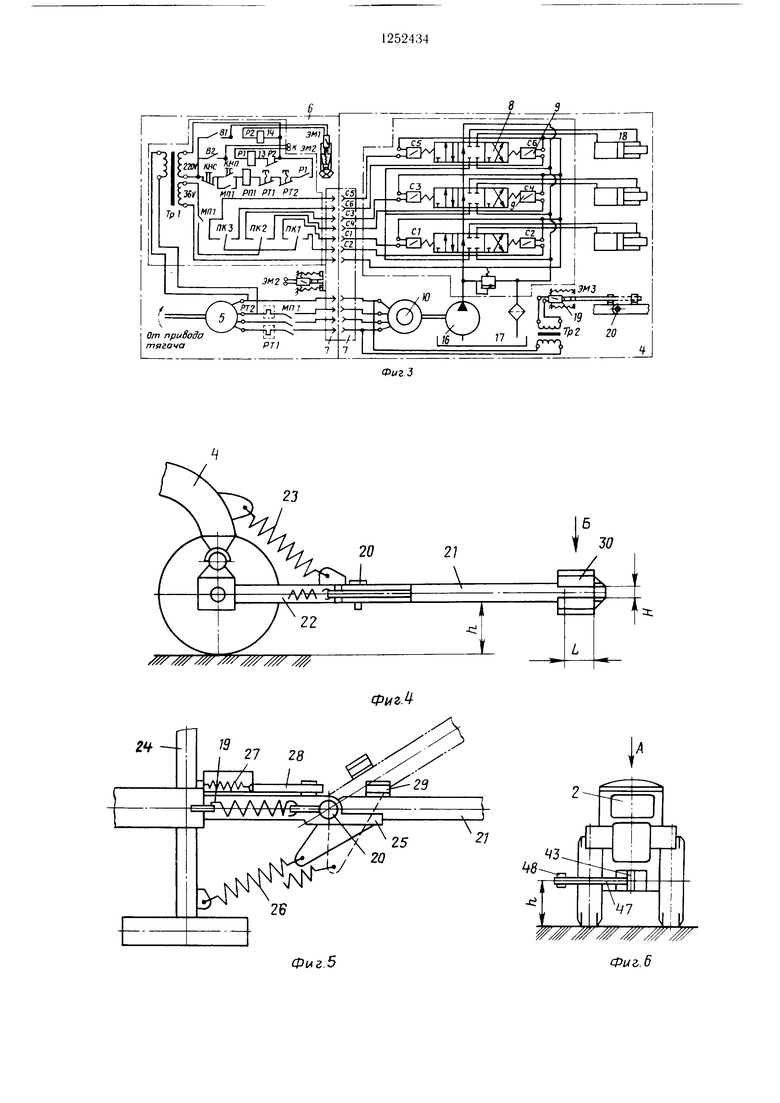
Сценное устройство 3 состоит из дышла 21 (фиг. 4 и 5), соединенного вертикальным щарниром 20 с тяговым брусом 22 и пружиной 23 с передним мостом 24 скрепера 4. Гяговый брус 22 снабжен упором 25,
0
5
ограничивающим поворот дышла 21, и под- веп1ен к скреперу 4 посредством пружины 26, обеспечивающей заданную высоту h дышла 21 над грунтом. На тягсвом брусе 22 установлен электромагнит 19 (ЭМЗ) с возвратными пружинами 27 и засовом 28, а на дышле 21 - петли 29.
На свободном конце дьиила 21- размещено захватное приспособление 30 сцепного устройства 3 в виде вильчатого крюка, ко- торый включает направляющий аппарат 31 (фиг. 10), направляющие пазы 32 и фиксаторы 33 с пружинами 34 (фиг. 11), кронштейн 35 с рабочим элементом 36, закрепленный к дышлу 21 пальцами 37 и пружина- 5 ми 38. В рабочем элементе 36 в резиновых подушках 39 (фиг. 14) эластично установ- .тена вилка разъема 7, соединенная с co. iciiiHi- дами 9 и электродвигателем 10. Вилка и ро зетка разъема 7 снабжены на равляющими конусами 40 и центрирующими выступами 41 Рабочий элемент 36 имеет заданий скос 42.
На тягачах 1 и 2 пocpeдcтвov1 шарнира 43 и пружины 44 закреплена буксирная тяга 45. соединенная эластичной муфтсй 46 с полой трубой 47 (фиг. 13), в которой размещен сценной механизм сцепного устройства 3, имеющий кулачки 48 (фиг. 11) с возвратными пружинами 49, взаимодействуюпи1е с клином 50 ползуна 51, соедин(нного с при- водо.м, состоящим из электромагнита 1 1 и пружины 52. Поворот полой рубы 47 под действием пружины 44 ограничен 1ором 53. Рабочее перемещение ползуна сП в полой трубе 47 ограничено уноро.м 54. Кулачки 48 имеют нагфавляющие грани в двух плоскостях, которые при взаимодействии с направляющими пазами 32 (фнг. 10) обеспечивают центрирование полой трубы 47 в захватном приспособлении 30 (фиг. 9), что способствует соостности щтепсельных полуразъе- емов 7 (фиг. 11 и 12).
В концевой части полой трубы 47 со сто- кронштейна 35 установлена камера 55, в которой в резиновой подущке 56 (фиг. 14) эластично установлена розетка разъема 7. соединенная с генератором 5 и пультом 6 управления, и привод, включающий электромагнит 12 и пружины 57. Камера 55 в передней части имеет скос 58 для взаимодействия с задним скосом 42 рабочего элемента 36. Сцепной механизм вместе с полой трубой 47 и буксирной тягой 45 пружиной 44 удерживают в noлoжe mи, П фпендикуляр- ном продо.тьной оси тя1ача 1, и устанавливают на одинаковой высоте h с захватным устройством 30 от поверхчости грунта (фчг. 4 и 6).
Скреперный ai-регат работает следующим образом.
0
5
0
55
Перед копанием грунта гусеничный тягач 1 посредством сцепного устройства 3 соединяют с порожним прицепным скрепером 4, стоящим на ровной площадке вблизи от места копания грунта. Для этого скренер тягача 1 приближается иод нрямым углом к скреперу 4 и нроезжает мимо него, ориентируя полую трубу 47 с кулачками 48 в сторону направляющего аппарата 31 захватного приспособления iiO с таким расчетом, чтобы кулачки 48 приближались к направляющему агптарату 31 с левой стороны, ближе к скреперу 4 (фиг. 4 - 6). Ыаличие 1ларнира в передней оси скрепера, подвески дыпкта при ПОМОП1И пружнпы 2Ь, направляющего аппарата 31, а также зазора между диаметром d ЮЛОЙ трубы и размере И (фиг. 8) позволяет обеспечивать стыковку тягача со скрепером при наличии перекосов оси дыоита 21 и полой трубы 47. При дальней- щем дзижс;и и тжача 1 блаихтаря одинаковой ысоте h над уровнем грунт.-i ча.хватно- го приспособ. 1СНИЯ 30 н полой :рубы 47 (фи|-. 4 и 6) последняя касается направляющегг) аппарата 31, ско,1ьзит мая или растягивая пружи падает в его УЗКУЮ часть
и в
нс.му и, сжи- и 44, по- фпг. 10), где рабочий элеугпграстся в дыпьто 2. мент 36 (фиг. 9).
Затем полая труба 47 и дьппло 21 начиняют поворачиваться вокруг Н1арпиров 43 и 20, растягивая пружины 44 и 23 (фиг. 5 и 71. Наличие парнпров 43 и 30 обеспечивает ( продольное 15ыра ;|;ивание полой ,)уСы 47 и дыпыа 2 для обеспечения -;и, /Лочков 4(S споим; ci-. г,:: пе- кромками ч нанр;:-1ля101 и .г нчзы 32. В лот момент (.)р j ходу погнфачн- вает тягач вправо, ум.ныная между дьпплим 21 и упором 25 {(i. 5), ув лекаеп ку.чамки 48 в напраь, пазы 32 захватного приспособления 30. 11. жру|.леп- ные П |.чмние кромки в двух поверхностях, кулачки 48, продвигаясь вдо.1ь направляю- 1ЦИХ пазов 32, своими передними гранями отжимают ({зиксаторы 3, ), а боковь 1ми гранями центри1П ют полую 48 и г(.)рнзон- тальной и вертикальной плоскостях в .чахват- ном фиспособлении 30 относигел1 но дып1- ла 21 и рабочего элемента 3G, Механическая стыковка (сцеп,1ение) тягача и скрепера 4 заверн1ается срабу гьп анием нру- жин 34 фиксаторов 33, Koi opi ie иск,1ючают обратный осевой ход ку;1ачков 48 ((fjnr. 11). Как в момент спепки, так и при сов.местной работе тягачей 1 и 2 со скрепером 4 , 1астич- ная муфта 46 (фиг. 13) ко.мпенснруег поперечные перекосы ман1ин за неровностей забоя и дороги.
Одновременно с этим к боковой поверхности полой трубы 47 пружинами 38 (фиг. 1 1) пост(инно прижимается кронштейн iio с рабочим элементом 36, заднн11 скос 42 (фиг. 14) которого при oceBoii фиксации кулачков 48 совмен1аегся с передним скосо.м 58 камеры 55, что обеснечивает предварительное центрирование розетки и вилки разъема 7 рабочего элемента 36 п камеры 55 (фнг. 12).
При торможении тягача 1 сцепное устройство 3 обесиечивает передачу усилия со скрепера 4 через дьинло 21, фиксаторы 33 захватного приспособления 30 на кулачки 48, полую трубу 47 и буксирную тягу 45 тягача 1. Тяговое усилие с тягача 1 ца скрепер 4 передается через букспрную тягу 45, юлую трубу 47, кулачки 48. захватное ири0 способление 30 па ,то 21. В обоих случаях камера 55 и рабочий элемепт 36 с вилкой п розеткой 7 полностью раз- г)ужены от действии усплий буксировки |ф иг. 8 и 9).
После мехапического соединения тягача I со скрепером 4 оператор на пу,1ьте 6 учр и.тения вк,пюч.1ет . iKiMaге.чь В2, пошет напряжение на :1,1ектромагнпт 12 (.4., фиг. 3 и 12). которьп |, преодолевая натяжение п)ужин 57 (фпг. 12 и 14), оеу0 П1естн, 1чет соединепне вилки и розетки разъема 7 тчгаЧо 1 скренсгьч 4. При соеди)1ении вилк:; г роз М ки ра п,ема 7 предусмотрено их окончательное центрирование с высокой точностью ча счет направлжС Н л.х ксшусон 40
5 с центрпрук)н;нми В1 ступамн 4 (фнг. 14 н 15) н,| BH, п розетке рая-ема 7, а также за счет чх разчимпения в речпювых но- душках 39 и 56. KJIOMC тот, Ho. iyniKM 39 н 5fi 1;р .: Д( (аья;сУ| разьем 7 от р аснен ;с:1ья
и 11О, 1О.: Ч ри ,ОЖНЬ Не:- Ч i I И ГС.Т ЬН Ь X
0 осевых и. 1 - нопия rtj.iio /.убы 7 в захвпт ч iiriHcnoco6 i .ин .40 нпп торможении н 1Н зезчом изменении k Kopoc i и шнже- ния тя1 ача 1 за счет зазоров между фиксаторами 33 и кулачками (фиг. II).
5 Однов|1емен О с с 1едине1Ч1ем ри1лкн м рг- зетки разъема 7 в работу вк.тючается промежуточное реле 13 (РГ|, которое 3aNM.iKa- ег свои нормально открытые контакты в це- 1П1 MaiHHTHoro пускатсмя .VM 11. под|отав.1иf. вая элект родвиг, 1те,пь 10 к мхску. ( оедине- нис контактов ви,1ки и ро.км ки раз ьема 7 происходит без наличия на них напряжения, так как оно подается на п(1.туразьемы ro. ib ко пос.те включе1П1я магнитного нхскатсля и нрп срабатывании нроме/куточною реле 13
5 (F l). Далсч оператор кнопкой «Пуск (КИП) с пульта 6 управленпя производит пуск электро.твига ге.тя 10 и пидает .начпк на перек,1ючате.ти ПК1, ПК2. ПКЗ, с помощью которых он в дальпейпк М Н1есгвляет управление зо.тотпиками 8 н исполнительными |-идропи.тиндр,1мн 18 через соленоиды С1- Сб. Таким образом, при работе скренерного arpei aia перемещение Hi- по.чнптельных гндроннлнндров нодъема ков- Hia, зас.юнкн п :uL Uiei i сгенкн cKptMiepa осу5 Н1естиляегся от автономной рогидрав- .лической систем1)1 15, устаиов.тенноГ на скре- нере 4. а пнтащ|е ее э, 1(. кт |)оэнергие11 и управление идет от генератира 5 и с пу,1ьта Г),
0
на тягаче
через провода
размешенных разъем 7.
Одновременно с подачей папряжения па переключатели I1K1, Г1К2, I1K3 подается 1П1тапие и па лектромагпит (фиг. 3), фиксатор вертикального niapnnpa 20 (фиг. 5), который перемеп1ает засов 28 в петлю 29 и блокирует шарпир 20, исключая его из работы во время трапспортного хода и ма- пеирировапия. Соосность засова 28 и петли 29 обеспечивается возможностью поворота тягача I вправо и дальпейп1его прямолинейного передвижения. При этом обе части дыпкта при па.тичии с(Л1)отивления пере- движепию скрепера вытягиваются по пря- Moii, пружипа 23 способствует этому.
После набора групта ковп скрепера 4 поднимают в грапспортпое положепие. перемешают из забоя на ровпую площадку около него и расцепляют с гусеничным тяга- чем I. ; 1ля спе |ления оператор тягача 1 па пульте 6 управления включает включатель В1 и подает пан|)яжение на электромагнит 11 (, фи1. 3, 13), обеспечивающий сжатие пружины 52, перемеп1ение ползуна 51 и клипа 50 вправо, освобождение ку- .lUMKoR 48, которые под действием возвратных пружин 49 утоплены в полой трубе 47, и механическое распепление тягача 1 и скрепера 4 (фиг. KV). Одновременно с этим напряжение подается па промежуточное реле 14 (Р2), которое своими нормаль}1о замкнутыми контактами обесточивает реле 13 (Р1) и электромагнит 12 (). В результате отключается магнитный пускатель МП1 обесточиваются розетка и вилка разъема 7, солепоиды С1- CG и пружины 57 их разъединяют. 1()сле освобождении кулачков 48 и перемеп епия полой трубы 47 относительно захватно1 о нриснособления 30 скос 58 камеры 55 скользит по заднему скосу 42 рабочего элемента 3() и ОТЕЮДИТ кронштейн 35, сжимая пружины 38 и окончательно осво- б1)ждан тя1ач 1 ((|)иг. 1,3).
Одновременно с обесточиванием .магнитного пускателя МП1 обесточивается и элек- тромашит 19 (Э/ЧЗ). При это за счет пру- 27 (фиг. 5) засов 28 выходит из петли 29, обеспечивая деблокирование шарнира 20 и его работу во время очередной стыковки скренера с колесным ил.1 гусеничным тягачами.
Для выполнения транспортных операций с минимальными затратами времени груженый скрепер 4 соединяют огшсанны.м способом с колесным тягачем 2 (фиг. 2) на ходу без его остановки. Поэтому колесный тягач 2, так же как и гусеничный, имеет сцепное устройство 3, генератор 5, пульт 6 управления и разъем 7 (фиг. 3).
Использование в скреперном агрегате Ko. iecfioro тяг ача 2 обеспечивает значительную экономию времени на транспортных онерациях (примерно в три раза) и существенно сокращает износ ходовой части гусе- НИЧН01-0 тягача 1, поскольку он перемещается в пределах забоя на низшей рабочей скорости. Кроме того, нри такой компоновке узлов гидросистемы экономятся рукава высокого давлепия, уменыпаются сопротивления и в самой гидравлической системе за счет приближепия насоса 16 к исполнительным механизмам.
Для выполпения операций по разгрузке ковша и планировке грунта в отвале оператсзр тягача 2 включает и выключает переключатели ПК1, ПК2, ПКЗ на пульте 6 управления, обеспечивая работу необходимых иснолнительных гидропилиндров 18 через золотники 8 с с(хпеноидг;ми 9.
После возвращения порожнего скреперного агрегата к забою на горизонтальной площадке оператор тягача 2 отцепляет по- рожпий скрепер 4 сцепным у .-тройством 3, его место занимает гусеничный тягач 1, а ко, 1есный тягач 2 транспортирует новый руженый скрепер 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сцепное устройство скреперного поезда | 1987 |
|
SU1418079A1 |
| Способ разработки забоя скреперным агрегатом и устройство для его осуществления | 1989 |
|
SU1758175A1 |
| ПРИЦЕПНОЕ УСТРОЙСТВО СКРЕПЕРА | 2002 |
|
RU2230158C1 |
| Устройство для сцепления и расцепления на ходу трактора с грузовой тележкой | 1978 |
|
SU854758A1 |
| Самоходный скрепер | 1989 |
|
SU1715997A1 |
| УСТРОЙСТВО для СОЕДИНЕНИЯ ТЯГАЧА С ПРИЦЕПОМ | 1973 |
|
SU382528A1 |
| Скреперный поезд | 1977 |
|
SU653349A1 |
| АВТОМАТИЧЕСКАЯ СЦЕПКА ДЛЯ ПРИСОЕДИНЕНИЯ ПРИЦЕПОВ К ПОЛЕВОЙ УБОРОЧНОЙ МАШИНЕ | 1991 |
|
RU2010477C1 |
| Сцепное устройство скреперного поезда | 1988 |
|
SU1609885A1 |
| Сцепное устройство полунавесных транспортных средств | 1990 |
|
SU1740230A1 |
78
/5
Фиг. 2
//ff / /
ФигЛ
24Фиг.5
21
7
Ш
Фиг.5
ВидА
Фиг. 1
27
°Ч
Фиг. 8
в ид Б
Фиг 9
8-е
37 33
43 49
V7
.73
Фиг 14
7 39
36
Фиг. 15
34
д 35 50 35 )6 35 7
39
36
| Авто)екое свидете | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
