Изобретение относится к мапгино- строению.
Целью изобретения является упрощение конструкции, повышение надежности и повьтение удобства эксплуатации.
На фиг.1 изображена схема включения устройства; на фиг,2 - кинематическая схема устройства.
Программное устройство для судовых лебедок содержит выходной вал 1, кинематически связанный с устройством 2 управления приводом 3 лебедки 4, гидроцилиндр 5 с подпружиненным поршнем, кулачки разгона - торможения при опускании (6) и при подъеме (7) груза, кулачок 8 остановки груза в предельном нижнем положении и кулачок 9 снижения скорости при подходе груза к предельному верхнему положению, кинематически связанные через рычажный толкатель 10 и предохранительное устройство tic вы- 1ходным валом 1.
Устройство снабжено двумя сельсинами-датчиками (не показаны), кинематически связанными с валом 12 лебедки 4 и электрически связанными с двумя сельсинами-приемниками 13 и 14 один из которых (14) кинематичес- ки связан с кулачком 8 остановки груза в предельном нижнем положении и кулачком 9 снижения скорости при .-.. подъеме груза к предельному верхнему положению, а другой сельсин-приемник кинематически связан с кулачками разгона - торможения при опускании (6) и при подъеме (7) груза, причем последние установлены на своих валах 15
и 16, связанных зубчато-реечной пере- 40 реечную передачу - кулачок 7 против
дачей 17, а между поршнем 18 гидроцилиндра 5 и рычажным толкателем 10 установлена пружина 19.
Устройство снабжено двумя дополнительными гидроцилиндрами 20 и 21 с подпружиненными поршнями 22 и 23, сопряженными в своем выдвинутом положении с торцами 24 рейки 25 зубчато- реечной передачи 17. На валу 15 установлен дополнительный кулачок 26, сопряже нный вместе с кулачком 6 с выключателями 27 и 28 соответственно. Поршни 18,22,23 поджаты другими пружинами 29-31 соответственно. На рычажном толкателе 10 жестко установле- 55сельсин-приемник 14 и начинает враны ролики 32 и 33, а также шарнирнощение в обратную сторону. Кулачок 6 связанная с ним тяга 34, которая че-вращается по часовой стрелке и через рез водило 35 и предохранительноеролик 33 выводит рычажный толкатель
устройство 11 связана также с выход- JHbiM валом 1. Сельсин-приемник 14 связан со своим сельсином-датчиком через реверсирующее устройство (не пока-
зано).
Программное устройство обозначено на фиг.1 позицией 36 и гидравлически связано с баком 37 своими гидрозле-iv ментами 38 через распределители 39,
40 и насос 41. Лебедка 4 связана с грузом 42. Между сельсином-приемником 14 и валом 15 установлена фрикционная муфта 43.
Программное устройство работает
следующим образом.
Для включения устройства 2 управ- ле ния ил опускание груза 42 включается распределитель 40, рабочая среда под давлением поступает от насоса
41 в правую полость тидроцилиндра 5 и в полость гидроцилиндра 21, поршни 18 и 23 перемещаются до упора, сжимают пружины 29 и 23 соответственно. Поршень 18 через пружину 19, перекладывая рычажный толкатель 10, прижимает ролик 33 к кулачку 6, поворачивая через тягу 34 водило 35, выходной вал 1.
Выходной вал 1, отклоняясь от нулевого положения, воздействует через устройство управления 2 на привод 3 и лебедка 4 вращается в сторону опускания груза 42. Начинает вращаться . сельсин-приемник 13. Происходит
опускание груза до воды и безударный вход его в воду с малой скоростью. После входа груза в воду включается сельсин-приемник 14 и вращает кулачки 6, 26 и через зубчаточасовой стрелки, при этом увеличиват ется отклонение выходного вала 1 от нулевого положения и скорость опус- кания груза увеличивается до максимальной по программе, определяемой профилем кулачка 6. При окончания разгона от кулачка 26 включается выключатель 27 и отключает сельсин- приемник 14, сельсин-приемник 13 в
это время продолжает вращагться. Происходит опускание груза с максимальной скоростью.
После подачи сигнала на прекращение опускания включается на реверс
fO
10 к нулевому положению, В это времй от кулачка 6 выключатель 28 выдает сигнал на выключение сельсина-приемника 14 и распределителя 40, рабочая жи;1кость из полостей гидроцилиндров 5 и 21 сливается в бак 37. Поршекь 18 под действием пружины 29 возвращает рычажный толкатель 10, а следовательно, и выходной вал 1 в нулевое Положение. Поршень 23 пружиной 3.1 возвращается в исходное положение. Происходит торможение и остановка груза при опускании.
Для.опускания груза из промежуточного положения включение сельсина- v 5 приемника 14 происходит сразу после подачи сигнала на опускание, в остальном устройство работает аналогично случаю опускания из верхнего положения.
В случае опускания груза до предельного нижнего положения програм- мное устройство работает аналогично описанным выше случаям. При подходе к предельному нижйему положению кулачок 8 входит в соприкосновение с роликом 32 и приводит выходной вал Т в нулевое положение независимо от того, был ли подан сигнал на прекращение опускания.
Для Подъема груза до промежуточ-г кого положения включается распределитель.
Работа программного устройства на
25
20
30
подъем аналогична работе при опуска- 35 Дельном нижнем положении и кулачок НИИ, только рабочая среда при этом поступает в левую полость трехпози- ционного гидроцилиндра 5 и в полость гидроцилиндра 20, а нижний ролик 33 рычажного толкателя 10 при разгоне 40 и торможении обкатывается - по профилю кулачка 7.
В случае подъема груза до верхнего положения программное устройство работает аналогично подъему до 45 промежуточного положения. При подходе груза к грузоподъемному устройству кулачок 9, разворачиваясь во время подъема, входит в соприкосновение с верхним роликом 33, повора- 50 чивает выходной вал 1 в сторону нулевого положения независимо от того, бьт ли подан сигнал на прекращение подъема. Скорость подъёма груза уменьшается по программе, определяе- jS мой профилем .кулачка 9, и обеспечивает безударную встречу груза с ipy- зоприемным устройством.
снижения скорости при подходе груза к предельному верхнему положению, кинематически связанные через рычажный толкатель и предохранительное устройство с выходным валом. Отличающееся тем, что, с целью упрощения конструкцииj повы шения йадежяости и удобства эксплуа тации, оно снабжено двумя сельсинами-датчиками, кинематически связан- HHMii с валом лебедки н электрически связанны1«н с двумя сельсинами-прием никами, один из которых кинематичес ки связан с кулачком остановки груза в предельном нижнем положении и кулачком снижехшя скорости при подъеме груза к предельному верхнем положению, а другой сельсин-приемни кинематически связан с кулачками ра гона - торможения при опускании и при подъеме Груза, причем последние установлены на своих валах, связанны зубчато-реечной передачей, а между
В случае внезапного отключения источников энергии программное устройство выводит выходной вал 1 в нулевое положение с помощью трехпо- зиционного гидроцилиндра 5, при этом поршень 18 возвращается пружи- ной 29 в исходное положение. Б это время кулачки 6 и 7 возвращаются в исходное положение с помощью рейки 25. На последнюю воздействует один из поршней 22 или 23, которые возвращаются в исходное положение пружинами соответственно 30 или 31, при этом фрикционная муфта 43 пробуксо- вьгеает.
Программное устройство позволяет управлять приводом лебедки при значительном его удалении от лебедки; упростить конструкцию за счет уменьшения количества гидрО1Щпиндров, кулачков, зубчато-реечных передач; повысить надежность работы.
25 Формулаизобретения
1. Программное устройство для судовых лебедок, содержащее выходной вал, кинематически связанный с устройством управления приводом лебедки, гидрощшйндр с подпружиненным поршнем, кулачки разгона - торможения при спускании и при подъеме груза, кулачок остановки груза в пре
Дельном нижнем положении и кулачок
снижения скорости при подходе груза к предельному верхнему положению, кинематически связанные через рычажный толкатель и предохранительное устройство с выходным валом. Отличающееся тем, что, с целью упрощения конструкцииj повышения йадежяости и удобства эксплуатации, оно снабжено двумя сельсинами-датчиками, кинематически связан- HHMii с валом лебедки н электрически связанны1«н с двумя сельсинами-приемниками, один из которых кинематически связан с кулачком остановки груза в предельном нижнем положении и кулачком снижехшя скорости при подъеме груза к предельному верхнему положению, а другой сельсин-приемник кинематически связан с кулачками разгона - торможения при опускании и при подъеме Груза, причем последние установлены на своих валах, связанны зубчато-реечной передачей, а между
5125Д4546
поршнем гидроцйлиндра и рычажным тол- жено двумя дополнительными гидроци- кателем установлена пружина.линдрами с подпружиненными поршнями,
сопряженными в своем выдвинутом по2. Устройство поп,1 отли- ложении с торцами рейки зубчато-рее4- ч а ю щ е е с я тем, что оно снаб- 5 ой передачи.
f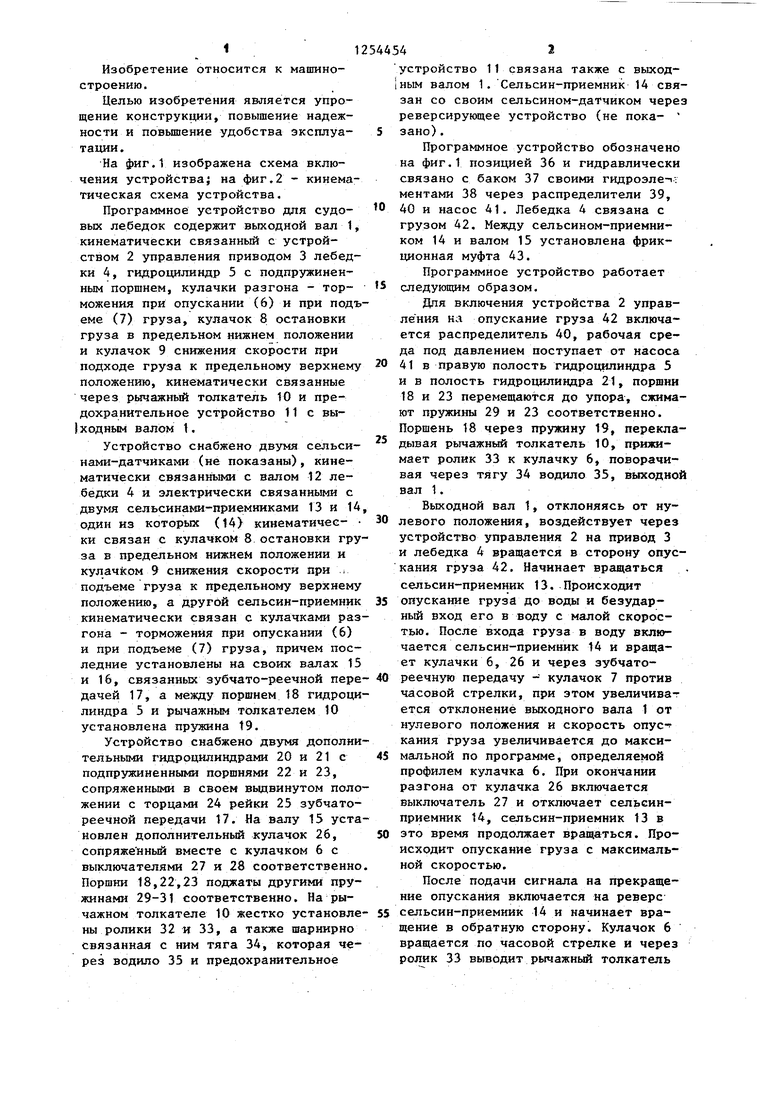

| название | год | авторы | номер документа |
|---|---|---|---|
| Программное устройство | 1976 |
|
SU713821A1 |
| Программное устройство для управления грузовой лебедкой | 1976 |
|
SU753840A1 |
| Программное устройство | 1988 |
|
SU1733370A1 |
| Механизм вертикального перемещения грузоподъемника крана-штабелера | 1989 |
|
SU1677020A1 |
| Кабельный кран | 1988 |
|
SU1558855A1 |
| БУРИЛЬНАЯ МАШИНА | 2000 |
|
RU2181827C2 |
| Тормозное устройство | 1984 |
|
SU1286859A1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| Система автоматического регулирования загрузки главной энергетической установки, шага регулируемого винта и скорости судна | 1987 |
|
SU1505844A1 |
| Автомат для насекания надфилей | 1986 |
|
SU1360922A1 |

Изобретение относится к области устройств управления. Цель изобретения - упрощение конструкции, повышение надежности и повывюние удобства эксплуатации. Программное устройство для судовых лебедок содержит выходной вал, гидроцилиндр с подпружиненным поршнем, кулачки разгона - торможения при опускании и при подъеме груза, кулачок остановки груза в предельном нижнем положении и кулачок снижения скорости при подходе груза к предельному верхнему положению, кинематически связанные через рычажный толкатель, и предохранительное устройство с выходным валом. Упрощение конструкции, повышение надежности и удобство зксплуатации достигается тем, что устройство снабжено двумя сельсинами-датчиками, кинематически связанными с валом лебедки и электрически связанными с двумя сельсинами-приемниками, кинематически связанными с кулачками. 1 з.п. ф-лы, 2 ил. (Л с ю СП и Сл 4
Составитель в.Муханов Редактор Н.Слободяник Техред И.Попович Кор ректор Е.Сирохман
Заказ 4719/51Тираж 836Подписное
ВНИЙПй Государствениого комитета СССР.
по делам изобретений и открытий 113035, Москва, Ж-ЗЗ Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Программное устройство для управления грузовой лебедкой | 1976 |
|
SU753840A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Программное устройство | 1976 |
|
SU713821A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
