«
Изобретение относится к магпино- строению, а более конкретно к схватам промышленных роботов.
Целью изобретения является расширение технологических возможностей схвата за счет обеспечения регулирования усилия захвата.
На чертеже изображен предлагаемый схват, общий вид.
Схват содержит корпус 1, в котором установлены с возможностью перемещения параллельно оси схвата шарниры 2, связанные с плоскими пружинами 3, на одном конце которых расположены губки 4 схвата, а другой связан с приводом перемещения пружин, включающим электромагнит 5, установленный в корпусе 1, с якорем 6, подпружиненным пружиной к корпусу 1, и зубчато-реечную передачу с рейкой 7, связанной с якорем 6, и двумя шестернями 8, установленными на корпусе 1 с возможностью поворота и связанными с концами пружин 3. Шарниры 2 снабжены механизмом их перемещения, включающим установленные на корпусе 1 с возможностью поворота две гайки 9 с зубчатой наружной поверхностью (венцом) два винта 10, ввинченные в гайки 9, и шестерню 11, установленную на корпусе 1 с возможностью поворота вокруг продольной оси схвата и взаимодействия с зубчатой поверхностью гаек 9. Концы винтов 10 связаны с шарнирами 2,
Схват промьш1ленного робота работает следующим образом.
В исходном состоянии (показано сплошной линией) изогнутые плоские пружины 3 перегибами обращены в сторону оси схвата и губки 4 сведены.
При подаче напряжения на электромагнит 5 якорь 6 втягивается внутрь электромагнита 5, преодолевая сопротивление пружины. Плоские пружины 3 скачкообразно переходят из одного устойчивого состояния в другое (перегибом от оси схвата, показано пунктирной линией), что приводит к перемещению губок 4 и их разведению.
ts
5 О55А28
Регулирование усилия захвата производится следующим образом.
При вращении одной из гаек 9 за счет зацепления ее с шестерней 11 начинает вращаться другая гайка 9, что приводит к синхронному перемещению винтов совместно с шарнирами 2. При перемещении их вверх радиус перегиба изогнутых плоских пружин 3 уменьшается, что в конечном итоге приводит к увеличению усилия захвата детали. Для уменьшения усилия захвата гайку 9 вращают в другую сторону, при этом винты опускаются вниз, а радиусы перегиба изогнутых плоских пружин 3 возрастают.
Формула изобретения
Схват промышленного робота, содержащий корпус, две губки, расположенные на одних концах ,плоских пружин, другие концы которых связаны с корпусом, шарниры, связывающие плоские пружины с корпусом, и привод перемещения губок, отличающ ийся тем, что, с целью расширения технологических возможностей схвата за счет обеспечения регулирования усилия захвата, он снабжен механизмом перемещения шарниров, включающим установленные на корпусе с возможностью поворота две гайки с зубчатыми венцами на их наружной поверхности, два винта, расположенные в гайках, и шестерню, установленную на корпусе с возможностью поворота вокруг продольной оси схвата и взаимодействия с зубчатыми венцами гаек,.при этом шарниры установлены в корпусе с возможностью перемещения параллельно оси схвата и связаны с концами винтов, а привод выполнен в виде установленного в корпусе электромагнита с якорем и зубчато-реечной передачи с двумя шестернями, расположенными по обе стороны от рейки, причем якорь электромагни- та подпружинен к корпусу и связан с рейкой, а шестерни передачи установлены на корпусе с возможностью поворота и связаны с другими концами пружин.
| название | год | авторы | номер документа |
|---|---|---|---|
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| СХВАТ МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2259915C1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Промышленный робот | 1987 |
|
SU1437216A1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| Схват манипулятора | 1983 |
|
SU1087327A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Схват манипулятора | 1983 |
|
SU1071421A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
Изобретение относится к машиностроению, а именно к схватам промышленных роботов. Целью изобретения является регулирование усилия захвата при повышении надежности удержания детали и расширение технологических возможностей схвата. Поставленная цель достигается тем, что схват снабжен устройством изменения кривизны изогнутых плоских пружин 3, выполненным в виде винтов 10, жестко связанных через шарниры 2 с плоскими пружинами 3, и гаек 9, на наружной поверхности которых нарезаны зубья, при этом гайки закреплены в корпусе на опорах и связаны между собой зацеплением посредством центральной шестерни 11, а привод схвата выполнен в виде электромагнита 5 с якорем 6, связанным с зубчато-реечной передачей, содержащей рейку 7 и две шестерни 8, установленные на опорах в корпусе 1 и связанные с одними концами изогнутых плоских пружин 3, на других концах которых установлены губки 4. 1 ил. W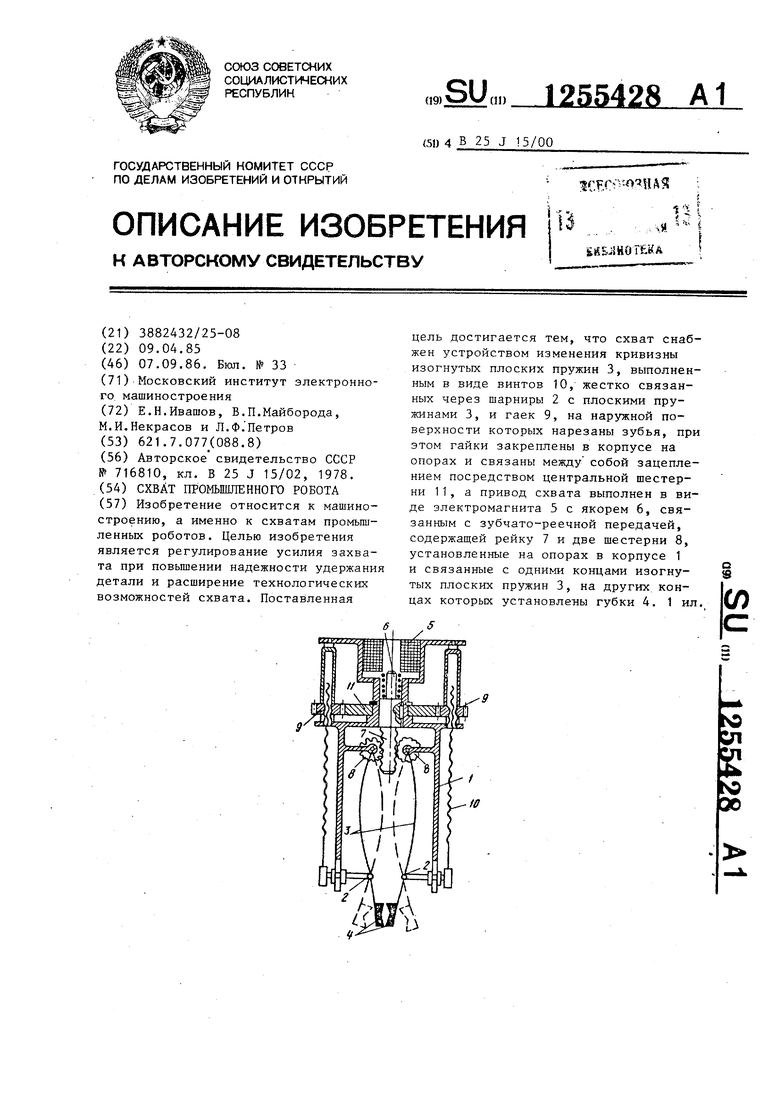
| Схват промышленного робота | 1978 |
|
SU716810A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
