Изобретение относится к электротехнике и автоматике и может быть использовано для дистанционной передачи угловых перемещений в следящих систе мах двустороннего действия с вентиль- ,ными электродвигателями н силомрмент- ным очувствлением.
Цель изобретения - повышение точности воспроизведения нагрузочных моментов на задающем валу,
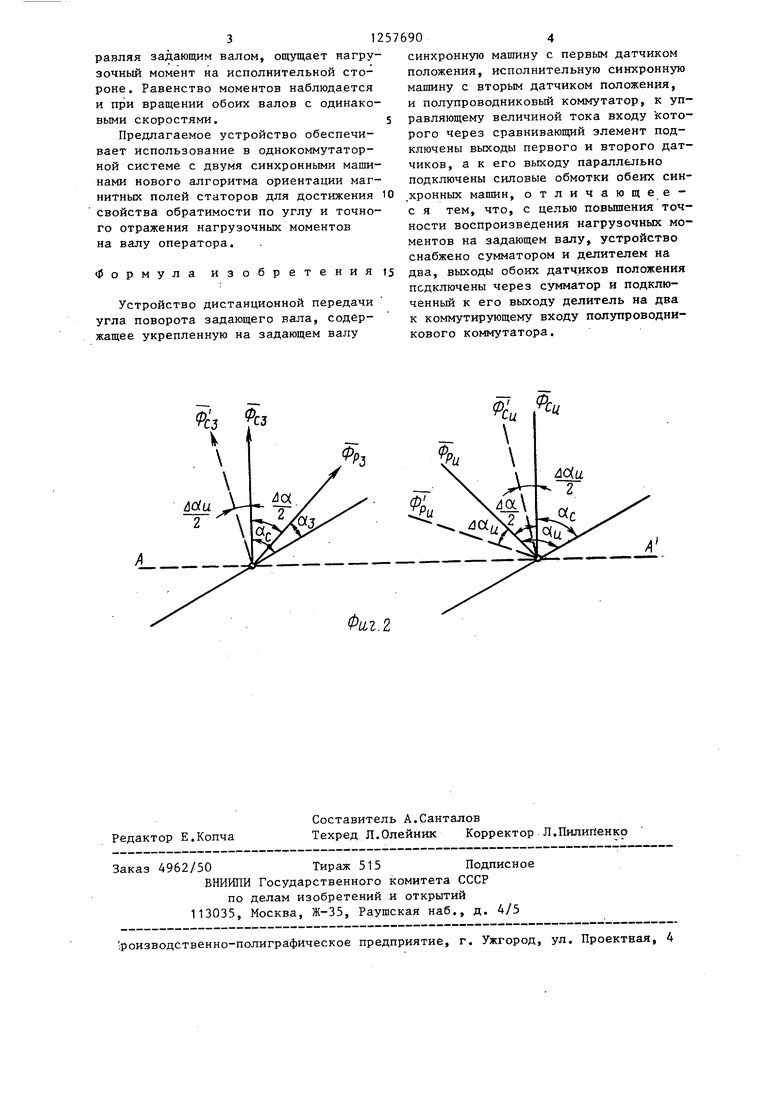
На фиг.1 изображена функциональная схема устройства; на фиг.2 - векторные диаграммы магнитных полей, поясняющие принцип его действия.
На чертежах и в тексте приняты следующие условные обозначения и сокращения: 0 J , ody , о;,; , Aoi - углы поворота задающего и исполнительного валов, их среднее арифметическое значение и разность соответственно; М,,, MM вращающие моменты на задающем и исполнительном валах; М , М - нагрузочные моменты на задающем и исполнительном валах, Ф , Фр, - потоки роторов синхронных машин на задающем и исполнительном валах , , Ф., - результирующие потоки статорных обмоток синхронных машин на задающем и исполнительном валах.
Устройство содержит соединенные с задающим и исполнительным валами синхронную машину 1 оператора, снабженную первым датчиком 2 положения ротора, сравнивающий элемент 3, второй датчик 4 положения ротора синхронной мащины 5 нагрузки, суммлтор 6 и делитель 7 на два, полупроводниковый ком- 1утатор 8 с управляющим и коммутирующим входами. К выходам коммутатора параллельно подключены соответствую- щие силовые обмотки статоров синхронных мащин 1 и 5. ,
Устройство работает следующим образом.
В режиме покоя валов (задающего и нагрузки) вследствие действия Мд и MK между валами имеет место некоторое рассогласование act, которое выявляется датчиками 2 и 4 положения и сравнивающим элементом 3. Это рассогласо- вание поступает на управляющий вход полупроводникового коммутатора 8, определяя, например, глубину широтно- импульсной позиционной модуляции напряжений на силовых обмотках синхрон- ных машин 1 и 5, т. е. величину потоков Фс и . Пространственная ориентация последних одинакова и определяется средним арифметическим значением углов поворота обоих валов «Сс благодаря наличию сумматора 6 и делителя 7 на два, подключаемого к коммутирующему, входу коммутатора, а также параллельному подключению силовых обмоток машин 1 и 5 к выходу полупроводникового коммутатора 8,. Указанное расположение магнитных потоков представлено на фиг.2, при этом для иллюстрации пространственных ориентации потоков считается, что оси роторов синхронных машин 1 и 5 расположены вдоль одной прямой АА , а направления Фс и Ф|., в пространстве совпадают. При этом вращающие моменты обеих синхронных мании выражаются следующими уравнениями:
Mi
М К, йоС Фр sin --;
Ли.
(1)
М Kjuot Фр,31п ---,
где К(, К - коэффициенты, зависящие от конструкции машин.
М, и М при идентичных машинах 1 и 5 равны при любых Доб, причем эта зависимость имеет место и при любых 5 и благодаря использованию сумматора 6 и делителя 7 на два. Это происходит вследствие того, то магнитные потоки роторов обеих машин отклонены от магнитных потоков их статоров на одинаковые углы, но в противоположных направлениях.
При изменении, например увеличении момента нагрузки на исполнительном валу на величину йМ., изменяются на некоторую величину углы л о; и о; , а магнитные потоки статоров обоих двигателей поворачиваются на угол
f -д. 0
--- (пунктирные векторы на фиг.2;.
Одновременно вследствие увеличения U od увеличиваются моменты М и М, как следует 13 формул (1). При этом коэффициент пропорциональности между ними остается неизменным вследствие того, что углы между потоками роторов и статоров обеих машин увеличиваются на одинаковую величину, а амплитуда потоков статоров пропорциональна вследствие параллельного подключения их обмоток к выходам коммутатора 8.
Таким образом, в устройстве имеет место принципиальное равенство моментов, развиваемых на исполнительном и задающем валах, т. е, оператор уп31
равляя задающим валом, ощущает нагрузочный момент на исполнительной стороне. Равенство моментов наблюдается и при вращении обоих валов с одинаковыми скоростями,
Предлагаемое устройство обеспечивает использование в однокоммутатор- ной системе с двумя синхронными машинами нового алгоритма ориентации магнитных полей статоров для достижения свойства обратимости по углу и точного отражения нагрузочных моментов на валу оператора.
«Формула изобретения 15
Устройство дистанционной передачи угла поворота задающего вала, содержащее укрепленную на задающем валу
синхронную машину с первым датчиком положения, исполнительную синхронную машину с вторым датчиком положения, и полупроводниковый коммутатор, к управляющему величиной тока входу которого через сравнивающий элемент подключены выходы первого и второго датчиков, а к его выходу параллельно подключены силовые обмотки обеих син- ,хронных машин, отличающее- с я тем, что, с целью повьшения точности воспроизведения нагрузочных моментов на задающем валу, устройство снабжено сумматором и делителем на два, выходы обоих датчиков положения подключены через сумматор и подключенный к его выходу делитель на два к коммутирующему входу полупроводникового коммутатора.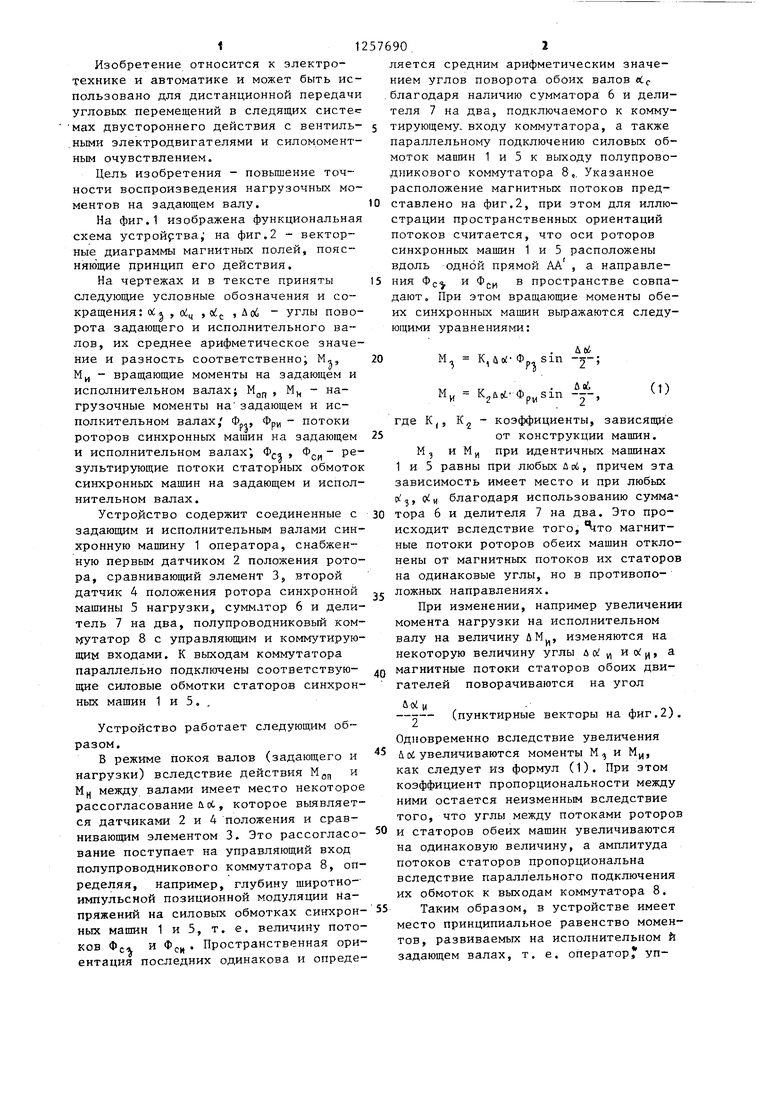
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угла с масштабированием усилий | 1985 |
|
SU1617550A1 |
| Устройство для дистанционной передачи угла поворота задающего вала с масштабированием усилий | 1985 |
|
SU1702494A1 |
| Устройство для дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1767636A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1690110A1 |
| Устройство для дистанционной передачи угла с масштабированием усилий | 1986 |
|
SU1817201A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1647789A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1984 |
|
SU1176425A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1619371A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1730712A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ УГЛА ПОВОРОТА ЗАДАЮЩЕГО ВАЛА | 1987 |
|
RU2072107C1 |
Изобретение относится к области электротехники и автоматики и может быть использовано для дистанционной передачи угловых перемещений в следящих системах двустороннего действия с вентильными электродвигателями и силомоментным очувствлением. Целью изобретения является повьшение точности воспроизведения нагрузочных моментов на задающем валу. Устройство содержит соединенную с задающим и исполнительным валами синхронную машину 1 оператора, снабженнзпо первым датчиком 2 положения ротора, сравнивающий элемент 3, второй датчик 4 положения ротора синхронной мащины 5 нагрузки, сумматор 6 и делитель 7 на два, полупроводниковый коммутатор (ПК) 8 с управляющим и коммутирукяцим входами. К управляющему величиной тока входу ПК через сравнивающий элемент 3 подключены выходы датчиков, а к выходу ПК параллельно подключены силовые обмотки обеих синхронных машин. К коммутирующему входу ПК через сумматор 6 и делитель 7 на два подключены выходы обоих датчиков 2 и 4. В данном устройстве достигается равенство моментов, развиваемых на исполнительном и задающем валах. 2 ил. (Л
. «
Фиг.2
Редактор Е,Копча
Составитель А,Санталов
Техред Л.Олейник Корректор Л,11илиг1енко
Заказ 4962/50Тираж 515 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д, 4/5
производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Аронов Я.И | |||
| Некоторые принципы построения безусилительных систем управления электромеханическими манипуляторами.- В кн.: Механика машин, вьш | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1984 |
|
SU1176425A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
