Фие /
Изобретение относится к электротехнике и может быть использовано для дистанционной передачи угловых перемещений в следящих системах двусторонне го действия с вентильными электродвигателями и силомоментным очувствлением.
Целью изобретения является повышение точности дистанционной передачи угла поворота вала.
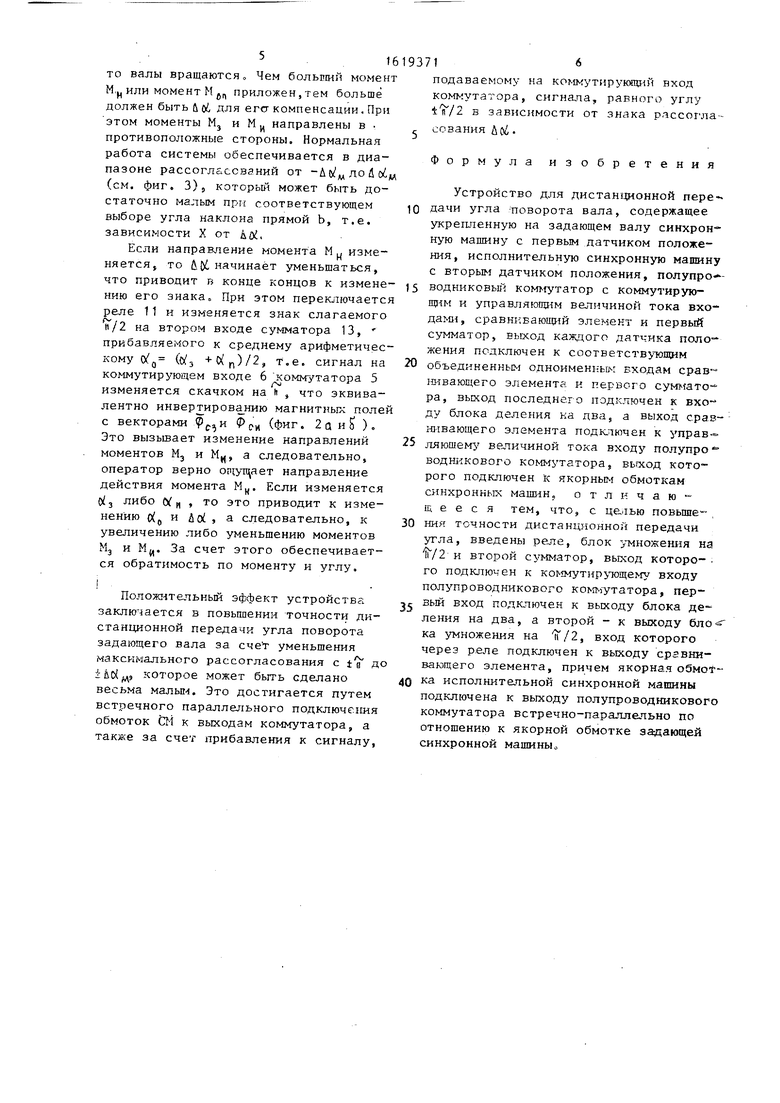
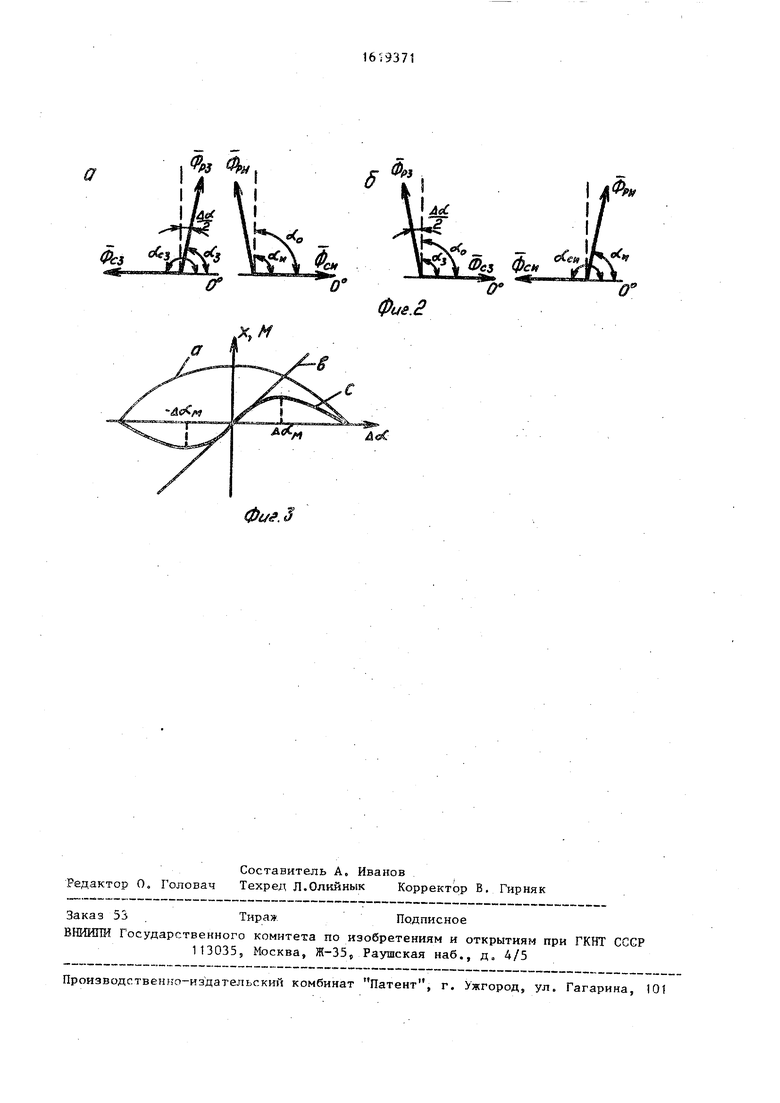
На фиг 1 изображена функциональная схема устройства дистанционной передачи угла поворота вала; на фиг, 2 - векторные диаграммы магнит- ных полей синхронных машин; на фиг 3 - моментные характеристики устройства,
На фиг. 1-3 приняты следующие условные обозначения: « , (Xn , A od углы поворота задающего и исполнительного валов (роторов) синхронных машин (СМ и рассогласование между ними соответственно; йД/м рассогласование валов, при котором вращающие моменты СМ мак- сималыш М, М - вращающие моменты задающей и исполнительной СМ; Моп, MH - нагрузочные моменты на задающЈм и исполнительном валах; Фец- векторы магнитных полей роторов и статоров задающей и исполнительной СМ.
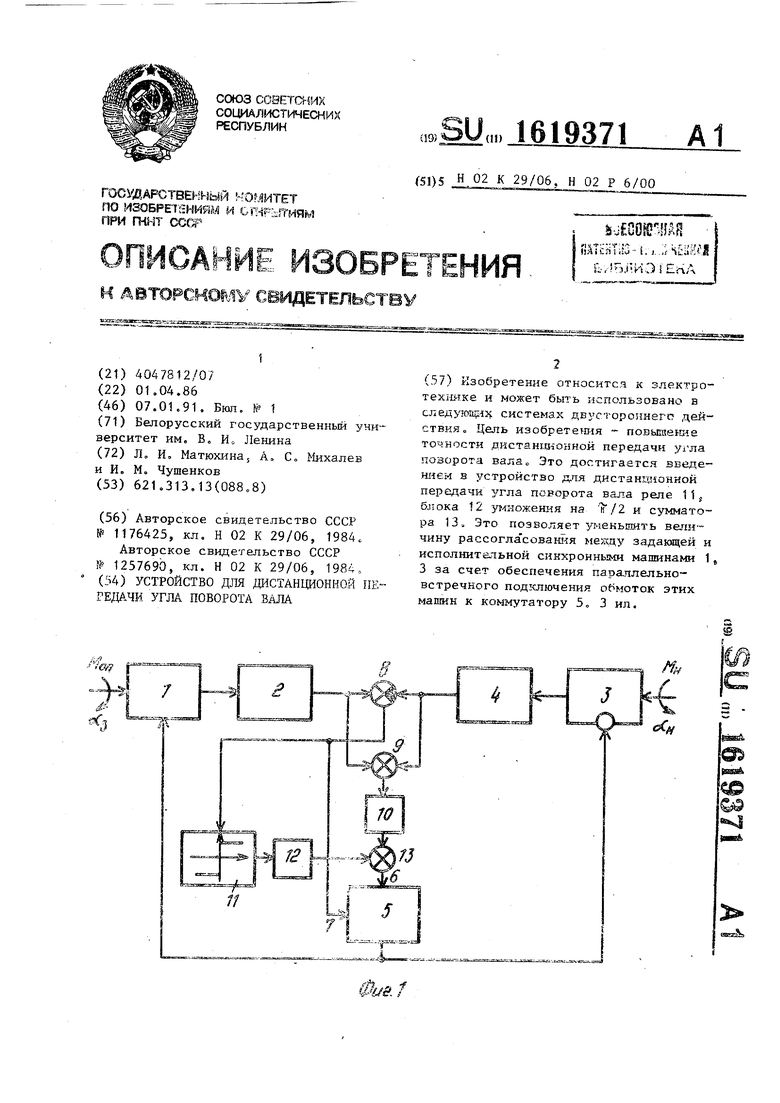
Устройство дистанционной передачи угла поворота содержит укрепленную на задающем валу синхронную машину 1 с первым датчиком 2 положения 8, испол- нительную синхронную машину 3 с вторым датчиком 4 положения5 полупроводниковый ко.даутатор 5 с коммутирующим 6 и управляющим величиной тока 7 входами, сравнивающий элемент 8 и первый сумматор 9S Выход каждого датчика 2, 4 подключен к соответствующим объединенным одноименным входам сравнивающего элемента 8 и первого сумматора 9, выход последнего подключен к входу блока 10 деления на два, а выход сравнивающего элемента 8 подключен к управляющему величиной тока входу 7 коммутатора 5, выход которого подключен К ЯКОРНЫМ обмОТКаМ СИНХРОННЫХ Ma-
шин 1 и 3. Кроме того, устройство дистанционной передачи угла поворота вала дополнительно содержит реле 1, блок 12 умножения на и/2 и второй сумматор 13, выход которого подключен к коммутирующему входу 6 полупроводникового коммутатора 5, первый вход сумматора 13 подключен к выходу блока 10 деления лл два, а второй вход сумматора 13 - к выходу блока 12 умг,( жс- ння на /2, вход которого чеьез репе 11 подключен к выходу сравнивающего элемента 8. Якорная обмотка исполнительной синхронной машины 3 подключена к выходу полупроводникового коммутатора 5 встречно-параллельно по отношению к якорной обмотке задающей синхронной машины 1.
Устройство дистанционной передачи угла поворота вала работает следующим образом.
Амплитуда магнитных полей статоров задается сигналом на входе коммутатора 5, управляющем величиной выходного тока, и пропорциональна рассогласованию валов Доб (фиг. 2), вычисляемому сравнивающим элементом 8. Положение статорных полей задается средним арифметическим углом поворота валов ы.й , к которому в сумматоре 13 прибавляется величина i IT/2 (в зависимости от знака Лоб). Таким образом, для моментов синхронных машин 1,3 можно записать (фиг. 2)
М, (К3 cos
uci
) Aoi
-II и (К м cos -5) Л,
(1)
где К„ - коэффициенты, определяемые конструкциями синхронных машин I и 3. Видно, что отношение М0 к М постоянно, хотя выражения (1) нелинейны. На фиг, 3 линия а показывает зависимость М (или Мй) от upi максимальной амплитуде Фс„(или Фс) линия b дает зависимость сигнала X на выходе сравнивающего элемента 89 а линия с показывает зависимость М, (или М) от oi для данного устройства.
Пусть в начальном состоянии АоЈ О тогда по (1) М3 . Если, например8 приложить к исполнительному валу момент Мм, то вектор начинает поворачиваться в сторону действия момента MH и появляется рассогласование Д а следовательно, и моменты М3 и М. Если оператор не прикладывает момент
М
on
Јх м
кй и
516
то валы вращаются Чем больший момент М н или момент М fin приложен,тем больше должен быть u oi для егсг компенсации. При этом моменты М3 и Ми направлены в противоположные стороны. Нормальная работа системы обеспечивается в диапазоне рассогласований от -Дс/м до и oijw (см. фиг. 3)э которьй может быть достаточно малым при соответствующем выборе угла наклона прямой Ь, т.е. зависимости X от &#,
Если направление момента М изменяется, то kfyi начинает уменьшаться, что приводит в конце концов к изменению его знака, При этом переключается реле 11 и изменяется знак слагаемого и/2 на втором входе сумматора 13, прибавляемого к среднему арифметическому (tf (с/з + 0(п)/2, т.е. сигнал на коммутирующем входе 6 коммутатора 5 изменяется скачком на , что эквивалентно инвертированию магнитных полей с векторами (фиг. 2 и и о )„ Это вызывает изменение направлений моментов М3 и Мц, а следовательно, оператор верно ощущает направление действия момента Мн. Если изменяется либо # и , то это приводит к изменению и Adi 9 а следовательно, к увеличению либо уменьшению моментов М3 и Мй. За счет этого обеспечивается обратимость по моменту и углу.
Положительный эффект устройства заключается в повышении точности дистанционной передачи угла поворота задающего вала за счет уменьшения максимального рассогласования с t e до ±UO(MJ которое может быть сделано весьма малым. Это достигается путем встречного параллельного подключения обмоток СМ к выходам коммутатора, а также за счет прибавления к сигналу,
371
подаваемому на коммутирующий вход коммутатора, сигнала, равного углу ilT/2 Б зависимости от знака рассогла- , ссвания uoi.
Формула изобретения
Устройство для дистанционной переЮ дачи угла поворота вала, содержащее укрепленную на задающем валу синхронную машину с первым датчиком положения, исполнительную синхронную машину с вторым датчиком положения, полупро- )5 водниковый коммутатор с коммутирующим и управляющим величиной тока входами, сравнивающий элемент и первый сумматор, выход каждого датчика положения подключен к соответствующим
20 объединенным одноименных входам сравнивающего элемента и первого суммато- - ра, выход последнего подключен к вхо-1 ду блока деления ка два, а выход сравнивающего элемента подключен к управ-
25 ляюшему величиной тока входу полупро воднккового коммутатора, вьгход которого подключен к якорным обмоткам
синхронных машин,
отличаю
щ е е с я тем, что, с целью повыше- ния точности дистанционной передачи угла, введены реле, блок умножения на fr/2 и второй сумматор, выход которо- . го подключен к коммутирующему входу полупроводникового коммутатора, пер- вый вход подключен к выходу блока деления на два, а второй - к выходу бло ка умножения на 1Г/2, вход которого через реле подключен к выходу сравнивающего элемента, причем якорная обмоТ- ка исполнительной синхронной машины подключена к выходу полупроводникового коммутатора встречно-параллельно по отношению к якорной обмотке задающей синхронной машинЫо
Фс
0е
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1647789A1 |
| Устройство для дистанционной передачи угла с масштабированием усилий | 1986 |
|
SU1817201A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1690110A1 |
| Устройство для дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1767636A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1767637A1 |
| Устройство для дистанционной передачи угла поворота задающего вала с масштабированием усилий | 1985 |
|
SU1702494A1 |
| Устройство для дистанционной передачи угла с масштабированием усилий | 1985 |
|
SU1617550A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1984 |
|
SU1257690A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1777207A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ УГЛА ПОВОРОТА ЗАДАЮЩЕГО ВАЛА | 1987 |
|
RU2072107C1 |
а
Фиг.З
| Устройство дистанционной передачи угла поворота задающего вала | 1984 |
|
SU1176425A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1984 |
|
SU1257690A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| счцнх системах двус ороннегг действия | |||
| Цель изобрететгия - повышение тоJнести дистанш-зоннои передачи чозорота вала,, Это достигается введе- н.чем в устройство для дистанционной передачи угла поворота вала реле 11s блока 12 умножения на к/2 к сумматора 13 Это позволяет уменьшить величину рассогласования между задающей и исполнительной синхронными машинами 1, 3 за счет обеспечения папаялельно- встречного подключения обмоток этих машин к коммутатору 5 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
