/3
Ј
ю «U
I
т
О j±
4 00 О
Изобретение относится к электротехнике может быть использовано в устройствах истанционной передачи угловых переещений и в следящих системах двутороннего действия с силомоментным чувствлением.
Целью изобретения является повышение точности дистанционной передачи угла поворота.
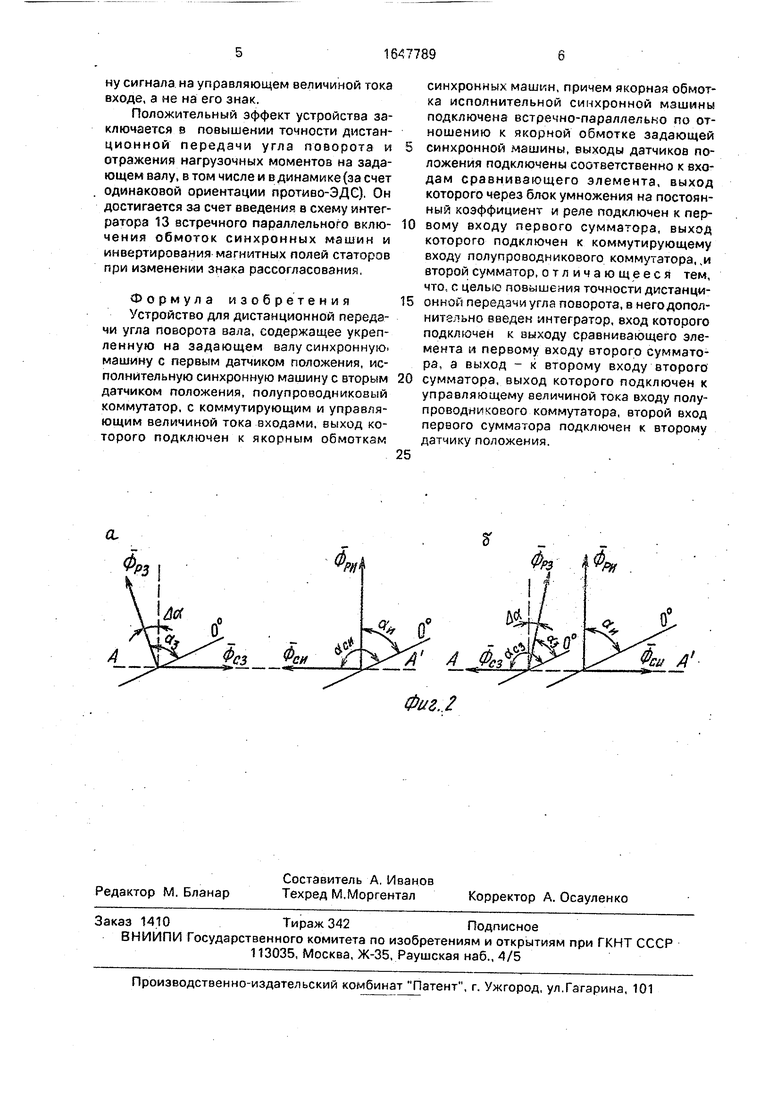
На фиг. 1 изображена функциональная схема устройства дистанционной передачи угла поворота вала; на фиг. 2 - векторные диаграммы магнитных полей, синхронных машин.
На фиг. 1 и 2 приняты следующие условные обозначения и сокращения:
аэ,аи,Да - углы поворота задающего и исполнительного валов и рассогласование между ними, соответственно;
Осз , Оси- углы поворота статорных полей синхронных машин;
М3, Ми - вращающие моменты синхронных машин;
Моп, Ми - нагрузочные моменты на задающем и исполнительном валах;
Фрз, Фри , Фсз , Фол - магнитные потоки роторов и статоров синхронных машин.
Устройство дистанционной передачи угла поворота вала содержит укрепленную нз задающем валу синхронную машину с первым датчиком 2 положения, исполнительную синхронную машину 3 с вторым датчиком 4 положения, полупроводниковый коммутатор 5 с коммутирующим 6 и управляющим 7 величиной тока входами, выход которого подключен к якорным обмоткам синхронных машин, причем якорная обмот- ка синхрокнай машины 3 подключена встречно-параллельно по отношению к якорной обмотке задающей синхронной машины 1, Выходы датчиков 2 и 4 положения подключены соответственно к входам сравнивающего элемента 8, выход которого через реле 9 и блок 10 умножения на постоянный коэффициент п подключен к первому входу первого сумматора 11, выход которого подключен к коммутирующему входу 6 коммутатора 5. Устройство содержит также второй сумматор 12 и интегратор 13, входы которых подключены к выходу сравнивающего элемента 8, а выход интегратора подключен к второму входу второго сумматора 12, выход которого подключен к управляющему величиной тока входу 7 коммутатора 5. Второй вход первого сумматора 11 подключен к выходу датчика 4 положения. Постоянный коэффициент блока 10 умножения равен л .
Устройство для дистанционной передачи угла поворота вала работает следующим образом.
В начальный момент времени рассогла- сование Да равно нулю и система находится в равновесии, т.е. , .
Такая ситуация возможна лишь в случае, если ,где К - коэффициент, равный отношению пусковых моментов 0 синхронных машин.
Для Мз и Ми можно записать
М3 K3cos Да(Да + Кин /Aadt);
о
5 М„ Ки (Да + Ки„ / Дa dt);
о
где Кз, Ки - коэффициенты, определяемые конструкциями синхронных машин;
Кин - коэффициент передачи интеграто- 0 ра 13.
При Да О моменты на валах определяются интегралом от рассогласования, при
ЭТОМ , .
лУгол (ФрГ, Фсз) тогда равен 90°, а угол
5 (Фри , Феи) всегда равен 90° (фиг.2). Если в какой-то момент времени М0п или Мн, например, возрастет, то появляется рассогласование Да, при этом М3 и Ми увеличивается. Кроме того, увеличивается сиг0 нал на выходе интегратора 13 до тех пор, пока увеличение вращающихся моментов не компенсирует наброс Моп или Мн и рассогласование Да не уменьшится до нуля. При этом магнитные поля роторов и стато5 ров синхронных машин 1 и 3 перпендикулярны.
При уменьшении в этой ситуации М0п или Мн Да сменяет знак, и сигнал на выходе интегратора 13 начинает уменьшаться.
0 Кроме того, в силу изменения знака Да и сохранения некоторое время в силу инерционности знака интеграла рассогласования запаздывание на выходе сумматора 12 существенно меньше, чем при включении
5 только одного интегратора 13. При изменении знака Да переключается и реле 9, что приводит к изменению сигнала на выходе блока 10 умножения таким образом, чтобы угол между Фсз и Фр3 был больше 90°.
0 При этом инвертируются направления Мэ и Ми(фиг,2б). В конечном итоге рассогласование Да уменьшается до нуля, т.е. система является астатической,
Инвертирование магнитных полей пу5 тем прибавления к сигналам датчика положения сигнала, пропорционального я, используется для упрощения полупроводникового коммутатора 5, который в данном случае должен реагировать лишь на величину сигнала на управляющем величиной тока входе, а не на его знак.
Положительный эффект устройства заключается в повышении точности дистанционной передачи угла поворота и отражения нагрузочных моментов на задающем валу, в том числе и в динамике (за счет одинаковой ориентации противо-ЭДС). Он достигается за счет введения в схему интегратора 13 встречного параллельного включения обмоток синхронных машин и инвертирования магнитных полей статоров при изменении знака рассогласования,
Формула изобретения Устройство для дистанционной передачи угла поворота вала, содержащее укрепленную на задающем валу синхронную. машину с первым датчиком положения, исполнительную синхронную машину с вторым датчиком положения, полупроводниковый коммутатор, с коммутирующим и управляющим величиной тока входами, выход которого подключен к якорным обмоткам
0
5
0
5
синхронных машин, причем якорная обмотка исполнительной синхронной машины подключена встречно-параллельно по отношению к якорной обмотке задающей синхронной .машины, выходы датчиков положения подключены соответственно к входам сравнивающего элемента, выход которого через блок умножения на постоянный коэффициент и реле подключен к первому входу первого сумматора, выход которого подключен к коммутирующему входу полупроводникового коммутатора, ,и второй сумматор, о т л и ч а ю щееся тем, что, с целью повышения точности дистанционной передачи угла поворота, в него дополнительно введен интегратор, вход которого подключен к выходу сравнивающего элемента и первому входу второго сумматора, а выход - к второму входу второго сумматора, выход которого подключен к управляющему величиной тока входу полупроводникового коммутатора, второй вход первого сумматора подключен к второму датчику положения.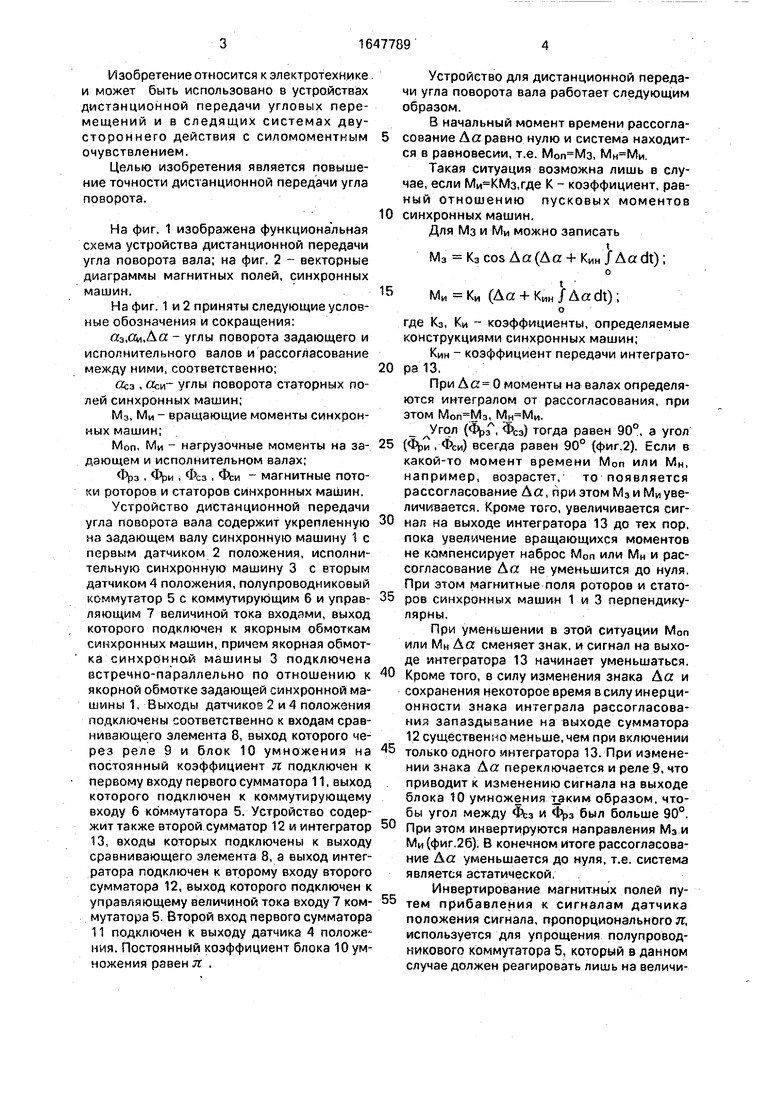
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1767637A1 |
| Устройство для дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1767636A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1690110A1 |
| Устройство для дистанционной передачи угла с масштабированием усилий | 1985 |
|
SU1617550A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1619371A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1730712A1 |
| Устройство для дистанционной передачи угла с масштабированием усилий | 1986 |
|
SU1817201A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ УГЛА ПОВОРОТА ЗАДАЮЩЕГО ВАЛА | 1987 |
|
RU2072107C1 |
| Устройство для дистанционной передачи угла поворота задающего вала с масштабированием усилий | 1985 |
|
SU1702494A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1777207A1 |
Изобретение относится к электротехнике и может быть использовано в следящих системах двухстороннего действия с силомоментным очувствлением. Целью изобретения является повышение точности дистанционной передачи угла поворота. Указанная цель достигается введением в устройство для дистанционной передачи угла поворота вала интегратора 13, подключенного к сравнивающему элементу 8, сумматору 12. Выход сумматора 12 соединен с управляющим величиной тока входом коммутатора 5. В результате обеспечиваются встречно-параллельное включение обмоток синхронных машин 1,3, инвертирование магнитных полей статоров синхронных машин 1,3 при изменении знака рассогласования углов поворота валов синхронных машин 7,3.2 ил. & (Л С
а.
ФРЗ
РИ
d 4. Jb%
%
i
Феи /I
Фиг. /
| Устройство дистанционной передачи угла поворота задающего вала | 1984 |
|
SU1176425A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1619371A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
