vj
о ю о
Изобретен относи гея к электротехнике и автоматике и может использовано для дистанционной пеоедгли перемещений Р следящих системах двустоо°н- него .L, о л с т ° 1 я с в и н i и л ь и ы м и электролита г: плми м- силомомннтным очувствлениеги г ри . еобхьду оои масшта- бирозания усилий
Цепь изобретения повышение КПД л расшире vie области пр, мене -,ия
На 4 и 1 представлена стоуктурнач схема авмого устрой тча; на фиг, 2 - аг . jphbif диаграммы а нитных полей, ,..ир его работу; нэ фиг 3 - момен н хг.Ч теристики устройства.
На фи, 1 3 приняты следующие огЧ о- начения- %., , «р 3 - углы поворота исполнительнее садрпщего валов (ро.оров синхронны машин), «с угон поворота магнитных полей v статоров; а - /гол между магнитными пэлями ротора и статора исполнительной синхронной машичы, М0р, Мн - нагрузочные моменты на задающем и ис- полнителаном валах; Mj, Ми - вррщающие моменты задзющей и исполнительной синхронных машин; Фрэ.Фри, Ф-з Феи - мэгнитныа потоки ротора и статора задающей и исп лнит льной синхронных машин
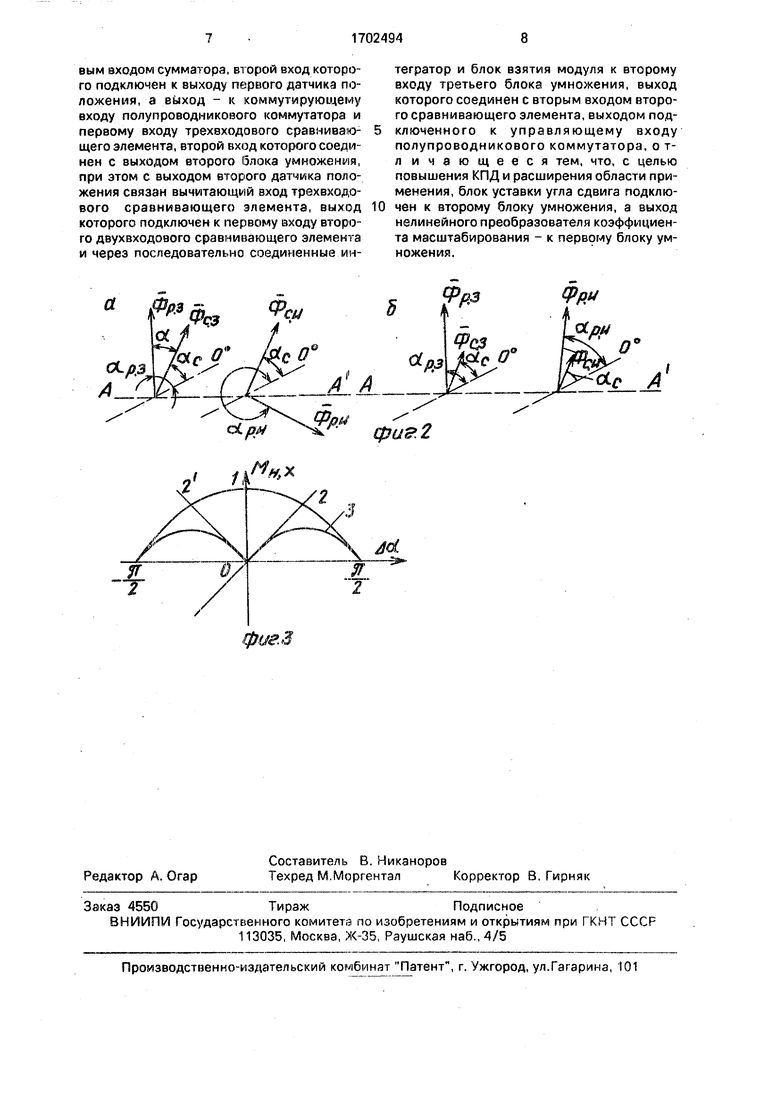
Устройство (фиг 1) содержит соединенные с зад юшим исполнительным валами задающую 1 и исполнительную 2 синхронные машину, снабжен ые датчиками положения 3 и , сдающего и исполнительного 3dnoe2 и 4, первый двухвходсвый сравнивающий элемрн j 5, сумматор 6, первый блек 7 умножения На - 1, реле 8, второй и третий блоки 9 и 10 умножения, нелинейный образогзтепь 11 вычисляющий угол а по заданному оi ношению
п М-,/Ми,(1)
интегратор 12 блок 13 модуля, треч- вчодовый 14 и второй двухвходовый 15 сравнивающие чпементы и полупроводниковый ксммутятор 16. Коммутирую-ций еход полупроводникового коммутатора 1R соеди нен с выходом сумматора 6, з вход, управляющий величиной выходного тока - с выходом второго двухвходовсто соавниваю- щего элемента 15
Устройство работает следующим образом
Угловая ориентация магнитных попей статоров обеих синхронных машин 1 и 2 t i еометрическом смысле одинакова, есл считать оси роторов расположенными вдоль одной прямой при совпадении начал отсче та датчиков 3 и 4 положения, одинаково ориентированных относительно роторов. За счет взаимодействия реле 8 и песэого
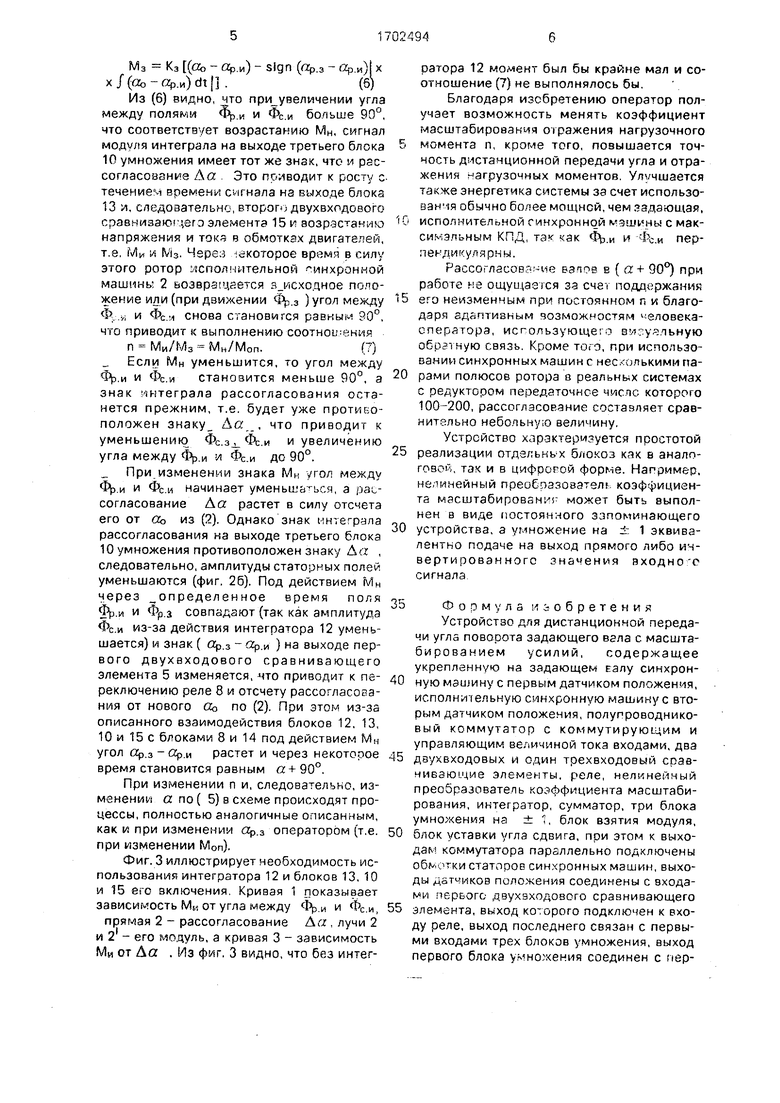
блока 7 умножения в сумматоре 6 к показаниям датчика 3 положения задающего вала г рибавляется сигнал в ± а , величина кото рого олределяет я сигналом с выхода нс-пинемного npeoGodjjea елл 1 . а знак определяется знаком сигнала с выхода пер- POI о двухвходово. о сравнивающего элемента 5 аким «браком, чтобы магнитные поля стат опь были откпс (вны на п. от магчит
Hjfc поля Фр з рогооа задающей синхронной MidiMHbi с троку Фр и (фиг 2а) При этом считоют ь начальный мимом у ол между Фр , t , и больше а Амплитуды глэт рчь х ni .ч- п.орцмональны в силу
таралле/1ьного ччгкчения оомоток синхрс HMLJX машин 1 л 2 и определяются рэ( согчс нмем f ,; о горое отсчитывается от ь де
срз +-( ь90°).(2)
о знзк t onpcrv пяется знаком сигнала с выхода ..ервсго двухв/эдового сравнивающего элемента 5 поступающего с выхода реле 8 на первый и второй блоки 7 и 9 умно- жения, т е. направлением нагрузочного момента Мн. в зависимости от которого ОР э будет больше ипи меньше Ор и .
При отключенном интеграторе 12 моменты г инхронных машин 1 и 2 выражаются следующим образом. Ми 1Чи («о - Ор и) i
М3- Kj( - «.Pn)slna,(3)
|де , К3 коэфрич 1енть1, определяемые KOhCiрукцией синхронных машин 1 и 2, при одинаковых двигателях Ки К3
Очевидно, что в рассматриваемой сие теме
п Ки/Кэ,(4)
и функциональный преобразователь 11 с учетом (1) и вычисляет а пи следующему закону.
Ки
« arcsin п К3
(5)
Рэссогпэсование Да ао-ари с вы- хода трехвходооо о сравнивающего элемента 1Д п (, ч(з на входы интегратора 12 и в срого л ухеходового сравнивающего элемента 1Ь При появлении некоторого рассогласования Ли появляются вращающие моменты в соответсгаии с уравнениями (3) и начинает увеличиваться модуль интеграла рассогласчтдания на выходе блока 13 При эг с у«етм работы интегратора 12, чгюко i , вз модуля и реле 8 выражения для «ащающих моментов мижнс записать Г1-едукн дим -боазом1
и - Ки (Оо - fЈ( u) - sign (rzD i - 2р и)| х х / (/ZQ - Пр й) 61J ,
М3 - Кт (fZo - rip и) - sign («р з - «р и)|х х/(«о -rcpM)dt| .(5)
Из (6) видно, что при увеличении угла между поляки Фр и и Фг и больше 90°, что соответстп/ет возрастанию Ми, сигнал интеграпа на выходе третьего блока 10 умножения имеет тот же знак что и рассогласована Это п вводит к (,осту с течение 1 онемей 1 с (гнзпа из блока 13 и ил м -иатрльнс PTOI or двухвходочого пае- изэю г;) элемента 15 г аозр зеванию напряж-,-НИР и токч и ( мл к ч двигатепей. те |ИИ л fvn Hep , ко орос вр.-м i в гилу этого ротор .смог дельной инхронной машина 2 ьозвра ЧС-Р г пленное попо- жеиие или (при дни/кенил ч 3 }угоп между I , и Фс 1 снова г,.ся эены 0°, 4io риводиг к выполнению соотмо --НИР
П-Ми/Мэ Mh/MonГ)
Если Мн уменьшится о угол между Фр и и Фс станозитсч меньше 90°, а знак .нтеграла рассогласования огтз- нется прежним, те бу/pr уже проти о положен знаку Л г/ , что приводит к уменьшению Ф-„ ,± Фс и и увеличению угла между Фр и и Фс и Дг- 0°
При изменении М. Фр и и Фс и начинает уменыг, -i a ;jri. согласование Да рэстет в cniv отсчета его от Оо из () Однако знак i н.е р па paccoi ласования на выходе третьего блок 10 умножения противоположен з -мк/ Д следовательно амплитудь, статог ых уменьшаются (фиг 26) Под действием Мн через определ ен ное tpeN R поля Фр и и Фр з СОВПЬАЗЮТ (так как амплитуда ФСи из за действия интегратора 12 умечь шается) и знак ( Ор 3 - г и ) на вы оде первого двухвходового гравнивэющего элемента 5 изменяется, то приводит к переключению реле 8 и отсчету рассо пасования от нового Оо по (2) При JTO из-за описанного взаимодействия блоков 12 13 10 и 15с блоками 8 и 14 РОД действием Мч угол Јр э - Ор и растет и через некотопое время становится равным с - 90°
При изменении п и следоэа елььс. из- м нении а. по ( 5) в схеме происходят процессы, полностью аналогичные о шсан ibiM как i при изменении dp 3 оператором (т е при изменении М0п)
Фиг 3 иллюстрирует чеоПходимогть ис- пользованиг инте ратора 12 и Ьлоков 13, 10 и 15 аключения Кривая 1 показывает зависимость Mk от угла 1} и и 1 и прямая 2 - рассогласование Л(х лучи 2 и 21 - его МОДУЛЬ а кривг я 3 зависимость Ми от Лот . Из фиг. 3 в/дно что боз интегратора 12 момент был бы крайне мал и соотношение (7) не выполнялось бы
Благодаря изобретению оператор получает возможность менять коэффициент масштабирования офажения нагрузочного
5 момента п кроме того, повышается точность дчстачционной передачи угла и отражения агрузочных моментов Улучшается также энергетика системы за счет использования обычно более мощней чем сдающая,
ь испо -мтепг.ной синхронной «. с мак- ги эпьным КГД та ак Фр и и и пер- ;1е(-/1Иг у яр -|Ы.
ласов г-ио с-зт1 в ( л + 90°) при работе с1 omymaeicfl за счв) поддержании
5 его неизменным при постоянном п и благодаря здоптивным чозмоАиостям вловека- сперлтора исгользукэще o i у пьную обратную г вязь Кроме ти.т, при использовании синхронных машин г нес- юькимипа0 рами полюсов ротора о реальных системах с редуктопом пе едаточнсе чист, которого 100 200, рассогласование с стачпяет срав- небопьну.о величину
Устройство характеризуется поостотой
5 реализации отдэ/;ьньх блочоз как в аналогов. точ и в цифрсгсй форме Например, не инейный преоСпатовэтел коэфуициен- т MPrujTa6npoBoH. s может быть выполнен в вице иостоян ного запоминающего
0 устройства а уг ножение на ± 1 эквивалентно подаче на выход прямого либо ин- вертиоовэнного значения входно о сигнала
5 Ф о м лай:-обретения
Устройстзо для дистанционной переда- и угла повооота задающего вала с масшта- бированием усилий, содержащее укрепленную на задающем ралу синхрон0 ную машину с первым датчиком положения, исполни i ельную синхронную машину с вторым датчиком положения,полупроводниковый коммутатор с коммутирующим и управляющим величиной тока входами, два
5 двухвходовых и один трехвходовый спаа- чивэю элементы, реле нелинеичый прес5рязпватель коэффициента масштабирования, интегратор, сумматор, три блока умножения н ± 1 блок взятия модутя,
0 блок уставки игла сдвига, пои этом к выходам коммутатора параллельно подключены o6v гки стат,юов син донных машин, выходы aT - i/KOci положения соединены с входами ipptofc двухзходовсго сравнивающего
5 ремонта, виход которого подключен к входу реле, выход последнего связан с первыми входами трех блоков умножения, выход первого блока умно кения соединен с первым входом сумматора, второй вход которого подключен к выходу первого датчика положения, а выход - к коммутирующему входу полупроводникового коммутатора и первому входу трехвходового сравнивающего элемента, второй вход которого соединен с выходом второго блока умножения, при этом с выходом второго датчика положения связан вычитающий вход трехвходового сравнивающего элемента, выход которого подключен к первому входу второго двухвходового сравнивающего элемента и через последовательно соединенные ин0
тегратор и блок взятия модуля к второму входу третьего блока умножения, выход которого соединен с вторым входом второго сравнивающего элемента, выходом подключенного к управляющему входу полупроводникового коммутатора, о т- л имеющееся тем, что, с целью повышения КПД и расширения области применения, блок уставки угла сдвига подключен к второму блоку умножения, а выход нелинейного преобразователя коэффициента масштабирования - к первому блоку умножения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угла с масштабированием усилий | 1985 |
|
SU1617550A1 |
| Устройство для дистанционной передачи угла с масштабированием усилий | 1986 |
|
SU1817201A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1777207A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1647789A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1619371A1 |
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1690110A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1984 |
|
SU1257690A1 |
| Устройство для дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1767636A1 |
Изобретение относится к элекфотехни- ке и автоматике Цель изобретения повышение КПД и расширение области применения устройства, Устройство содержит исполнительную (HMJ 2 и задающую (ЗМ) 1 синхронные машины. При работе ИМ 2 имеет перпендикулярные магнитные поля ротора (Р) и статора (С) ввиду наличия обратной связи по положению ИМ 2. В ЗМ 1, подключенной параллельно ИМ 2 к одному коммутатору, угол между магнитными полями ее Р и С задается путем преобразования по закону арксинуса имеющимся в устройстве нелинейным преобразователем, причем магнитные поля Р обеих машин отклонены в протиг ыоложные стороны от магнитных полей их С Введенный в схему интегратор 12 обеспечивает повышение точности, а вместе с соединенными по схеме реле 8. сумматором 6, сравнивающим элементом 5. блоком 13 взятия модуля и фемя блоками умножения на ± 1 обеспечивает работоспособность при изменении направлений моментов оператора и нагрузки и высокую динамическую точность 3 ил. (Л С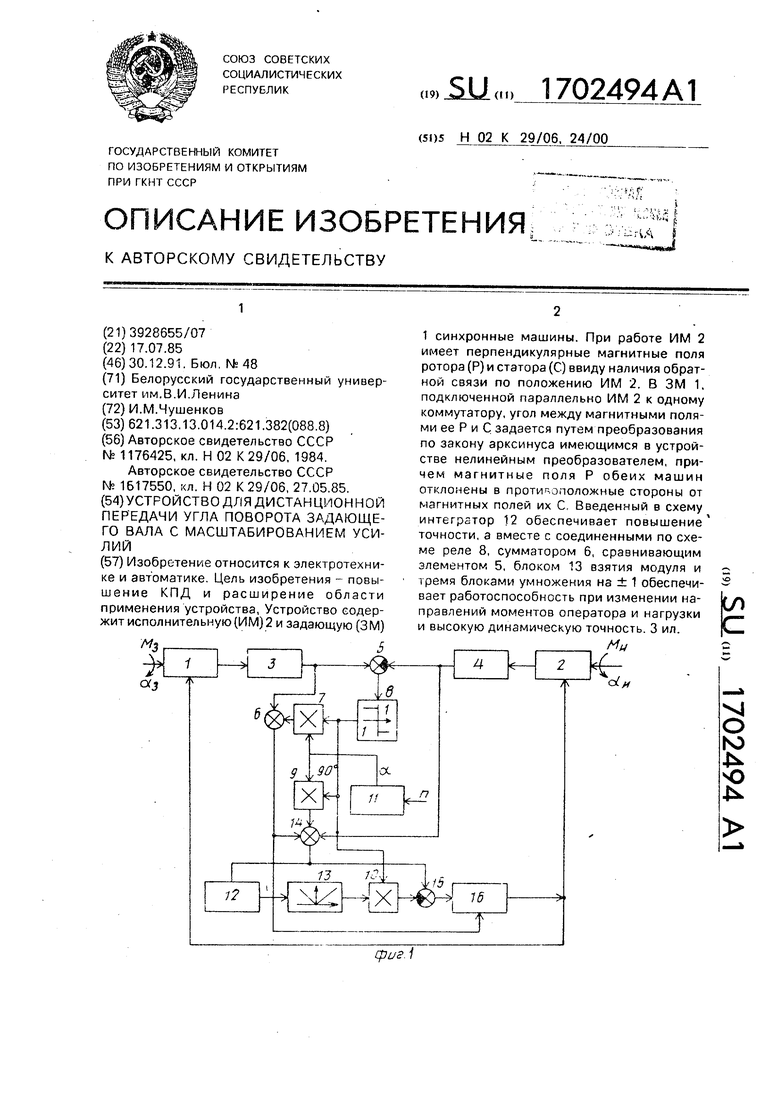
а № л
cLp« S%
м
, П
фигЗ
Ь 3
CL
Р
сз в
&о °
4d
| Устройство дистанционной передачи угла поворота задающего вала | 1984 |
|
SU1176425A1 |
