Изобретение относится к области электротехники и автоматики и может быть использовано для дистанционной передачи угловых перемещений в следящих системах двустороннего действия с вентильными электродвигателями и силомоментным очувствлением при необходимости масштабирования усилий
Цель изобретения - повышение точности передачи угла поворота задающего вала и отражения нагрузочных моментов.
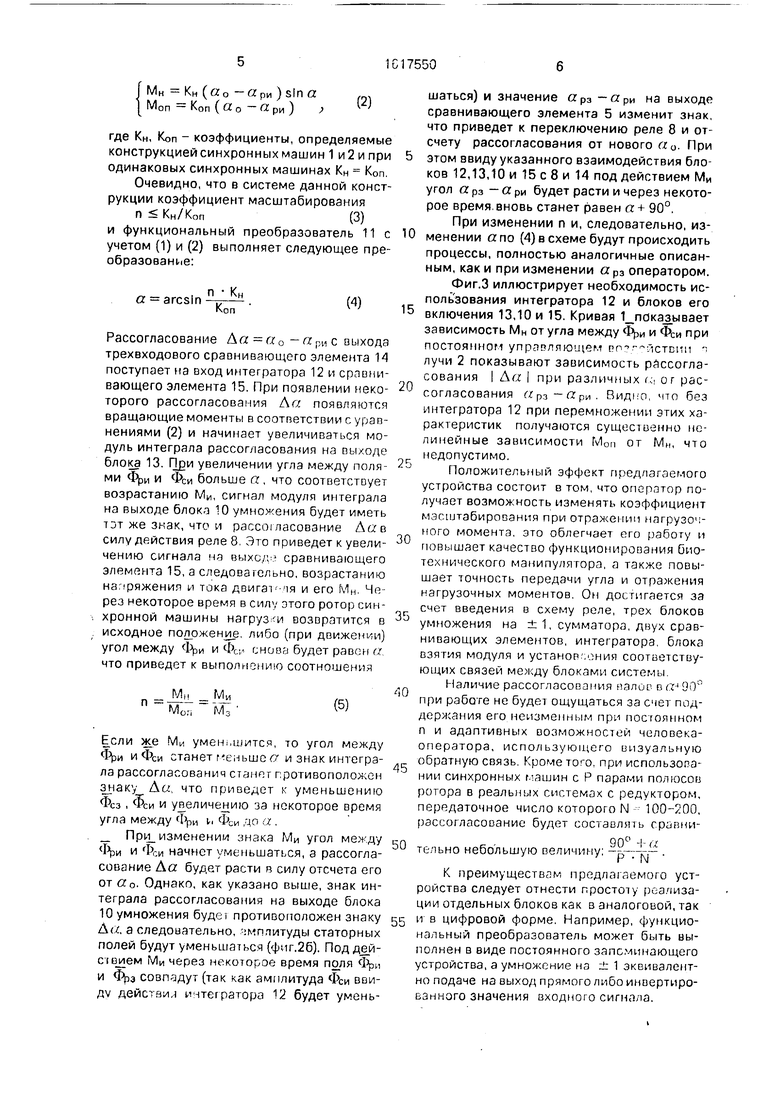
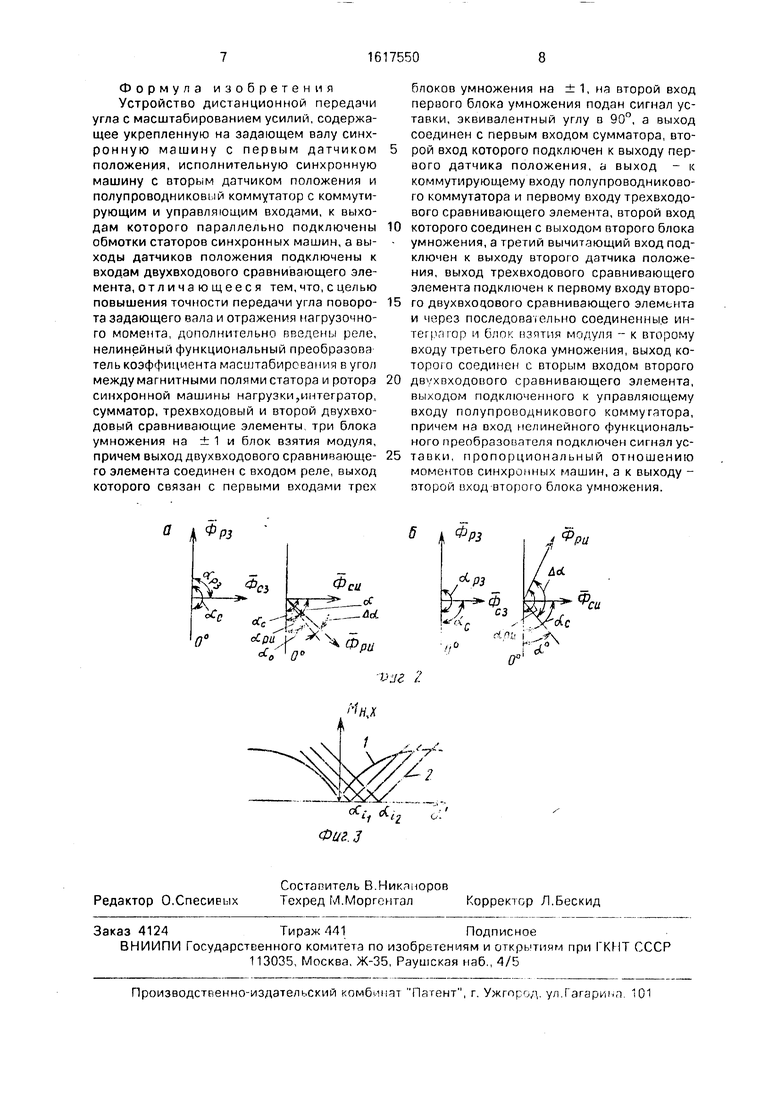
На фиг. 1 представлена структурная схема предлагаемого устройства; на фиг. 2 - векторные диаграммы магнитных полей, поясняющие его действие; на фиг. 3 - момент- ные характеристики устройства.
На фиг. 1-3 и в тексте приняты следующие условные обозначения:
сг ри , « рз - углы поворота соотЕзетствен- но исполнительного и задающего валов (роторов синхронных машин);
а с - угол поворота магнитных полей их статоров;
о.- угол между магнитными полями ротора и статора синхронной машины нагрузки {исполнительного двигателя);
Мэ, Ми - нагрузочные моменты на задающем и исполнительных валах;
Моп, Ми - MOh/ енты, развиваемые синх- poннJ,lми машинами ператора и нагрузки; , VH . Фсз , Феи - магнитные потоки роторов и статоров синхронных машин оператора и нагрузки.
Устройство содержит соединенные с задающим и исполнительными валами соответственно синхронные машины оператора 1 и нагрузки 2, снабженные датчиками положения вала: оператора 3 и нагрузки , сравнивающий элемент 5, сумматор 6. первый блок 7 умно: кения на ±1, реле 8. выделяющее знак рассогласования, второй 9 и третий 10 блок - умножения ма ±1, функциональный преобразователь 11, выч 1сляющий угол по заданному коэффициенту масштабирования, равному
п
(1)
интегратор 12, блок 13 взятия модуля, дополнительные сравнивающие :элементь ; трехвходовый Мидвухвходовый 15 и полупроводниковый коммутатор 16. Коммутирующий вход 17 полупроводникового коммутатора 16 соединен с выходом сумматора 6, а вход 18, управляющий величиной выходного тока, с выходом дополнительного двухвходо- вого сравнивающего элемента 15. На второй вход 19 первого блока 7 умножения
на ± 1 подается сигнал уставки, пропорциональный углу в 90°, а на вход 20 функционального преобразователя 11 - сигнал уставки, пропорциональный коэффициенту
5 масштабирования моментов.
Функцией реле 8 является инвертирование сигналов на выходах блоков 7,9 и 10 умножения, с входами которых соединен его выход. Посредством этого инвертирова10 ния осуществляется, во-первых, изменение направления моментов обеих синхронных машин 1 и 2 на противоположные при изменении направления нагрузочного момента Ми, чтобы последний правильно отражал15 ся на задающем валу в виде Моп; во-вторых, с помощью его и блока 9 умножения осуществляется смещение начала отсчета рассогласования а о для обеспечения работоспособности системы при изменении на20 правления Ми или заданного коэффициента масштабирования п. Реле 8 может быть любым, его входные и выходные уровни должны быть согласованы с блоками 7,9 и 10 умножения на ± 1, а также элементом 5.
25
Работа устройства осуществляется следующим образом.
Угловая ориентация магнитных полей статоров обеих синхронных машин 1 и 2
0 будет одинаковой если считать оси роторов расположенными вдоль одной прямой при совпадении начал отсчета датчиков 3 и 4 положения. За счет взаимодействия реле 8 и первого блока 7 умножения на ± 1 в сум5 маторе 6 к показаниям датчика 3 положения буд , I прибавлен сигнал в ± 90°, знак которого определяется сигналом с выхода реле 8 таким сбразо.м, чтобы магнитные поля статоров были отклонены на 90° от магнихного
О поля ротора задающего двигателя в сторону (фиг.2а). Амплитуды статорных полей пропорциональны в силу параллельного включения обмоток синхронных машин 1 и 2 и определяются рассогласованием Да, которое отсчитывается от положения
а о, я ао арз ±(а-Ь90°), где знак ± опроде/:яегся сигналом с выхода реле 8, поступающим на блоки 7 и 9 умножения на
0 исправлением нагрузочного момента Ми, в зависимости от которого Орз будет больше или меньше сгри . Угол а определяется необходимым оператору отношением моментов (I) - коэффициентом
5 мас штабирования и задает угол между Ф|зи и Фси(фиг.2а).
В принятых обозначениях при отключенном интеграторе 12 моменты двигателей выражаются следующим образом:
MH KH («о -«ри )slna Моп Коп («о -ари)
где Кн, Коп - коэффициенты, определяемые конструкцией синхронных машин 1 и2ипри одинаковых синхронных машинах Кн Коп. Очевидно, что в системе данной конструкции коэффициент масштабирования
П Кн/Коп(3)
и функциональный преобразователь 11 с учетом (1) и (2) выполняет следующее пре- образован11е:
а arcsin
п -Кн
(4)
Рассогласование Аа-«о -«рнс выхода трехвходового сравнивающего элемента 14 поступает на вход интегратора 12 и срасни- вающего элемента 15. При появлении некоторого рассогласования Ла появляются вращающие моменты в соответствии с уравнениями (2) и начинает увеличиваться модуль интеграла рассогласования на выходе блока 13. При увеличении угла между полями Фр и Феи больше а, что соответствует возрастанию Ми, сигнал модуля интеграла на выходе блока 10 умножения будет иметь тэт же знак, что и рассогласование Дав силу действия реле 8, Это приведет к увеличению сигнала на выхсд:з сравнивающего элемента 15, а следовагельно, возрастанию напряжения и тока двигат-ля и его Мн. Через некоторое время в силу этого ротор синхронной машины нагруЗ| и возвратится в исходное пoлpжeн Ie, либо (при движении) угол между ( и Фал снова будет равен а. что приведет к выполнению соотношения
Ми
Мз
(5)
Если же Ми умен,шится, то угол между Фри и Феи станет г/еньше (7 и знак интеграла рассогласования станет противоположен ,; Да, что приведет к уменьшению Фсз , Феи и у еличе2нию за некоторое время угла между , i,, до а . При изменении знака Ми угол меж.ду и Феи начнет уменьшаться, а рассогласование Да будет расти в силу отсчета его от ого. Однако, как указано выше, знак интеграла рассогласования на выходе блока 10 умножения будет противоположен знаку Аа, а следовательно, чмплитуды статорных полей будут уменьшаться (фиг.2б). Под Ми через некоторое время поля Фр и совпадут (так как амплитуда Феи ввиду дейстзи.т интегратора 12 будет умень
10
15
20
шаться) и значение «рз-ари на выходе
сравнивающего элемента 5 изменит знак, что приведет к переключению реле 8 и отсчету рассогласования от нового а о. При этом ввиду указанного взаимодействия блоков 12,13,10 и 15 с 8 и 14 под действием Ми угол «рз - огри будет расти и через некоторое время,вновь станет равен а + 90°,
При изменении п и, следовательно, изменении а по (4) в схеме будут происходить процессы, полностью аналогичные описанным, как и при изменении а рз оператором. Фиг.З иллюстрирует необходимость использования интегратора 12 и блоков его включения 13,10 и 15. Кривая 1 пйка ывает зависимость Мн от угла между Ф|эи и Фьи при nocTOPfiHOM управляющем пп-т -йстспи i лучи 2 показывают зависимость рйссогла- сования I Да | при различных с., от рассогласования арз-ари. Вид1:о, что без интегратора 12 при перемножении этих характеристик получаются существенно нелинейные зависимости Моп от Мн, что недопустимо.
Положительный эффект предлагаемого устройства состоит в том, что оператор получает возможность изменять коэффициент мас1итабиросанпя при отражении нагрузочного момента, это облегчает его работу и повышает качество функционирования биотехнического манипулятора, а также повышает точность передачи угла и отражения нагрузочных моментов. Он достигается за счет введения в схему реле, трех блоков умножения на ± 1, сумматора, двух сравнивающих элементов, интегратора, блока взятия модуля и установ, ;ония соответствующих связей между блоками системы.
Наличие рассогласования иалоо, в а при работе не будет ощущаться за счет поддержания его неизменным при постоянном п и адаптивных возможностей человека- оператора, использующего визуальную обратную связь. Кроме того, при использовании синхронных машин с Р парами полюсов ротора в реальных системах с редуктором, передаточное число которого N - 100-200, рассогласование будет составлять сравии50 тельно небольшую величину; .
К преимуществам предлагаемого устройства следует отнести простоту ез.пиза- ции отдельных блоков как в аналоговой, так 55 и в цифровой форме. Например, функциональный преобразователь может быть выполнен в виде постоянного запс.минающего устройства, а умножение на ± 1 эквивалентно подаче на выход прямого либо инвертированного значения входного сигнала.
25
30
35
45
Формула изобретения Устройство дистанционной передачи угла с масштабированием усилий, содержащее укрепленную на задающем валу синхронную машину с первым датчиком положения, исполнительную синхронную машину с вторым датчиком положения и полупроводниковый коммутатор с коммутирующим и управляющим входами, к выходам которого параллельно подключены обмотки статоров синхронных машин, а вы- ходы датчиков положения подключены к входам двухвходового сравнивающего элемента, отличающееся тем, что, с цел ью повышения точности передачи угла поворо- та задающего вала и отражения нагрузочного момента, дополнительно введены реле, нелинейный функциональный преобразопа тель коэффициента масштабирования в угол между магнитными полями статора и ротора синхронной машины нагрузки,интегратор, сумматор, трехвходовый и второй двухвхо- довмй сравнивающие элементы три блока умножения на ± 1 и блок взятия модуля, причем выход двухвходового сравнивающе- го элемента соединен с входом реле, выход которого связан с первыми входами трех
блоков умножения на ±1, на второй вход первого блока умножения подан сигнал уставки, эквивалентный углу в 90, а выход соединен с первым входом сумматора, второй вход которого подключен к выходу первого датчика положения, а выход - к коммутирующему входу полупроводникового коммутатора и первому входу трехвходо- вого сравнивающего элемента, второй вход которого соединен с выходом второго блока умножения, а третий вычитающий вход подключен к выходу второго датчика положения, выход трехвходового сравнивающего элемента подключен к первому входу второго двухвхоцового сравнивающего элемента и через последовательно соединенны.е ин- тегрлгор и блок пзятия модуля - к второму входу третьего блока умножения, выход которого соединен с вторым входом второго двухвходового сравнивающего элемента, выходом подключенного к управляющему входу полупроводникового коммутатора, причем на вход нелинейного функционального преобразователя подключен сигнал уставки, пропорциональный отношению моментов синхронных машин,а к выходу - аторой вход-второго блока умножения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угла с масштабированием усилий | 1986 |
|
SU1817201A1 |
| Устройство для дистанционной передачи угла поворота задающего вала с масштабированием усилий | 1985 |
|
SU1702494A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1777207A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1647789A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1690110A1 |
| Устройство для дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1767636A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1619371A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ УГЛА ПОВОРОТА ЗАДАЮЩЕГО ВАЛА | 1987 |
|
RU2072107C1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1767637A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
Изобретение относится к области электротехники и автоматики. Цель изобретения - повышение точности передачи угла поворота задающего вала и отражения нагрузочных моментов устройства дистанционной передачи угла с масштабированием усилий. Устройство содержит соединенные с задающим и исполнительными валами соответственно синхронные машины 1 и 2 оператора и нагрузки, снабженные датчиками 3 и 4 положения вала оператора и нагрузки, сравнивающий элемент 5, сумматор 6, первый блок 7 умножения на "±1", реле 8, выделяющее знак рассогласования, второй и третий блоки 9 и 10 умножения, функциональный преобразователь 11, вычисляющий угол α между магнитными полями ротора и статора. Введенные в схему интегратор 12 и блок 13 взятия модуля, дополнительные сравнивающие элементы трехходовый 14 и двухходовый 15 и полупроводниковый коммутатор 16 обеспечивают повышение точности и работоспособность при изменении направлений моментов оператора и нагрузки и высокую динамическую точность. Особенностью устройства является также изменение начала отсчета рассогласования в зависимости от коэффициента мощности. 3 ил.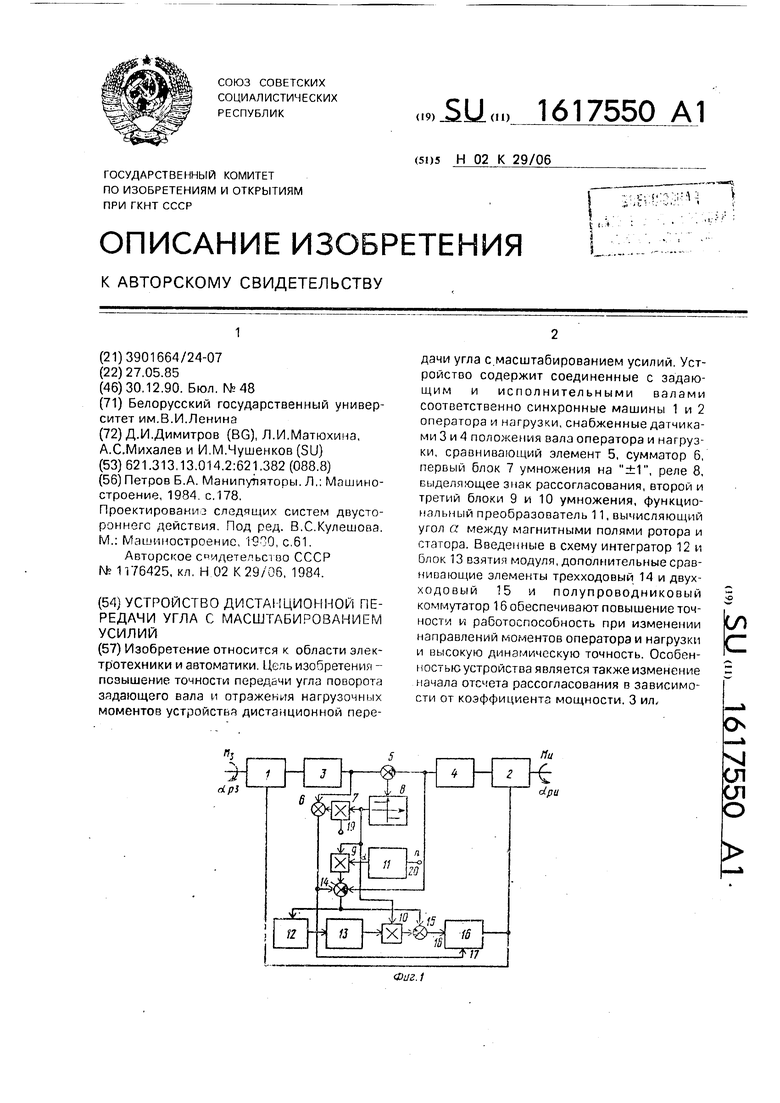
-А,
,,0К -о
1
2
| Петров Б.А | |||
| Манипуляторы | |||
| Л.; Машиностроение, 1984 | |||
| с | |||
| Способ получения кодеина | 1922 |
|
SU178A1 |
| Проектирование следящих систем двустороннего действия | |||
| Под ред | |||
| В.С.Кулешова | |||
| М.: Машиностроение, , с.61 | |||
| Устройство дистанционной передачи угла поворота задающего вала | 1984 |
|
SU1176425A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
