Os
О
о

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угла с масштабированием усилий | 1985 |
|
SU1617550A1 |
| Устройство для дистанционной передачи угла с масштабированием усилий | 1986 |
|
SU1817201A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1647789A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1777207A1 |
| Устройство для дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1767636A1 |
| Устройство для дистанционной передачи угла поворота задающего вала с масштабированием усилий | 1985 |
|
SU1702494A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1619371A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ УГЛА ПОВОРОТА ЗАДАЮЩЕГО ВАЛА | 1987 |
|
RU2072107C1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1730712A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1984 |
|
SU1257690A1 |
Изобретение относится к электротехнике и автоматике. Цель изобретения - повышение точности отражения нагрузочных моментов на задающем валу и дистанционной передачи угла поворота задающего вала, а также улучшения энергетических характеристик. Устройство содержит соединенные с задающим и исполнительным валами задающую 1 и исполнительную 2 син ронные машины с датчиками 3, 4 положения роторов соответственно.сравнивающий элемент 5, сумматор 6, блок 7 умножения на О и 1 и реле 8 инвертирования магнитных полей статоров при изменении знака рассогласования, Улучшение энергетических характеристик достигается благодаря использованию обратной связи по положению от датчика обычно более мощной исполнительной синхронной машины, вследствие чего она работает с максимальным КПД ввиду перпендикулярности магнитных полей ее ротора и статора. У задающей же синхронной машины 1 угол между магнитными полями ротора и статора зависит от момента нагрузки, а амплитуда статорных полей пропорциональна рассогласований валов. 7 ил. Ё
Изобретение относится к электротехнике и автоматике и может быть использовано в устройствах дистанционной передачи угловых перемещений в следящих системах двустороннего действия с силомоментным очувствлением.
Цель изобретения - повышение точности отражения нагрузочных моментов на задающем валу и дистанционной передачи угла поворота задающего вала, а также улучшение энергетических характеристик устройства.
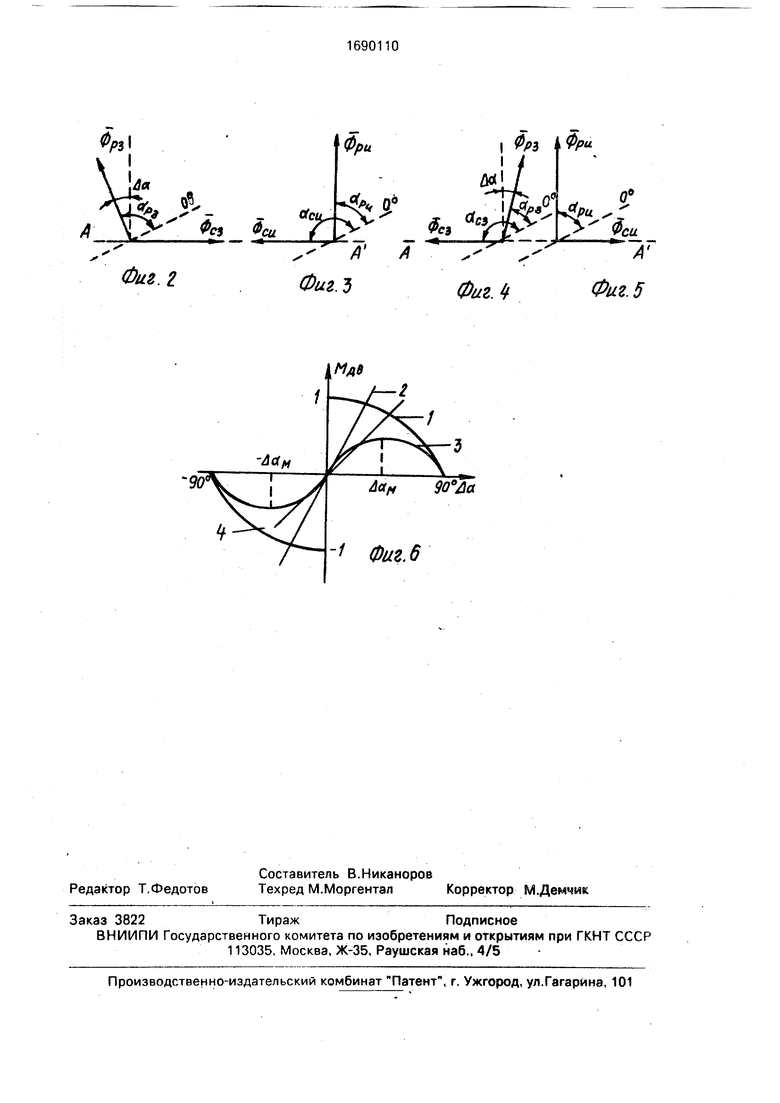
На фиг. 1 представлена функциональная схема устройства; на фиг. 2-5 показаны векторные диаграммы магнитных полей, поясняющие принцип его действия; на фиг. 6 - зависимость момента машины от угла рассогласования валов.
г
На чертежах и в тексте описания приняты следующие условные обозначения и сокращения:
«з .«и- Углы поворота задающего и исполнительного валов;
Асе- рассогласование валов;
о
угол между векторами магнитных потоков ротора и статора задающей синхронной машины;
Дом - рассогласование ваяов, при котором вращающий момент задающей синх- ронной машины максимзлен;
ФрЗ , Фри ФсЭ . Фал векторы магнитных потоков роторов и статоров задающей и исполнительной синхронной машин соответственно;
Моп, Мн - нагрузочные моменты на задающем и исполнительном валах, соответственно;
М3, Ми - вращающие моменты задающей и исполнитель-ной синхронных машин;
СМэ, СМц- задающая и исполнительная синхронные машины,
Устройство содержит соединенные с задающим и исполнительным валами задающую 1 и исполнительную 2 синхронные машины, снабженные датчиками положения роторов задающей 3 и исполнительной 4 синхронных машин (СМ), сравнивающий элемент 5, сумматор 6, блок 7 умножения на О и 1й, реле 8 и полупроводниковый ком- мутатор (ППК) 9. К выходам коммутатора 9 параллельно и встречно подключены соответствующие обмотки CMi и СМ2.
Устройство работает следующим образом.
В режиме покоя задающего и испольни- тельного валов под действием Моп и Мн имеет место некоторое рассогласование Асе (фиг. 2), которое выявляется сравнивающим элементом 5 по сигналам датчиков 3 и 4 положения. Это рассогласование поступает на управляющий величиной тоха вход полупроводникового коммутатора 9, задавая, например, глубину модуляции фазных напряжений в обмотках синхронных ма- шин 1 ., т.е. величины потоков статоров Фаз и Фы (фиг, 2). Взаимная ориентация магнитных потоков для упрощения показана при расположении осей обеих синхронных машин вдоль прямой АА и совпадении начал отсчета датчиков положения 3 и 4 (прямые О на фиг. 2). При этом Фь и Феи направлены встречно. Поток поля ротора исполнительной синхронной машины Фры всегда перпендикулярен Фен в си- лу использования обратной связи с выходом датчика 4 через сумматор 6, подключенной к коммутирующему входу ППК 9.
Между Фа и Фэи при этом оказывается
v
угол
I а
Вращающие моменты на валах обеих синхронных машин
Мз-КзДасозДа 7 Ми Ки Да j
(D
где К3, Ки - коэффициенты, определяемые конструкцией синхронных машин. Отношение моментов (в статике):
Кз cos Да
Ки
(2)
Из (2) видно, что отношение моментов практически постоянно (т.к. cos Да в некоторой области Да 0).
Нз фиг, 6 показана зависимость Мз от Да при изменении его от -90° до +90° (кривая 3). Кривая 1 показывает зависимость Мз от Да при максимальном напряжении на обмотках (косинусоидальная зависимость). Прямая 2 показывает зависимость сигнала х на выходе сравнивающего элемента 3 от Да . Рабочая область рассогласований Да в системе при этом органичена значениями Дом и Дом .Прямая 4 показывает зависимость Ми от Да.
Видно существование достаточно большой области значений Да, где п практически постоянно. В зависимости от мощности исполнительной синхронной машины наклон прямой 4 может меняться. С ростом крутизны прямой 2 точность отражения момента на задающем валу растет. Кроме того, максимальное рассогласование исполнительного и задающего валов не превышает Дом , что по сравнению с прототипом, где Да 90°, дает выигрыш а точности.
Если Мн в силу каких-либо причин возрастает, ротор приходит в даижение в сторону увеличения Да . При этом по (1) изменяются Мз и Ми (если арз const), Уетанавлиаается равновеснее новым Да. При уменьшении Мн вследствие аналогичных процессов уменьшается и Мз.
Блоки 6-8 служат для инвертирований магнитных потоков статоров двигателей за счет добавления к текущему сигналу датчика 4 положение сигнала, эквивалентного электрическому углу 180°. Это необходимо при изменении знака Ми для обеспечения симметричного отражения моментов, чего нет в прототипе. При изменении знака Мн Да уменьшается до О и меняет знак. При этом изменяется сигнал на выходе реле 8, и на втором входе сумматора 6 появляется сигнал 0° либо 180°, в зависимости от предыдущего знака Да , При этом потоки статоров ФсЗ иФЬи инвертируются, Мс и Ми неняют знак (см. фиг. 3 и 6), и в дальнейшем устройство работает описанным выше образом.
При изменении М0п (например, увеличении) увеличивается Да , что приводит к изменению Мс и Ми по (1) и, если Мн const, повороту ротора исполнительной синхрон- ной машины 2 и вместе с ним Фсз, Ф:и и уменьшению Ми и М3 и т.д , т.е. происходит дистанционная передача угла поворота.
Сумматор б может быть выполнен на операционйом усилителе, блоки 7 и 8 - на одном операционном усилителе с разомкнутой обратной связью, на выходе которого включены диод и делитель напряжения для формирования величины в 130°. При использовании цифровых датчиков положения ротора блоки 5 и 6 могут быть выполнены на комбинационных сумматорах, блок 7 - в виде логических схем И, первые входы которых соединяют с выходом реле 8, а на вторые подаются логические 0й и 1 для получения кода 180°,
Таким Образом, предлагаемое устройство обеспечивает повышение точности дистанционной передачи угла поворота задающего вала, повышение точности отражения нагрузочных моментов на задающем валу, а также улучшение энергетики системы за счет работы более мощной, обычно исполнительной, синхронной машины с наиболее высоким КПД (при перпендикулярности иФс ). Этот положительный эффект достигается за счет встречного параллельного включения обмоток синхронных машин 1 и 2, управления положением потоков их статоров отдатчика 4 положения исполнительной машины 2 и инвертирования магнитных полей их статоров при изменении знака рассогласования Да , для чего в схему введены последоватепьно соединенные реле 8, блок 7 умножения на 0 и 1 и сумматор 6, добавляющие з зависимо- сти от знака Да 0° либо 180° к сигналу второго датчика 4 положения.
Формула изобретения Устройство дистанционной передачи
угла поворота задающего вала, содержащее укрепленную на задающем валу синхронную машину с первым датчиком положения, исполнительную синхронную машину со вторым датчиком положения, полупроводниковый коммутатор, сравнивающий элемент, ко входам которого подключены выходы первого и второго датчиков положения, при этом обмотки синхронных машин включены параллельно и подсоединены к
выходу полупроводникового коммутатора, сумматор, реле и блок умножения, один из входов которого соединен с выходом реле, второй с блоком уставки угла, а выход - с одним из входов сумматора, выход которого
подключен к коммутирующему входу полупроводникового коммутатора, отличающееся тем, что, с целью повышения точности отражения нагрузочных моментов на задающем валу и дистанционной передачи угла поворота задающего зала при одновременном улучшении энергетических характеристик, второй вход сумматора подключен к выходу второго датчика положения, выход сравнивающего элемента - на
управляющий вход коммутатора, а обмотки синхронных машин соединены встречно.
cfo
с V /
%Ј v
А А
Фиг. 2
Фиг.Ъ
1 Фиг. 6
I РЗ ЬФР«
Фиг.Ь
Фиг. 5
| Аронов Я.И | |||
| Некоторые принципы построения безусилительных систем управленияэлектромеханическими манипуляторами | |||
| В кн.: Механика машин, М.: Наука, 1969, вып | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Андреенко С.М., Ворошилов М.С., Петров Б.А | |||
| Проектирование приводов манипуляторов, Л.: Машиностроение, 1975 | |||
| Устройство для дистанционной передачи угла с масштабированием усилий | 1985 |
|
SU1617550A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
