1
(21)4012751/24-07 (22)26.11.85 (46)07.10.92. Бюл. Мг 37
(71)Белорусский государственный университет им. В.И.Ленина
(72)И.М.Чушенков
(56)1. Петров Б.А. Манипуляторы-Л..Машиностроение, 1984, с. 139.
2. Проектирование следящих систем двустороннего действия. Подряд В.С.Кулешова - М., Машиностроение, 1980, с. 141.
3. Авторское свидетельство СССР № 1176425, Н 02 К 29/06, 1984. (54) УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ УГЛА ПОВОРОТА ЗАДАЮЩЕГО ВАЛА
(57)Изобретение относится к электротехнике и может быть использовано в следящих системах двустороннего действия. Целью изобретения является повышение точности
отражения нагрузочных моментов. Указанная цель достигается введением сумматоров 8, интегратора 9 и двух датчиков 10, 11 момента, Датчики 10, 11 установлены соответственно на задающем и исполнительном валах. Выход датчика 10 подключен к одному входу сравнивающего элемента 7, к другому входу которого подключен выход датчика 11. Выход сравнивающего элемента 7 соединен с первым входом сумматора 8 и выходом интегратора 9. Выход интегратора 9 подключен к второму входу сумматора 8, выход которого подключен к управляющему .входу полупроводникового коммутатора (ПК) 4. Коммутирующий вход ПК 4 связан с датчиком 3 положения, а с силовыми входами ПК 4 - обмотки статоров синхронных машин 1, 2. В устройстве обеспечиваются обратимость по моменту и его знаку и дистанционная передача угла поворота. 2 ил.
СЛ С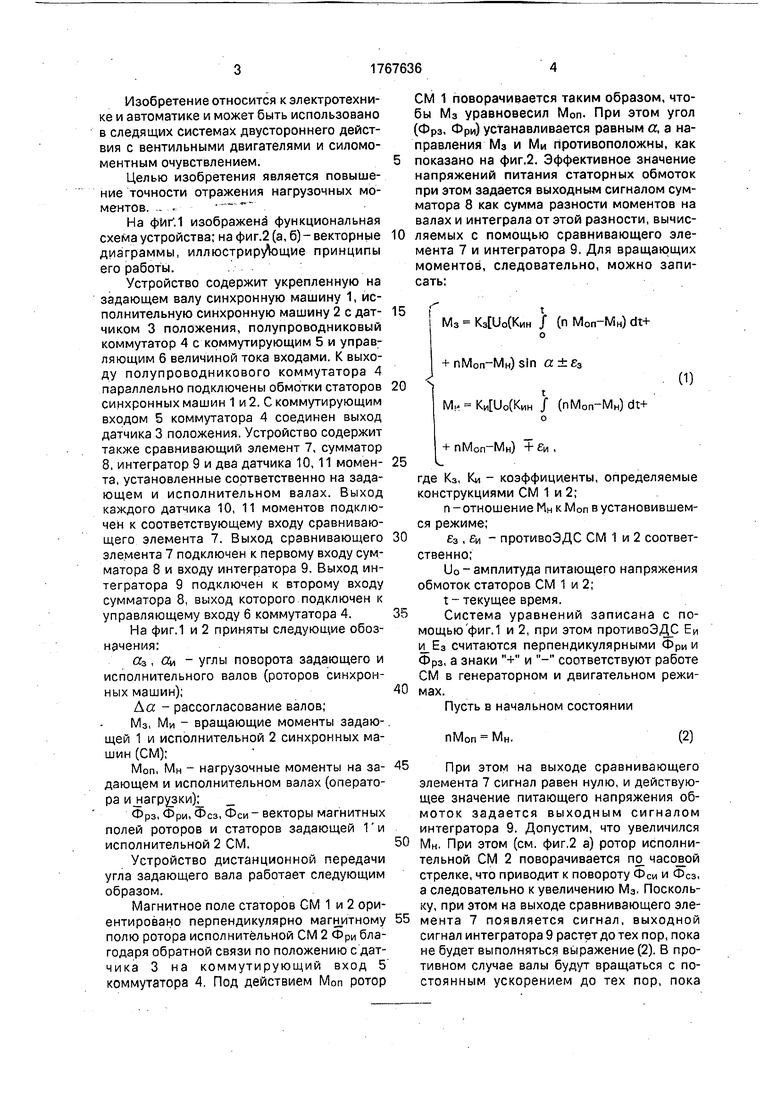
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1647789A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1767637A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1690110A1 |
| Устройство для дистанционной передачи угла с масштабированием усилий | 1986 |
|
SU1817201A1 |
| Устройство для дистанционной передачи угла с масштабированием усилий | 1985 |
|
SU1617550A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1730712A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ УГЛА ПОВОРОТА ЗАДАЮЩЕГО ВАЛА | 1987 |
|
RU2072107C1 |
| Устройство для дистанционной передачи угла поворота задающего вала с масштабированием усилий | 1985 |
|
SU1702494A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1777207A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1619371A1 |
М0п
М
10 х
м
к
Я
ч.
ч о VJ
о со о
Изобретение относится к электротехнике и автоматике и может быть использовано в следящих системах двустороннего действия с вентильными двигателями и силомо- ментным очувствлением.
Целью изобретения является повышение точности отражения нагрузочных моментов. . .-
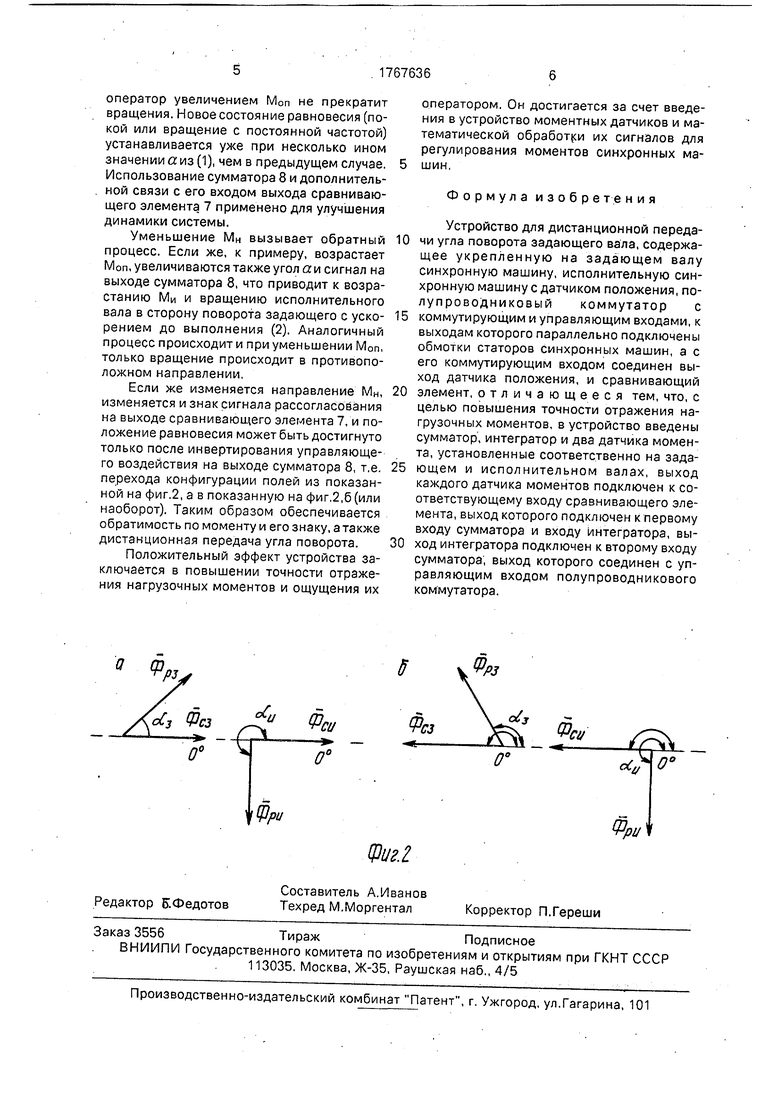
На фиг1. изображена функциональная схема устройства; на фиг.2 (а, б) -векторные диаграммы, иллюстрируЪщие принципы его работы.
Устройство содержит укрепленную на задающем валу синхронную машину 1, исполнительную синхронную машину 2 с дат- чиком 3 положения, полупроводниковый коммутатор 4 с коммутирующим 5 и управляющим 6 величиной тока входами. К выходу полупроводникового коммутатора 4 параллельно подключены обмотки статоров синхронных машин 1 и 2. С коммутирующим входом 5 коммутатора 4 соединен выход датчика 3 положения. Устройство содержит также сравнивающий элемент 7, сумматор 8, интегратор 9 и два датчика 10,11 момен- та, установленные соответственно на задающем и исполнительном валах. Выход каждого датчика 10, 11 моментов подключен к соответствующему входу сравнивающего элемента 7. Выход сравнивающего элемента 7 подключен к первому входу сумматора 8 и входу интегратора 9. Выход интегратора 9 подключен к второму входу сумматора 8, выход которого подключен к управляющему входу 6 коммутатора 4.
На фиг,1 и 2 приняты следующие обозначения:
%, «и - углы поворота задающего и исполнительного валов (роторов синхронных машин);
Да - рассогласование валов;
М3, Ми - вращающие моменты задающей 1 и исполнительной 2 синхронных машин (СМ);
Моп, Мн - нагрузочные моменты на за- дающем и исполнительном валах (оператора )
Фрз, Фри, Фсз, Феи - векторы магнитных полей роторов и статоров задающей 1 и исполнительной 2 СМ.
Устройство дистанционной передачи угла задающего вала работает следующим образом.
Магнитное поле статоров СМ 1 и 2 ориентировано перпендикулярно магнитному полю ротора исполнительной СМ 2 Фри благодаря обратной связи по положению с дат- чика 3 на коммутирующий вход 5 коммутатора 4. Под действием Моп ротор
СМ 1 поворачивается таким образом, чтобы Мз уравновесил М0п. При этом угол (Фрз, Фри) устанавливается равным а, а направления М3 и Ми противоположны, как показано на фиг.2. Эффективное значение напряжений питания статорных обмоток при этом задается выходным сигналом сумматора 8 как сумма разности моментов на валах и интеграла от этой разности, вычисляемых с помощью сравнивающего элемента 7 и интегратора 9. Для вращающих моментов, следовательно, можно записать;
ft
Мз (Кин / (п Моп-Мн) dt+ о
(1)
+ nMon-MH)sin a±e3
М,- (Кин / (пМоп-Мн) dt+ о
+ П Моп-Мн) +Ји ,
где К3, Ки - коэффициенты, определяемые конструкциями СМ 1 и 2;
п - отношение Мн к М0п в установившемся режиме;
БЗ , Ји - противоЗДС СМ 1 и 2 соответственно;
Do-амплитуда питающего напряжения обмоток статоров СМ 1 и 2;
t-текущее время.
Система уравнений записана с помощью фиг. 1 и 2, при этом противоЭДС Еи считаются перпендикулярными Фри и Фрз, а знаки + и - соответствуют работе СМ в генераторном и двигательном режимах.
Пусть в начальном состоянии
пМоп Мн.
(2)
При этом на выходе сравнивающего элемента 7 сигнал равен нулю, и действующее значение питающего напряжения обмоток задается выходным сигналом интегратора 9. Допустим, что увеличился Мн. При этом (см. фиг.2 а) ротор исполнительной СМ 2 поворачивается пр часовой стрелке, что приводит к повороту Феи и ФСз, а следовательно к увеличению М3. Поскольку, при этом на выходе сравнивающего элемента 7 появляется сигнал, выходной сигнал интегратора 9 растет до тех пор, пока не будет выполняться выражение (2). В противном случае валы будут вращаться с постоянным ускорением до тех пор, пока
оператор увеличением М0п не прекратит вращения. Новое состояние равновесия (покой или вращение с постоянной частотой) устанавливается уже при несколько ином значении а из (1), чем в предыдущем случае. Использование сумматора 8 и дополнительной связи с его входом выхода сравнивающего элемента 7 применено для улучшения динамики системы.
Уменьшение Мн вызывает обратный процесс. Если же, к примеру, возрастает М0п, увеличиваются также угол аи сигнал на выходе сумматора 8, что приводит к возрастанию Ми и вращению исполнительного вала в сторону поворота задающего с ускорением до выполнения (2). Аналогичный процесс происходит и при уменьшении М0п, только вращение происходит в противоположном направлении.
Если же изменяется направление Мн, изменяется и знак сигнала рассогласования на выходе сравнивающего элемента 7, и положение равновесия может быть достигнуто только после инвертирования управляющего воздействия на выходе сумматора 8, т.е. перехода конфигурации полей из показанной на фиг.2, а в показанную на фиг,2,б (или наоборот). Таким образом обеспечивается обратимость по моменту и его знаку, а также дистанционная передача угла поворота.
Положительный эффект устройства заключается в повышении точности отражения нагрузочных моментов и ощущения их
й
Q ф
РЗ
Фсз
0°
cCfj
еФри
Феи
-.
0L
оператором. Он достигается за счет введения в устройство моментных датчиков и математической обработки их сигналов для регулирования моментов синхронных ма- 5 шин.
Формула изобретения
Устройство для дистанционной переда- 10 чи угла поворота задающего вала, содержащее укрепленную на задающем валу синхронную машину, исполнительную синхронную машину с датчиком положения, по- лупроводниковый коммутатор с
15 коммутирующим и управляющим входами, к выходам которого параллельно подключены обмотки статоров синхронных машин, а с его коммутирующим входом соединен выход датчика положения, и сравнивающий
20 элемент, отличающееся тем, что, с целью повышения точности отражения нагрузочных моментов, в устройство введены сумматор, интегратор и два датчика момента, установленные соответственно на зада25 ющем и исполнительном валах, выход каждого датчика моментов подключен к соответствующему входу сравнивающего элемента, выход которого подключен к первому входу сумматора и входу интегратора, вы30 ход интегратора подключен к второму входу сумматора; выход которого соединен с управляющим входом полупроводникового коммутатора.
и
W
