Изобретение относится к области электротехники и автоматики и может быть использовано в следящих системах двустороннего действия с вентильными двигателями копирующих манипуляторов с силомоментным очувствлением.
Целью изобретения является расширение функциональных возможностей устройства и снижение утомляемости оператора при работе с ним.
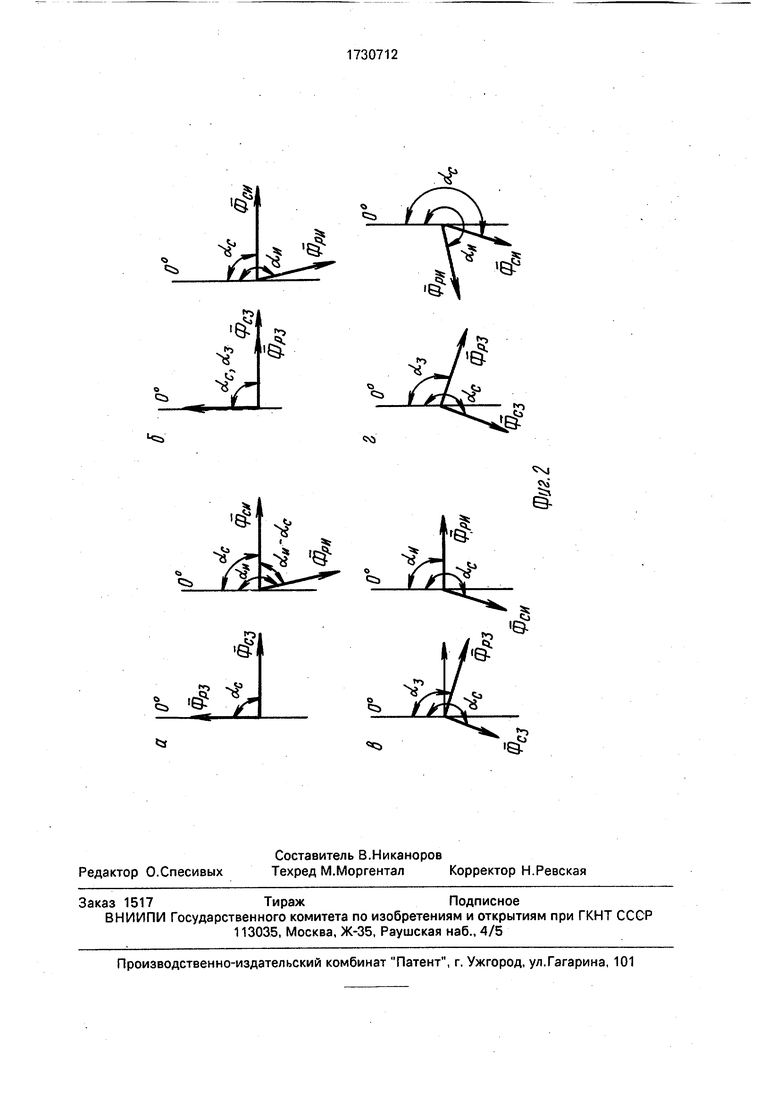
На фиг. 1 дана функциональная схема устройства; на фиг.2 (а,б,в,г) - векторные диаграммы магнитных полей, поясняющие его действие.
Устройство содержит задающую синхронную машину 1 с первым датчиком 2 положения, запоминающий элемент 3, сравнивающий элемент 4, второй датчик 5 положения, соединенный с валом исполнительной синхронной машины 6, ключ 7 с поданным на вход уровнем логической единицы, синхронный IK-триггер 8, компаратор 9, логическую схему И-НЕ 10 и полупроводниковый коммутатор 11 с коммутирующим 12 и управляющим 13 величиной тока входами. Позицией 14 отмечен управляющих вход запоминающего элемента 3.
На фиг.1, 2 и в тексте принятые следующие обозначения и сокращения: аз . 2и , Ос - углы поворота задающего и исполнительного валов и угловая ориентация магнитных потоков статоров синхронных машин 1 и 6; М0п, Мн - моменты оператора и нагрузки, действующие на задающем и исполнительном валах; М3, Ми - вращающие моменты задающей 1 и исполнительной 6 синхронных машин; ,ри ,фсз , - магнитные потоки роторов и статоров 1 и исполнительной 6 синхронных машин.
Устройство работает следующим образом.
При разомкнутом ключе 7 и 1 на выходе IK-триггера 8 запоминающий элемент 3 работает как повторитель, входной и выходной сигнал его одинаковы, и ориентация магнитных полей для этого случая представлена на фиг. 2а, т.е. вращающие моменты на валах синхронных машин можно записать следующим образом:
М3 КэОз-«и)(1)
Ми Ки ( «з - «и ) Sin I Ovt - Ос I
где К3, Ки - коэффициенты, определяемые конструкцией синхронных машин 1 и 6.
Положение статорных полей «с задается первым датчиком 2 положения так, что г/5рз перпендикулярен рсз при этом исполнительная синхронная машина 6 работает
как синхронная. Из (1) видно наличие отражения усилия на задающем валу (). В этом режиме структура и работа устройства аналогичны таковым в устройстве-прототипе.
При необходимости фиксации положения оператор замыкает ключ 7, на К-вход IK-триггера 8 поступит 1, которая установит в О выход триггера 8. Одновременно
единица появится и на инвертирующем С- входе IK-триггера 8, что не помешает ему установиться в нуль, но запретит дальнейшие переключения на все время замыкания ключа 7. Следует заметить, что в момент
переключения в силу работы запоминающего элемента 3 в режиме повторителя входной и выходной сигналы его были одинаковы, поэтому на инвертирующем выходе компаратора 9, подключенном к входу
схемы И-НЕ 10, О, а следовательно, на 1-входе IK-триггера 8, соединенном с его выходом, 1, что не помешает, однако, установке триггера в О в силу инвертирования IK-триггером 8 предыдущего состояния при
такой комбинации сигналов.
При появлении в силу описанных причин О на управляющем входе 14 запоминающего элемента 3 он переходит в режим хранения информации, которая задает на
коммутирующем входе 12 полупроводникового коммутатора 11 ориентацию статорных полей обеих синхронных машин постоянной, как и их амплитуду при постоянном Мн. Поэтому ротор исполнительной синхронной
машины 6 зафиксируется в том же положении C4i а ротор задающей синхронной машины 1 повернется практически до совпадения рз с рсз (фиг.2б), так как Моп 0 (предполагается, что оператор,
включив ключ фиксации 7, не прикладывает момента к задающему органу). После этого положения обоих валов будут зафиксированы.
При разжмыкании ключа 7 на С-входе
IK-триггера 8 появится О, разрешая изменение его состояния, которое произойдет в одном из двух возможных случаев: О поступает на один из входов логической схемы И-НЕ 10 с выхода компаратора 9, или сравнивающего элемента 4 (при совпадении ориентации роторов обеих машин в силу измененя знака Мн). О на выходе компаратора 9 появится лишь при установке ротора задающий синхронной машины 1 в то положение, в котором была осуществлена фиксация, т.е. при равенстве Мн Ми, М0п М3 (2). Поэтому включение в работу системы (т.е. появление единицы на l-входе триггера 8 и на его выходе), при котором запоминающий
элемент 3 перейдет в режим работы повторителя, произойдет лишь при увеличении Моп, необходимом для установки рз в положение, перпендикулярное фса т.е. плавно, без рывка, который произошел бы при отсутствии триггера 8, компаратора 9 и логической схемы И-НЕ 10, при прямом подключении ключа 7 к входу режима работы запоминающего элемента 3. На фиг.2в иллюстрируется ориентация магнитных полей при изменении знака Мн, приведшего к совпадению рз и ри , т.е. равенству «з и «и,в ходе переходного процесса, который начался в силу изменения знака на выходе сравнивающего элемента 4 и инвертировании, вследствие этого рез и рси.В процессе работы диаграмма на фиг.2в перейдет к аналогичной на фиг. 2а, диаграмме на фиг. 2г.
Положительный эффект предлагаемого устройства заключается в расширении его функциональных возможностей, т.е. в обеспечении фиксации положений задающего и исполнительного органов, причем включение в работу после окончания фиксации осу- ществляется без рывка, поскольку производится после увеличения противодействующего момента оператора до вели- чины, необходимой для полной компенсации вращающего момента задающей синхронной машины, отражающего имеющийся нагрузочный момент. Он достигается за счет введения в схему запоминающего элемента, синхронного IK-триггера, компаратора, схемы И-НЕ и ключа и соответствующих соединений между элементами устройства.
Необходимо отметить также простоту и связанную с этим высокую надежность устройства.
Реализация устройства возможна как на цифровых, так и на аналоговых элементах (в частности, запоминающий элемент
при цифровых датчиках положения можно выполнить на синхронных D-триггерах и т.п.).
Формула изобретения
5Устройство дистанционной передачи
угла поворота задающего вала, содержащее укрепленную на задающем валу задающую синхронную машину с первым датчиком положения, исполнительную синхронную ма0 шину со вторым датчиком положения, полупроводниковый коммутатор с коммутирующим и управляющим величиной тока входами, к выходам которого параллельно подключены обмотки синхронных машин,
15 сравнивающий элемент, входы которого соединены с выходами датчиков положения, а выход подключен к управляющему величиной тока входу полупроводникового коммутатора, отличающееся тем, что, с целью 0 расширения функциональных возможностей устройства путем фиксации положения задающего вала и упрощения эксплуатации, введены запоминающий элемент, компаратор, синхронный IK-триггер, ключ и логиче5 екая схема И-НЕ, при этом запоминающий элемент включен между выходом первого датчика положения и входом сравнивающего элемента, а вход запоминающего элемента подсоединен к одному из входов
0 компаратора, к второму входу которого подключен выход запоминающего элемента и коммутирующий вход полупроводникового коммутатора, при этом выход компаратора соединен с входом логической схемы И-НЕ,
5 к второму входу которой подключен выход сравнивающего элемента, а выход логической схемы И-НЕ соединен с l-входом синхронного IK-триггера, остальные входы которого К и С соединены с выходом ключа,
0 на вход последнего подан уровень логической единицы, а выход синхронного IK-триггера подключен к управляющему входу запоминающего элемента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1767637A1 |
| Устройство для дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1767636A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1690110A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1647789A1 |
| Устройство для дистанционной передачи угла поворота задающего вала с масштабированием усилий | 1985 |
|
SU1702494A1 |
| Электропривод переменного тока | 1987 |
|
SU1436264A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ УГЛА ПОВОРОТА ЗАДАЮЩЕГО ВАЛА | 1987 |
|
RU2072107C1 |
| Устройство для дистанционной передачи угла с масштабированием усилий | 1986 |
|
SU1817201A1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| Устройство для дистанционной передачи угла с масштабированием усилий | 1985 |
|
SU1617550A1 |
Изобретение относится к электротехнике и автоматике. Цель изобретения - расши- рение функциональных возможностей путем фиксации положения задающего вала Mpn и упрощение эксплуатации. Устройство содержит задающую синхронную машину 1 с первым датчиком 2 положения ротора, запоминающий элемент (ЗЭ) 3, сравнивающий элемент 4, второй датчик 5 положения ротора, соединенный с валом исполнительной единицы, синхронный IK-триггер 8, компаратор 9, логическую схему И-НЕ 10 и полупроводниковый коммутатор 11 с коммутирующими 12 и управляющим 13 величиной тока входами. ЗЭ 3 включен между выходами датчика 2 и входом сравнивающего элемента 4, а вход ЗЭ 3 подключен к одному из выходов компаратора 9, к второму входу которого подключен выход ЗЭ 3 через схему И-НЕ 10.В рабочем состоянии поля статоров обеих машин ориентированы перпендикулярно магнитному полю задающей машины, а их амплитуда пропорциональна рассогласованию валов. Устройство просто в эксплуатации, включение его в работу происходит без рывка, что повышает его надежность. 2 ил. (Л С Мн i CJ о s| ю 
| Проектирование следящих систем двустороннего действия | |||
| Под ред | |||
| B.C | |||
| Кулешова | |||
| М.: Машиностроение, 1980, с | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Петров Б.А | |||
| Манипуляторы, Л.: Машиностроение, 1984, с | |||
| Прибор для определения всасывающей силы почвы | 1921 |
|
SU138A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1984 |
|
SU1176425A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
