Изобретение относится к электротехнике и автоматике и может быть ис пользовано в следящих системах двустороннего действия (с вентильными электродвигателями), Цель изобретения - расширение функциональных возможностей, в частности диапазона воспроизводимых угло вых перемещений задающего вала, ; На фиг. 1 приведена функциональная схема устройства на фиг. 2 (а и б) векторные диаграммы, иллюстрируюрще принцип его действия. Устройство содержит задаюпщй вал управляемый оператором, на котором укреплен ротор. 2 синхронной машины 3 и первый датчик 4 положения. На испо нительном валу 5 устройства укреплены ротор 6 исполнительной синхронной машины 7, а также второй датчик 8 по ложения, идентичный первому. Выходы первого и второго датчиков положения подключены к входам сравнивающего элемента 9, выход которого соединен с управляющим входом полупроводникового коммутатора 10, К выходным клем мам последнего параллельно подключены одноименные статорные обмотки син .хронных машин 3 и 7. Устройство работает следующим образом. В режиме покоя задающего 1 и испо нительного 5 валов устройства имеет место некоторое рассогласование их угловых положений,которое выявляется датчиками 4 и 8 и сравнивающим элеме том 9. Указанное рассогласование, по ступая на управляющий вход полупроводникового коммутатора 10, предопре деляет глубину, например, широтноимпульсной позиционно зависимой модуляции напряжений на силовых Ьбмотках синхронных машин 3 и 7, т,е, величину потоков Ф и Ф с(, (результирующие потоки статорных обмоток синхронных машин на задающем и исполнительном валах). Пространственная ориентация последних одинакова и определяется угловым положением исполнительного вала, благодаря подключению выхода второго датчика 8 положения к коммутирующему входу полупроводникового комментатора и параллельной запитке силовых обмоток машин 3 и 7 от его выхода. При изменении, например увеличении, момента нагрузки на исполнительном валу на величину ЛМ (где Мц. вращающий момент на исполнительном вале) изменяется на некоторую величину и угол его поворота («в) и благодаря связи датчика 8 положения с коммутатором 10, на этот же угол изменяется пространственное положение статорных потоков Ф сэ как это показано на фиг. 2 а и б. Одновременно в peзyл Jтaтe увеличения рассогласования «; - к (где а - угол поворота задающего вала) при 06 3 const на величину Ao.i и связи сравнивающего элемента 9 с управляющим входом коммутатора 10, увеличиваются модули потоков Ф, и Фc(f. В результате на некоторую величину Д Mj изменяется момент Mj на задающем валу, поскольку последний определяется вь1ражением: Мз к Фр.Ф..81п(Ф„;Ф,,), -РЗ-С., cjгде Фр поток ротора синхронных машин на задающем валу. Таким образом, в предлагаемом устройстве имеет место отражение :моментов, развиваемых на исполнительном и задающем валах, т.е. оператор, управляя задающим ваЛом, ощу-щает нагрузочный момент на исполнительной стороне. При этом устройство работает как следящая система двустороннего действия без каких-либо ограничений на пространственное положение задающего вала и диапазон изменения углов 0,
9сз
Ф/73
ч
а.
)ф.
б.
Фиг. 2.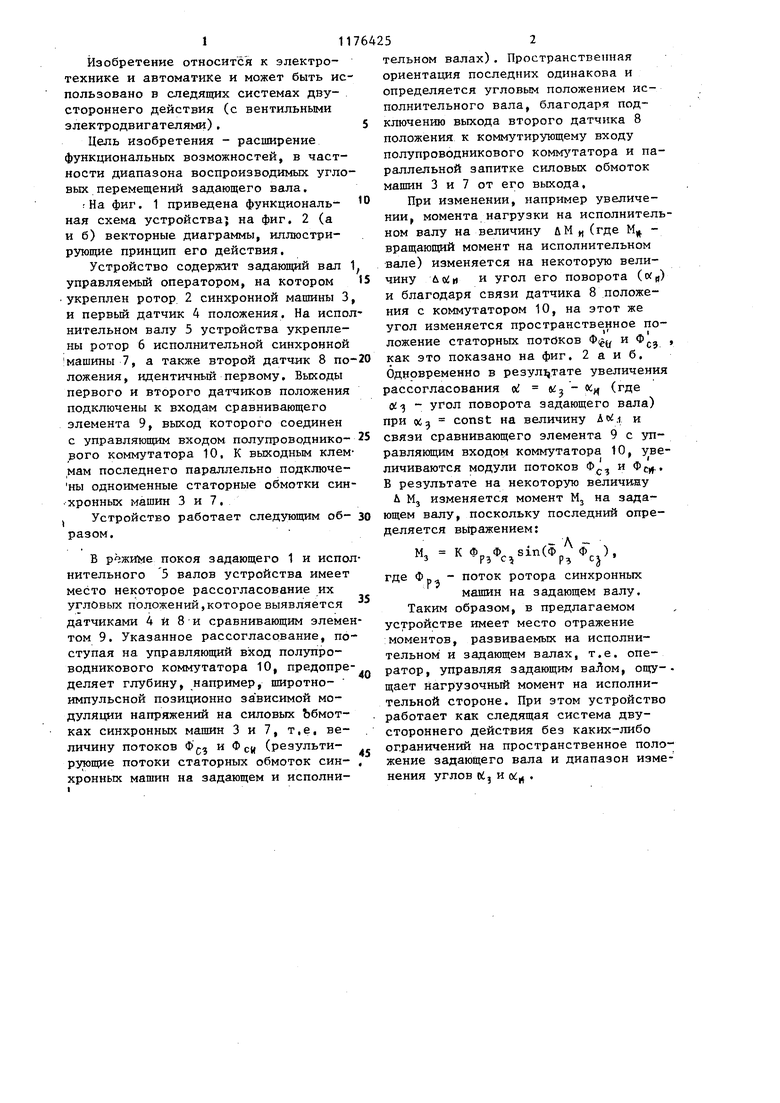
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1619371A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1984 |
|
SU1257690A1 |
| Устройство для дистанционной передачи угла поворота задающего вала с масштабированием усилий | 1985 |
|
SU1702494A1 |
| Устройство для дистанционной передачи угла с масштабированием усилий | 1985 |
|
SU1617550A1 |
| Устройство для дистанционной передачи угла с масштабированием усилий | 1986 |
|
SU1817201A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1690110A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1647789A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1730712A1 |
| Устройство для дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1767636A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ УГЛА ПОВОРОТА ЗАДАЮЩЕГО ВАЛА | 1987 |
|
RU2072107C1 |
УСТРОЙСТВО ДИСТАНЦИОННОЙ ПЕРЕДАЧИ УГЛА ПОВОРОТА ЗАДАЮЩЕГО ВАЛА, содержащее укрепленную на задающем валу синхронную машину с первым датчиком положения, исполнительную синхронную машину с вторь м, идентичным первому, датчиком положения и полупроводниковый коммутатор, на управляющий величиной тока вход которого через сравнивающий элемент встречно подключены выходы первого и второго датчиков, а к его выходу параллельно подключены силовые обмотки обеих синхронных машин, отличающееся тем, что, с целью расширения диапазона воспроизводимых угловых перемещений задающего вала, S выход второго датчика положения под(Л ключен к коммутирующему входу полупроводникового коммутатора. 05 u to СП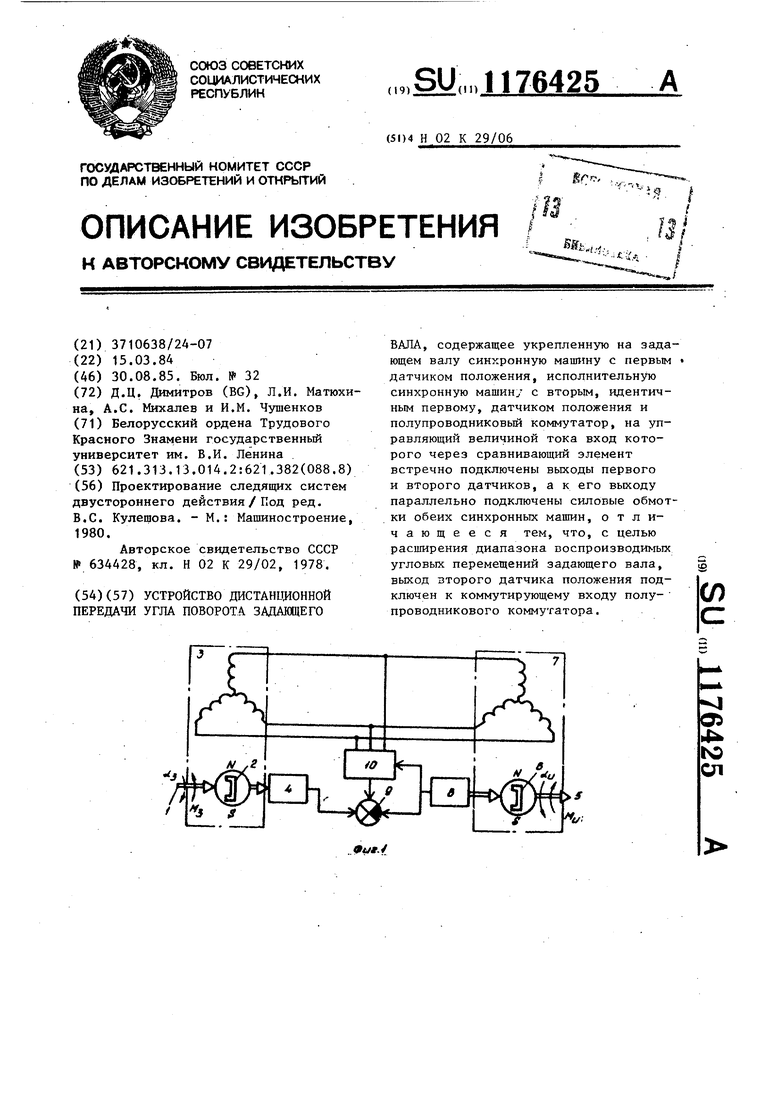
| Проектирование следящих систем двустороннего действия / Под ред, B.C | |||
| Кулешова | |||
| - М.: Машиностроение, 1980 | |||
| Устройство дистанционной передачи угла поворота задающего вала | 1977 |
|
SU634428A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
