а 0:
00
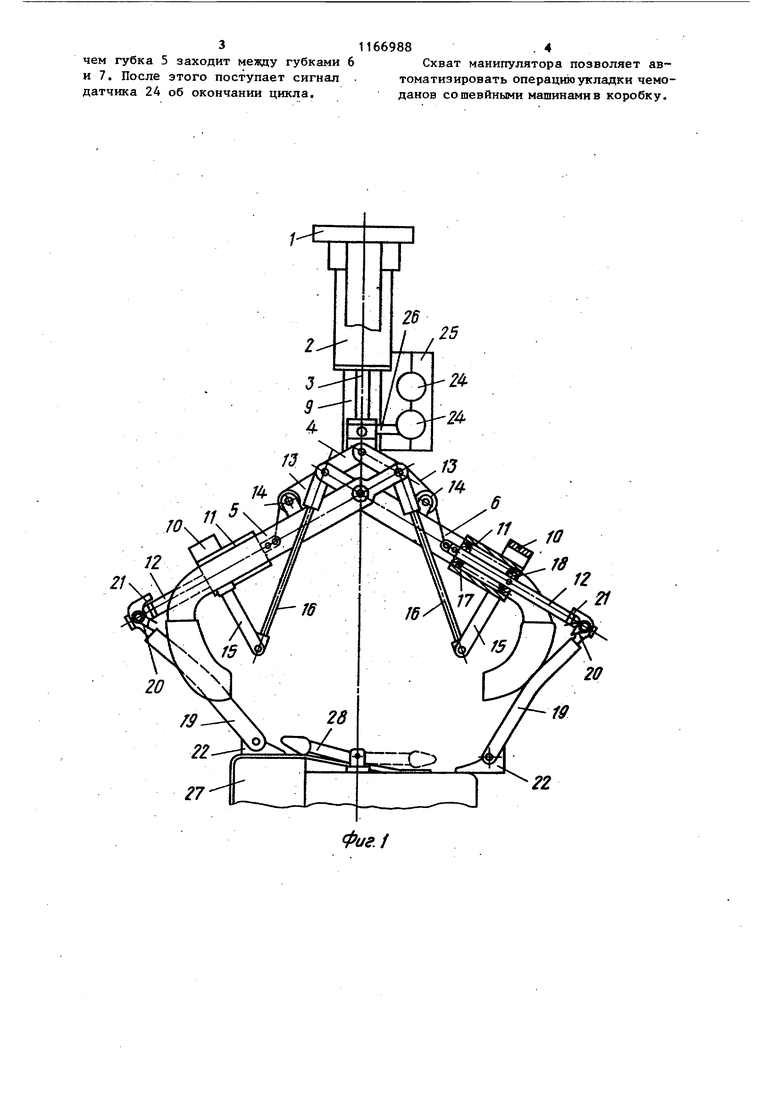
оо 1 Изобретение относится к упаковке грузов или материалов, в частности к упаковке чемоданов со швейными машинами в коробки. Известен схват манипулятора, содержащий привод и зажимные губки, св занные с приводом через шарнирно-рыча ный механизм ГО- Недостаток известного устройства заключается в невозможности захвата ручки чемодана из любых ее положений. . Целью изобретения является растирение технологических возможностей за счет обеспечения предварительной ор не и т ации из де лия. Цель достигается тем, что схват манипулятора, содержащий корпус, при вод и зажимные губки, связанные с приводом через шарнирно-рычажный механизм, снабжен механизмом ориентации, выполненным в виде подпружиненных относительно губок лап и цилиндi)OB, установленных с возможностью по ворота на зажимных губках и соединен-25 ных с помощью рычагов с верхними ко цами противоположных зажимных губок а также телескопических звеньев, пр ходящих через цилиндры и соединенны одним концом с помощью гибкой связи с верхними концами противоположных зажимных губок, а другим шарнирно связанных с подпружиненными лапами, на противоположном конце которых . установлены дополнительно введенные подпружиненные пальцы.. На фиг. 1 показан предлагаемый схват, исходное положение; на фиг.2 то же, рабочее положение; на фиг.3 то же, вид сбоку. Схват манипулятора содержит корпус 1, выполненный в виде рамки, к которому прикреплен пневмоцилиндр 2 шарнирно связанный посредством штока 3 и звеньев 4 с тремя губками 5, 6 и 7, вращающимися на оси 8, закрепленной в проушинах рамки 9 корпуса 1. На осях кронштейнов 10, приваренных к губкам 5 и 7, установлены цилиндры 11, в которых поступательно перемещаются телескопические звенья 12, к верхним концам которых прикреплены тросики 13 через блоки 14 и соединены верхними концами противоположных губок 5 и 7. 55 Цилиндры 11 через жестко соединенные с ними рычаги 15 и тяги 16 шарнирно соединяются с верхними концами про88тивоположных губок 5 и 7. Цилиндры 11 снабжены пружинами 17, которые через поршни 18, жестко соединенные со-звеньями 12, удерживают последние в исходном положении. На нижних концах звеньев 12 шарнирно установлены лапы 19, удерживаемые в исходном положении пружинами 20 и упором 21. На нижних концах лап 19 шарнирно установлены пальцы 22, удерживаемью в исходном положении пружинами 23. Контроль исполнения команд на раскрытие и закрытие схвата осуществляется датчиками 24, установленными в обойме 25, и флажком 26, закрепленным на штоке 3 пневмоцилиндра 2. Устройство работает следующим образом. При опускании корпуса 1 схвата пальцы 22 касаются горизонтальной поверхности чемодана 27, при этом за счет подпружиненных шарнирных соединений пальцев 22 с лапами 19 и лап 1 9 со звеньями 12 обеспечивается копьфование поверхности чемодана, так как чемодан может устанавливаться выступающей частью крышки как вправо, так и влево. После поступления команды на закрывание схвата шток 3 пневмоцилиндра 2 перемещается вверх при помощи звеньев 4, поворачивая губку 5 навстречу поворачивающимся губкам 6 и 7. Так как цилиндры 11, установленные в кронштейнах губок 5 и 7, шарнирНо связанны с верхними концами противоположных губок через рычаг 15 и тягу 16, то при повороте губок 5 и 7 цилиндры 11 поворачиваются в осях кронштейнов 10 навстречу друг другу. Одновременно происходит поворот и телескопических звеньев 12 лап 19 и пальцев 222. После того, как цилиндры 11 повернутся на определенньй угол и один из пальцев 22 подхватит ручку чемодана 27, телескопические звенья 12, соединенные тросиками 13 с верхними концами противоположных губок 7 И 5, начинают перемещаться вверх, поднимая ручку 28, обеспечи-. вая этим предварительньй подхват и подъем ручки 28. После подъема ручки 28 на определенную величину ее подхватывают губки 5, 6 и 7 и производится ее окончательный захват, при3чем губка 5 заходит между губками и 7. После этого поступает сигнал датчика 24 об окончании цикла. 1166988.4 6 Схват манипулятора позволяет ав томатизировать операцшо укладки чемоданов сошевйными машинами в коробку.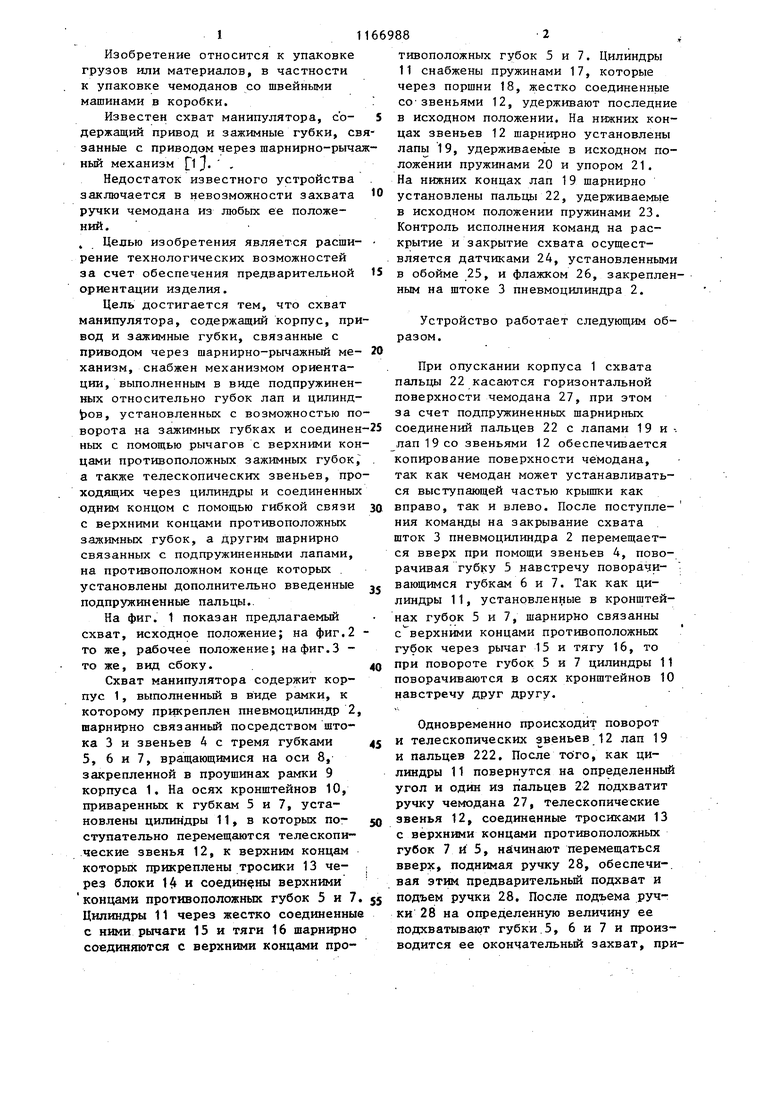
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1985 |
|
SU1294605A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Схват манипулятора | 1986 |
|
SU1342726A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Схват манипулятора | 1986 |
|
SU1366391A1 |
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| Схват | 1984 |
|
SU1177153A1 |
| Схват промышленного робота Саблина В.П. | 1982 |
|
SU1060470A1 |
| Схват промышленного робота | 2023 |
|
RU2813251C1 |
| Манипулятор для герметизированного пространства | 1988 |
|
SU1618651A1 |

СХВАТ МАНИПУЛЯТОРА, содержащий корпус, привод и зажимные губки, связанные с приводом через шарнирнорычажный механизм, о т л и ч а ющ и и с я тем, что, с целью расширения технологических возможностей за счет предварительной ориентации захватываемого изделия, он снабжен механизмом ориентации, выполненным в воде подпружиненных относительно губок лап и цилиндров, установленных 9 возможностью поворота на зажимных губках и жестко соединенных с .помо11(ью рычагов с верхними концами противоположных зажнмшлс губок, а также телескопических звеньев, проходящих через цилиндры и одним концом соединенных через гибкую CBlisb с верхними концами тех же зажимных губок, а другим - шарнирно связанных с подпружинентоми лапами, на другом конце которых установлены (Л дополнительно введенные подпружиненные палыцл.
/Фиг/Е
Фиг. 2
| Пособие по применению промьшленных роботов | |||
| Под ред | |||
| Кацухико Нода | |||
| М,, Мир , 1975, с | |||
| ТЕЛЕФОННЫЙ АППАРАТ, ОТЗЫВАЮЩИЙСЯ ТОЛЬКО НА ВХОДЯЩИЕ ТОКИ | 1920 |
|
SU273A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
