ГО
Од
задающий блок 11, С одного ,Е1 блока 11 на один из входов ЭС 9 по-дают сигнал 5 пропорциональный достигаемому крутящему моменту М, С другого выхода блока 1 сигнал поступает на вход НЭ 7„ Этот сигнал осуществляет моделирование синтезирующей функции с учетом входных сигналов блока 1 (глубина И скважины жесткость С колонны и коэф, редукн,ии Кр). Сигналы с Д 4 и 5 поступают соответственна на входы блока 6,, на второй вход НЭ 7 и второй вход
63Я23
ЭС. ч, г.сли текуччре значение момента М ,ру Г1ревь1сит 1:),,,, 3 то с выхода ЭС. 9 поступит сигнал па первый вход элемента 8 и Д 5 подключится к первому входу ЭС О, С выхода ЭС 10 сигнал поступает на вход блока 3, где формируется сигнал управления торможением, В процессе управления торможением происходит умепы ение величин М .. При дост1 7сении ими заданнь х значений с блока 6 на блок 3 поступит сигнал, снимающий управления с привода 2, Я ил., 1 табл.
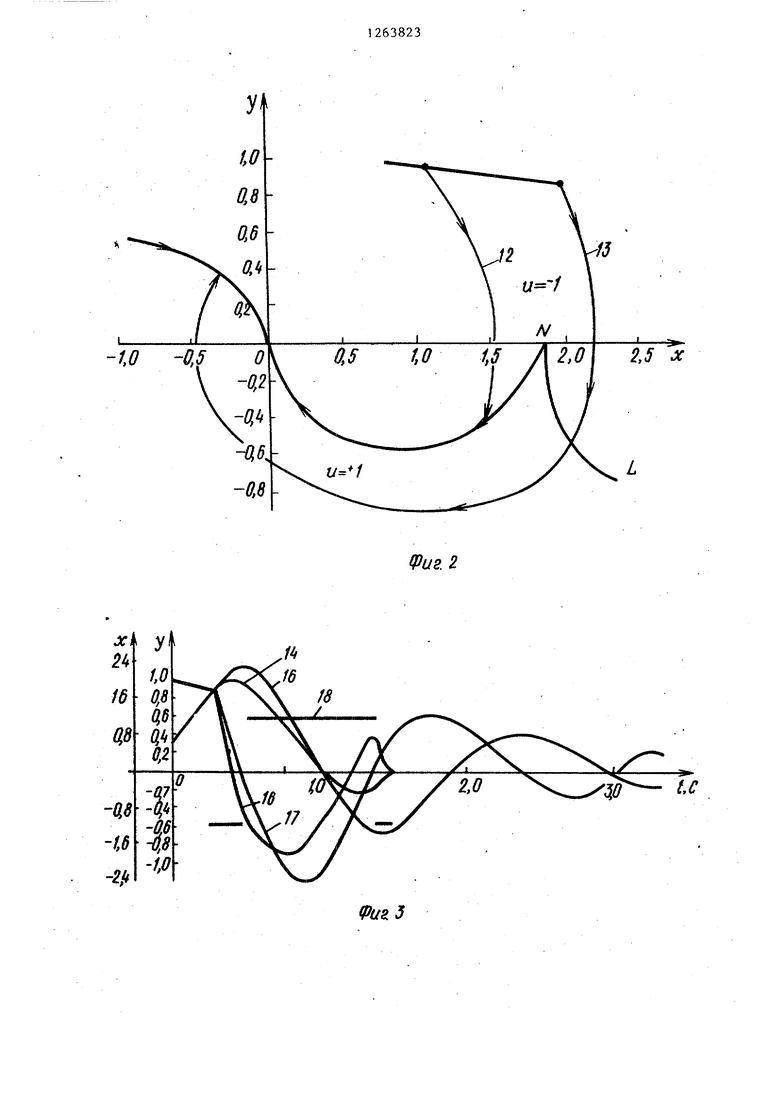
Изобретение относится к области контроля и управления процессом бурения скважин и позволит повысить эффективность защиты бурильной колонны от обрьшов и скручиваний. Устройство содержит привод 2 бурильной колонны 1, блок 3 управления, блок 6 от-ключения управления, датчик (Д) 4 частоты и) вращения Д 5 крутящего момента М, нелинейный элемент (Ю) 7, переключающий элемент 8, элементы сравнения (ЭС) 9 и )0 и с S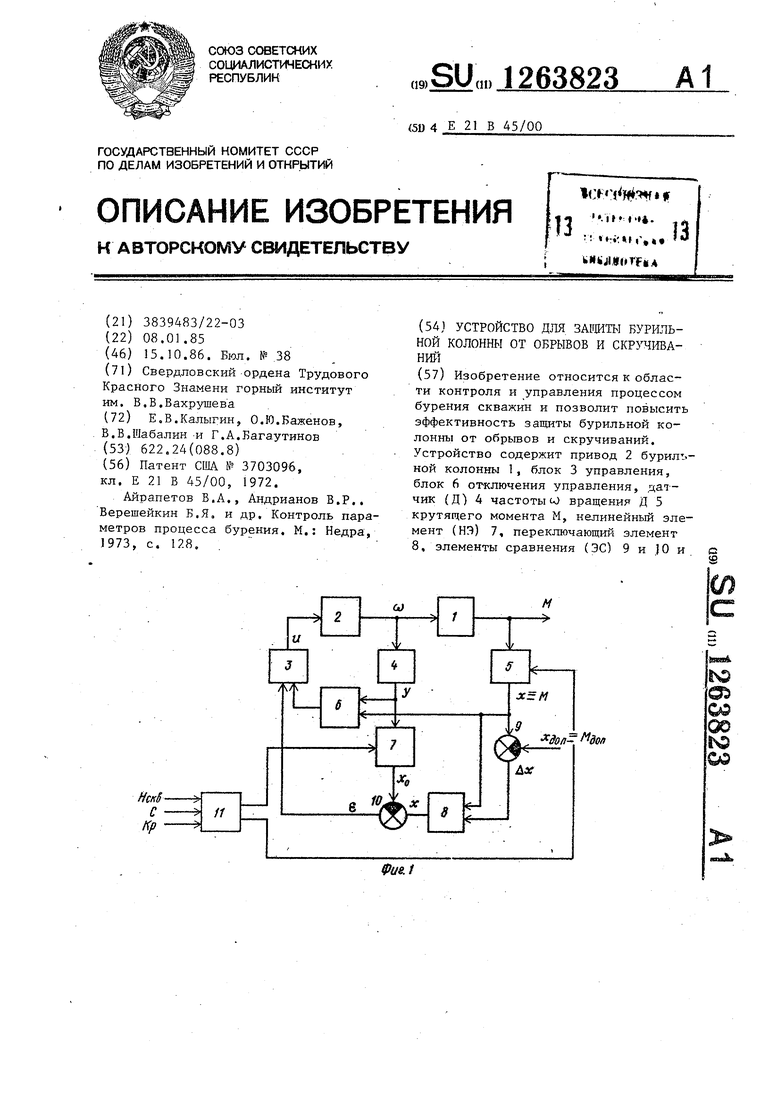
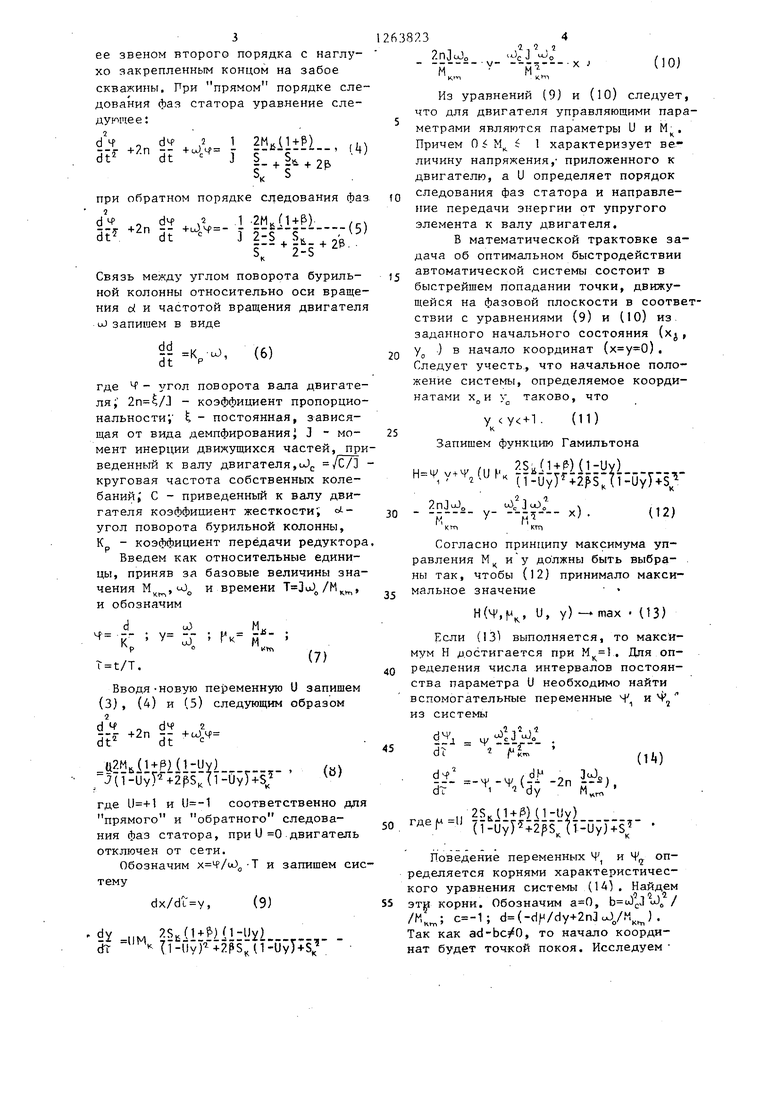
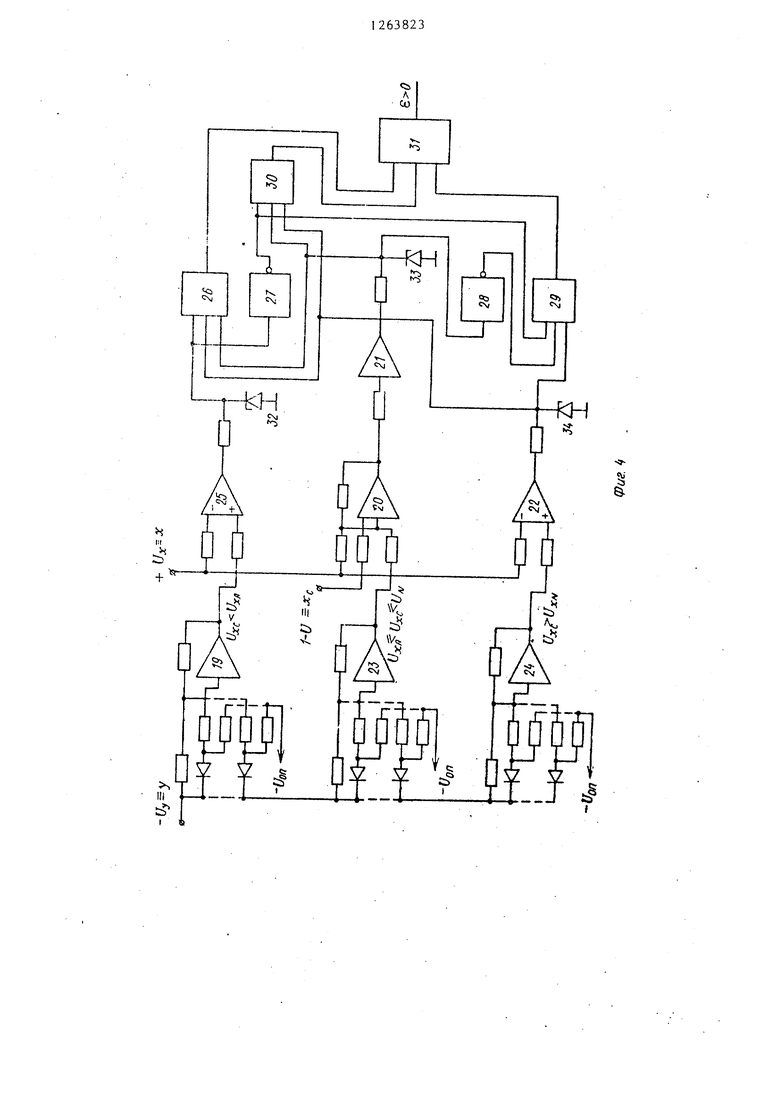
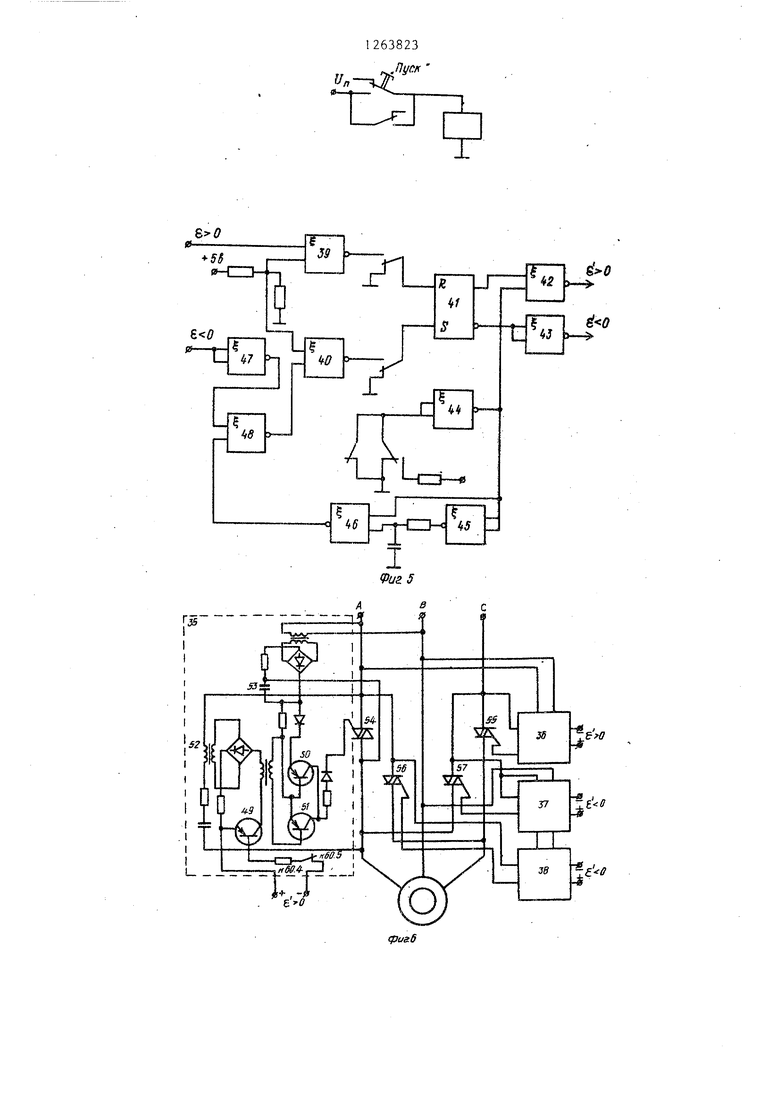
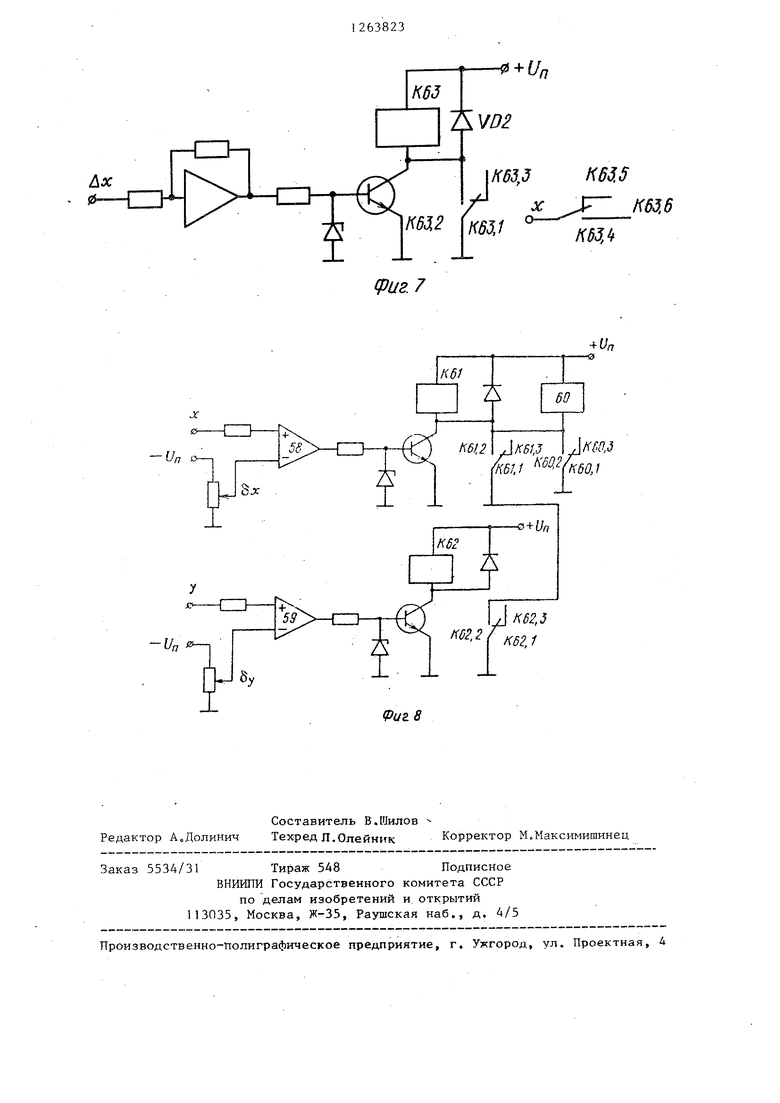
Изобретение относится к контролю и унравле П-1ю процессом бурения сква и предназначено для завгиты бурильной колонны от обрЫВОп; и СКручиваниЙ5 которые могут произойти в случае прихвата, зашламопапии забоя или нрижога коронки назабое скваЦель изобретения - повышение эффек1ивкссти защиты бурильной колонны от обрывов и скручиван:-тй. На фиг. 1 приведена блок-схема устройства, на фиг. 2 - C:i rre3i;-ipy 0иая функция и фазовые траектории при оптимальном унравлепии; на фцгS 3 переходные процессы в системе при оптимальном уиразленин и при отключении электродвигателя вра щателя от сети; на фиг, 4 функциональная схема нелинейного элемеп та, моделир-утащего зависимость (у, и второго элемента управления; на фиг, 5 и 6 - функциональная схема блока управления;, на фиг„ 7 -функциональная схема блока огключеНИН управления; на фиг, 8 - функцио нальная схема переключающего элемента. Устройство позволяет осуществить контроль частоты вращения бурильной колонны и величины приложенного к ней момента и на основании этого сформировать управление процессом торможения бурильной колонны - опти мальное н смысле быстродействия и,, следовател.ьно5 оптимальное с позици гашения кт нетической энергии. накопленной S. приводе. Для синтеза опти мальной системы воспользуемся принципом максимума Уравнение меканическ(зй гарактеристики асинхронного двигателя имеет вид м. 2M,(u. , S S,, ., -b.f.. где М - врардаюишй момент; М,, - критический момент,, соответствующий прял оке ЦП ому фазному пar pяжeниюj S--( ) А-Л- скольжепие ; cOj и uj синхрош-гая и текуи ая -угловые частоты вранг.ения вала двигателя; S критическое скольжение, Э- коэффициент. завр) от сопротивления обмоток, Ставится задача синтеза алгоритма управления с использованием напряжения (П при условии,, что на величину подводимого напряжения U к двигателю наложено ограгичение О и и.,,,, , (2) Причем зависимосттз Н. -f(Ll) является нелинейной, поэтоад (2) и ограничениесвязаны не.т1нпейной зависимостью, где -Kvn 1аксимал1 ная величина критичес.кого момента, соответст:-зугощая U . Используя вьфажения для процессов в двигателе, запишем уравнение динамики системы электродвигательбуровая колонна, представив последнюю одномассовой системой и описав + ниже линии MONL и на U(y,x) ге ON. -1 выше линии MONL и на ге МО. По результатам анализа переходных процессов установлено, что пре лагаемое устройство позволяет снизить динамические нагрузки в бурил ной колонне более чем на 10% (см. кривые 14 и 16 на фиг. З).На фиг.З обозначены: 14 и 15 - координаты угла закрутки бурильной колонны, п веденного к валу двигателя, и част ты вращения двигателя бурового ста ка при оптимальном управлении; 1617 - координаты угла закрутки и ча стоты вращения, полученные с испол зованием известного устройстваi 18 управляющий параметр U . Максималь ные значения углов закрутки для кри вой 14 - 1,98 от. ед., для кривой 15 - 2,25 от. ед. и разница равна 0,27 от. ед., что соответствует 478 Время переходного процесса сокращено более чем в 3-5 раз, а максимальное значение отрицательного момента уменьшено на 25-30%, Последнее свидетельствует о снижении вероятности возникновения неупругих деформаций в колонне бурил ных труб при защите ее от обрывов, что повьппает эффективность н надеж. ность работы устройства. Функциональная схема нелинейного элемента 7, моделирующего зависимость Xj.f(y) в четвертом квадранте, и схема второго элемента 10 сравнения, формирующего значение 0, приведены на фиг. 4. Представлена схема, моделирующая зависимость (y) только в четвер том квадранте фазовой плоскости х и у. Во втором квадранте схема аналогична, вследствие того что синтеэирующая функция симметрична относи тельно начала координат. На операционных усилителях ОУ 19-22 собраны функциональные преобразователи, моделирующие кривую Хс f(Y). На ОУ 19 собран диодный функциональный преобразователь, моделирующий часть Xj, f(y} от точки О до точ ки А, где dy/dx 0 (на фиг. 2 точка А не показана). На ОУ 23 и ОУ 20 собран функвдю нальный преобразователь, моделирующий X,. (у) от точки А до точки N. На ОУ 24 собран фyнкциoнaJIЬный преобразователь, моделирующий, кривую N L (см, фиг. 2) . На ОУ 25, ОУ 20, ОУ 22 и микросхе мах 26-31 собран элемент сравнения формирующий значение 0. Схема работает следующим образом. В начальный момент времени торможения при уменьшается частота вращения у. При переходе у через ноль на выходе ОУ 19, ОУ 20 и ОУ 24 появляются напряжения, моделирующие кривую ON . Причем эти напряжения положительны. Допустим, движение осуществляется по траектории 13 (см, фиг. 2), так как текущее которых сравнение значение , происходит на ОУ 25, при этом на стабилитроне 32 напряжение равно нулю, так как на выходе ОУ 25 оно отрицательно. На стабилитронах 33 и 34 напряжение также равно нулю. По мере уменьшения у происходит, пересечение траектории 13 с кривой NL и при срабатывает компаратор, собранный на ОУ 22, на выходе которого напряжение станет положительным. В результате на выходе 29 появляется логическая 1. На выхода 31 также появится логическая 1, характеризующая значение 0, Схема работает таким образом, (см. фиг, 4) что при пересечении траектории движения системы с кривой ONi на выходе 31 появл.яется на пряжение пропорциональное 0. Переключение осуществляется в соответствии с выражением Uj,. и„. Ц V15 У5 - напряжение на выходе где wy Uy инверсия Uv билитронов, Рассмотрим еще один случай двиения системы по траектории 12 фиг. 2). Здесь не соблюдено услоие переключения . При движеии, системы по траектории 12 в моент совпадения точки этой траектоии с точкой на кривой ON и при х,. х+&, где Б- бесконечное малое чисо, на выходе ОУ 20 напряжение приимает . отрицательное значение, коорое инвертируется ОУ 21. С выхода У 21 напряжение поступает на вход икросхемы 30, на два других входа оторой поступает логическая 1, т 34, так как на участке NL х,х, от 27 инвертированный ноль от 32, так как на ОА . На выходах 30 и 31 появляется логическая 1, Описан юе соответствует первому слагаемому в правой части уравнения (1) Задающий блок 11 состоит из переключателя, на котором выполнен задатчик Н 5 потенциометра - задатчик С и переключателя - задатчрж Кр. Задатчик Н..„ предназначен для переключения набора нелинейных элементов, расчитанных на определенную глубину скважины. Набор нелинейных элементов используется потому,что бурильная колонна - на стационарное звено, с изменяющимися маховыми массами и жесткостями. Изменяется также и частота вращения бурильной колонны ограниченная но глубине сква жины либо мощностью двигателя вращателя, либо износом колонны буриль ных труб, в связи с чем требуется корректировка кривой х(у) Реализация такой корректировки осуществл ется переключателем (задатчиком) глубины скважргны, подключающим тот или иной функциональный преобразова тель в составе нелинейного элемента 7, Исследования изменения зависимостей х(у) от глубины сквахины по казали, что при глубине сква ч-гны бо лее 6ПО м кривая MONL вырождается в дугу и далее (более 750 м) в часть дуги. Это облегчает изготовление па кета программ (набора функциональных преобразователей). Бурение скважин может осуществляться бурильньми трубами, выполне ными из различных сталей и имеющих разные диаметры. Поэтому с целью уточнения кривой переключения задат чиком С изменяют значения опорного напряжения, подаваемого во входные цепи ОУ 19, ОУ 23 и ОУ 24 (фиг. 4).. Этим самым осуществляется смещение кривой х(у) относительно начала координат. Такое регулирование возможно в процессе наладки; нелинейного элемента. После наладки нелинейного элемента осуществляют подбор резисторов для потенциометра С. Изменение частоты вращения буриль ной колонны посредством коробки ieредач станка влечет за собой и изменение величины момента, приведенного к валу двигателя. Для приведения момента к валу двигателя предназначен задатчик Кр. 3 , , 4 Износ бурильной колонны определяется посредством замеров ее внешнего диаметра. С износом колонны уменьшается и допустимый момент, передаваемый ею. Например, при диаметре бурильных труб, равном 50 мм (новые трубы), из стали 36Г2С допустимый момент составляет 1200 Нм, Изношенные трубы до диаметра от 47,5 до 45,8 мм имеют допустимый вpau aющий момент 300 Им. В предлагаемом устройстве значение вводится задатчиком, вьтолненным на потенциометре, при превышении которого на выходе первого элемента сравнения 9 (фиг, 1) появляется сигнал дх, который поступает на вход переключающего элемента 8 (фиг. 7), Значе шя- Мд,, с глубиной скважины никак не связаны. ЗначенияSx и $у используются для того, чтобы по окончании переходного процесса (перехода системы через ноль плоскости X и у) система не совершала рысканья у начала координат. Величина Sy. и 6у определяется при расчетах кривых переключения и времени переходного процесса. Для примера, приведенного на фиг. 2 и 3, они составилиSY 0,18 ,3 отн.ед,, выбранные по времени переходного процесса, равном О.,22 с. Это время обусловлено моментами инерции при- вода, постоянная времени которого для данного примера равна (фиг. 2 и 3) 0,22 с. Функциональная схема блока 3 управления приведена на фиг, 5 и 6. Он состоит из четырех идентичных схем управления, две из которых осуществляют управление приводом при прямом порядке следования фаз статора 35 и 36 и две - при обратном 37 и 38, а также из схемы логики блока управления (фиг„ 5), содержащем логические элементы 38-48. Схема логики блока управления обеспечивает запуск привода и его работу в процессе запдиты,, Работа пояснена таблицей состояния выходов логических элементов 39-48 и схемой переключающего элемента В, которая дана на фиг. 7. Ка входы 35 и 36 подается напряжение, пропорциональное .S О ), При его подаче отпирается транзистор 49, что приводит к переключеее звеном второго порядка с наглухо закрепленным концом на забое скважины. При прямом порядке сле дования фаз статора уравнение следующее:d ,, d. 1 2И,(1.Р)., ,, dt dt J S S 2Б - - -к К - при обратном порядке следования фа d- .2„ .4W 1 ,(5 4t J |.S,|..,2S,. Связь между углом поворота бурильной колонны относительно оси враще ния d и частотой вращения двигател uJ запишем в виде fj.K,, (6) где Ч - угол поворота вала двигате ля - коэффициент пропорцио нальности, - постоянная, зависящая от вида демпфирования J 3 - момент инерции движущихся частей, пр веденный к валу двигателя,iJj, /С/ круговая частота собственных колебаний; С - приведенный к валу двигателя коэффициент жесткости; угол поворота бурильной колонны, К - коэффициент передачи редуктор Введем как относительные единицы, приняв за базовые величины зна и времени ) /М, чения М, uj и обозначим MK Ы . Вводя-новую переменную U запишем (З), (4) и (5) следующим образом d 4 „ d4 2 .„ .2п 5- .4 U2Mjl+p)(l-Uy) J(1-Uyy -f2fiSjl-OyJ+Sj JK - к где 1)+1 и соответственно ддя прямого и обратного следования фаз статора, двигатель отключен от сети. Обозначим )д -Т и запишем сис тему dx/dL y, (9) dy ,|м .(lilHlzUy). . J. -11 IV «i.,.ii.ii.. dT (l-lly).PS(1-Uy)+S 23 ,.,--.,.-. X. Из уравнений (9) и (lO) следует, что для двигателя управляющими параметрами являются параметры U и М , Причем О М 1 характеризует величину напряжения, приложенного к двигателю, а U определяет порядок следования фаз статора и направление передачи энергии от упругого элемента к валу двигателя. В математической трактовке задача об оптимальном быстродействии автоматической системы состоит в быстрейшем попадании точки, движущейся на фазовой плоскости в соответствии с уравнениями (9) и (10) из заданного начального состояния (xj, Уд ) в начало координат () . Следует учесть, что начальное положение системы, определяемое координатами Хди у таково, что . (11) Запишем функцию Гамильтона ц ш hiM -Sii(l + )(l-Uy) , .U ,(j-y;-V .nJuJ - N - -- -- у- -.,- х) . К ПКТТ1 Согласно принципу максимума управления М| иу должны быть выбраны так, чтобы (12) принимало максимальное значение N(4,1, и, у)--max - (13) Если (131 выполняется, то максиум Н достигается при . Для опеделения числа интервалов постоянтва параметра U необходимо найти спомогательные переменные Ч, и У з системы 5г %--ГГ-- . d± .v.H.(A.2n ) dt dy M,J .. 2S., (1 + Э) (1-Uy) де.1) -.--,---..-------,- . Поведение переменных Ч, и Ч. опеделяется корнями характеристичесого уравнения системы (lAl . Найдем ти корни. Обозначим , b iJ|; -, / К,; d(-d /dy+2n34/ wb ак как ad-bc 0, то начало коордиат будет точкой покоя. Исследуем дискриминант системы (14) . Характеристическое уравнение имеет вид 1 -d-1 ,В этом уравнении обозначим , +d +2nJ4/M. f- и иссл г Чт дуем d,. Возьмем производную d//dy (И . 1Т-иуУ ;2р§ЛТ иуТ+5 Если , , , то dM/dy -2(l+p)/S kip/dyl 0. Причем 0 для всех . Если и и,+, (1+Р) (1-5)/ / (1+2Э5, +S, ) - d/u/dy 25 . Причем dP/dy О для всех у . Запишем дискриминант системы (14). D(a-d)(- л .nJa.)/M ), 2 dy - ° Km -wj.j и , то D о, так Если у 1у ().Чт Поэтому начало координат будет седлом, а функ ции Ч и Ц имеют вид y A expSjt (1,2) (15) Если у i У((то D О, так как (- -:- + 1 2. +2пТ) (л , а начало координат будет фокусом: . Следовате,пьно функции Ч и Ч имеют вид . (Ьс S inT t+bCjCosT t) ; (16) & ((,c,)sint, t4r,c/6c, ),(17) где б 0,5d, ,5/. Найдем число интервалов переклю чения управляющего параметра U. Не теряя общности рассуждений в выражениях (16) и (17) положим, что е° 1, так как этот множитель не ок зывает влияние на число интервалов переключения управляющего параметра U. Зададимся начальными услов ями y,(, ( , . Опре делим постоянные интегрирования с,./Ти)Т и 0,0. Тогда (16) и (1 примут вид Нг X/--D Й5т выполнения соотношения (13) необходимо вьтолнение неравенства 4;(U(1-Uy)) 0. Учитывая, что в конечные момен™ времени переключение управления будет происходить в интервале изменения , X J исследуем возг можные случаи. Если УчО, то при -у у у (dy/dt O). к Если Ч.0, то при -у (dy/dr o) Следовательно, (13) вьшолняется при 1 и выполнении соотношения U sinn4,5igri (-- + По1 +cosr;,t).-Рассмотрим интервал изменения , у . В этом интервале Y, и 4 изменяются по закону (15) . Причем при переключении управляющего параметра U конечные значения и 7 РУДУТ начальными значениями для интервала , и наоборот. А так как в начало координат можно попасть, двигаясь только по той части механической характеристики, которая ведет в него, то и функция Н изменяет свой знак при lye Л, у один раз. Следовательно, на этом интервале один раз изменя.тся и управляющий параметр U. Если это не так, то система никогда не попадает в начало -координат. Таким образом, . в интервале , у управление изменяется по закону U signy sign(,i:+A expS :-). (20) Для получения синтезирующей функции исключим из уравнений (9) и (Ю) времяТ . Имеем . dy ... 2S(Up)(l:yy) -- ... ;.i.i.-- dx П (ьиуУ +2р5 1-иуУ+5 . х- К1-ПК.М Уравнение (21) представляет собой нелинейное дифференциальное уравнение, решить которое не представляется возможным. Поэтому, положив в 21 , имеем fdx/dt y . ldy/dt -2NTy-(. Исследуем (22) . Дискриминант D (2пТ), 6 + ii, -пТ+ +0,5 /D, тогда общее решение (9) и (10) имеет вид -итг; ); (23) (с costal: -нт (е, с, sint-L +(t, с -f+бс )cos7 Таким образом, найдено, что фазовые траектории системы (22) пред ставляют собой спирали с положение равновесия в начале координат и направлением вращения по часовой стр ке. Если сравнить систему (9) и (ю) с системой (22), то видим, что фазовые портреты получаются параллельным переносЪм, т.е. положени равновесия системы (9), (Ю) расположено не в начале координат. В теч ние управления положение равновесия будет изменяться ввиду нелинейности (9) и (Ю). Однако получаем след ющее утверждение о структуре оптимальных траекторий. В течение времени точка описывает дугу фазовой траектории при , причем t величина переменная, а d началь ная фаза. 13атем при точка описывает дугу фазовой траектории в те чение времени d А и т.д. Таким об разом, для синтеза оптимального управления применима теорема об п интервалах. С целью решения системы (9), (10 линеаризуем механическую характерис тику двигателя, положив р. ирл|-К|У ИГ1 ,;+К|У (1 1,.. ,п), где м,, и К i - коэффициенты линеаризации урав нения (y), при ,...,K в интер вале уеГУ, , 1 и при i K+1 ,.. . ,п, в интервале , у , Тогда система (9), (10) получит вид (,..,,n) Линейную аппроксимацию механической характеристики двигателя можно осуществить , по формуле , /ILDiLCax ;Id y/dx2l max где L. ; - длина участка аппроксимации; дПу - ошибкалинейного иитер238полирования, у - аппроксимируемая функция. Произведен расчет. Получено, что при 10%-ной ошибке интерполирования число интервалов равно 5, а при 5%-ной -г равно 7. По численному решению систем уравнений (25) и (26) Для различных условий бурения получены синтезирующие функции, по которым должно быть построено управление, Для выбора управляющего параметра и воспользуемся релейным элементомГде Е- координата, поступающая на вход блока управления. Так как для реализации оптимального управления необходимо измерять текугцие значения х и у, то используем отрицательную обратную связь по у X,f(y), где х - значение X, полученное из тех фазовых траекторий, на которых происходит смена знака управляющего параметра. Значение функции х, ч(у) может быть получено по результатам расчета синтезируюш.ей функции. Реализация оптимального управления позволяет сделать вывод о том, что только такое управление обеспечит максимальное быстродейсвие системе и, следовательно, снижение динамических нагрузок в колонне бурильных труб. Таким образом, у данного решеия появляется новое по сравнению известными свойство, обусловленное ыбором момента смены знака управяющего параметра, доставляющего инимум времени переходного процеса и обеспечивающего, в результате того, снижение динамических нагруок путем гашения знергии вращающихя масс злектромагнитньм моментом вигателя. На фиг. 1 приведена блок-схема стройства для защиты бурильной коонны от обрывов и скручиваний. Схема содержит бурильную колону 1, привод 2 бурильной колонны, лок 3 управления, датчик 4 частоты ращения, датчик 5 крутящего момена, блок 6 отключения управления.
9
нелинейный элемент 7, переключающий элемент 8, первый 9 и второй 10 элементы сравнения, задающий блок 11, Нелинейный элемент 7 предназначен для моделирования зависимости Xt
f(y).
Устройство работает следующим образом.
Перед началом бурения на вход задающего блока 11 подают сигналы, пропорциональные глубине скважины , жесткости С колонны, используемой при бурении, и коэффициенту редукции Кр коробки передачи привода бурильной колонны 2, если используется нерегулируемый привод. С выхода задающего блока 11 по одному каналу сигнал поступает на первый вход нелинейного элемента 7. Этот блок осуществляет моделирование синтезирующей функции с учетом входных сигналов задающего блока П. С выхода последнего по другому каналу сигнал поступает на вход датчика 5 крутящего момента, осуществляя тем самым приведение крутящего момента на бурильной колонне 1 к валу двигателя, В зависимости от величины износа колонны бурильных труб на второй вход первого элемента 9 сравнения с задатчика допустимого крутящего момента (на фиг, 1 не показан) подают сигнал, пропорциональный допустимому углу закрутки бурильной колонны который пропорционален допустимому крутящему моменту,
При бурении сигнал с выхода датчика 4 частоты вращения бурильной колонны, преобразованный в относительные единицы, подается на второй вход блока 6 отключения управления на второй вход нелинейного элемента 7. С выхода датчика 5 крутящего момента сигнал поступает на первый вход блока 6 отключения управления и на первый вход первого элемента 9 сравнения. Если текущее значение крутящего момента превысило допустимое значение () , то на вывыходе первогоэлемента 9 сравнения появляется сигнал дх, который поступает на первый вход переключающего элемента 8, подключая тем самым выход датчика 5 крутящего момента к первому входу второго элемента 10 сравнения,. На выходе второго элемента 10 сравнения появляется сигнал - (х+х, ), который поступает на
6382310
первый вход блока 3 управления, на выход которого управляющий параметр и изменяется в соответствии с выражением (27). Переключение управля5 ющего параметра U осуществляется в соответствии с неравенствами |х, ( , lX(,U I -1, |х,| 1x1 . В процессе управления торможением происходит
10 уменьшение величины крутящего момента Мгх и частоты вращения бурового рнаряда . При достижении значений хсбх и с выхода блока 6 отключения управления на второй
15 вход блока 3 управления поступает сигнал, снимающий управление U с привода бурильной колонны 2,
Произведен расчет синтезирующей функции и осуществлено оптимальное
20 управления процессом торможения. На фиг, 2 показаны фазовые траектории и синтезирующая функция при бурении скважины глубиной 500 ми, станком ЗИФ-650 М при частоте вра25 щения бурового снаряда 460 минЧ Фазовая траектория 12 соответствует управлению, при допустимом крутящем моменте на бурильной колонне, равном 0,6 кН-м, а фазовая траектория
30 13 - равном 1,2 кН м.
Синтезирующая функция (фиг, 2) MONL строится с использованием метода обратного времени, при этом правый конец траектории становится
, свободным, что снимает необходимость в конечных граничных условиях. Участки синтезирующей функции МП или ON ведущие в начало координат построены с использованием тех участп ков механических характеристик электродвигателя, по которым осуществляется переход от режима противовключения в двигательный режим.; Другие участи синтезирующей функции, не ведущие, в начало координат, например NL (фиг. 2), построены с использованием формул преобразования координат дуг, например дуги ON в дугу NL
, 6ivltl. ..
(28) е х: ,
У 1 У:ее.У;;
где - номер дуги; х - конечное значение- координаты х дуги ON,
В данном случае кусочно-непрерывная синтезирующая функция, обеспечивающая оптимальное управление данным объектом, с учетом упругих связей и сил трения, имеет вид
15
нию составного транзистора 50 и 51 импульсами от трансформатора 52 и к разряду накопительнойемкости 53 на управляющие электроды семисторов 5А-57, После отпирания семистора 54 он шунтирует первичную цепь трансформатора 52 и снимает сигнал с транзисторов 50 и 51.
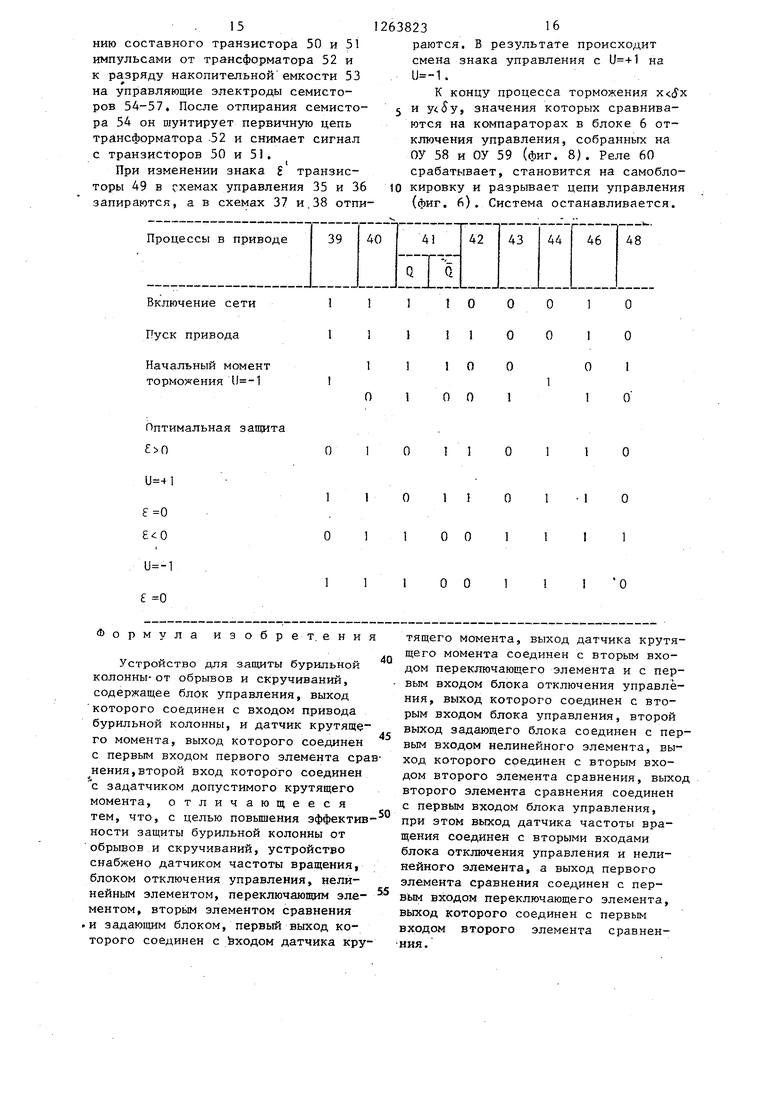
При изменении знака транзисторы 49 в схемах управления 35 и 36 запираются, а в схемах 37 и.38 отпиОптимальная защита 0 110 11 О 1-1 1110011 Формула изобрет. ени Устройство для защиты бурильной колонны-от обрывов и скручиваний, содержащее блок управления, выход которого соединен с входом привода бурильной колонны, и датчик крутящего момента, выход которого соединен с первым входом первого элемента сра нения,второй вход которого соединен с задатчиком допустимого крутящего момента, отличающееся тем, что, с целью повышения эффектив ности защиты бурильной колонны от обрывов и скручиваний, устройство снабжено датчиком частоты вращения, блоком отключения управления, нелинейным элементом, переключающим элементом, вторым элементом сравнения и задающим блоком, первый выход которого соединен с йходом датчика кру
26382316
раются. В результате происходит смена знака управления с на
.
К концу процесса торможения х(Ух 5 и , значения которых сравниваются на компараторах в блоке 6 отключения управления, собранных на ОУ 58 и ОУ 59 (фиг. 8). Реле 60 срабатывает, становится на самобло10 кировку и разрывает цепи управления (фиг. б). Система останавливается.
О 1 О 11 О 100111 О 1 тящего момента, выход датчика крутящего момента соединен с вторым входом переключающего элемента и с первым входом блока отключения управления, выход которого соединен с вторым входом блока управления, второй выход задающего блока соединен с первым входом нелинейного элемента, выход которого соединен с вторым входом второго элемента сравнения, выход второго элемента сравнения соединен с первым входом блока управления, при этом выход датчика частоты вращения соединен с вторыми входами блока отключения управления и нелинейного элемента, а выход первого элемента сравнения соединен с первым входом переключающего элемента, выход которого соединен с первым вход(Ж второго элемента сравненния.
Фиг. 2
0
.Пуск
0
5S
±
47 zzJ
ifl
r
-Tj-CZb:
.Щ ш ш/
г/г/
-0
,2 .J J/TAJJ |&/ ,t
-0+%
i/J A,J
КШ
| Патент США № 3703096, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Айрапетов В.А., Андрианов В.Р. | |||
| Верешейкин Б.Я, и др | |||
| Контроль параметров процесса бурения | |||
| М.: Недра, 1973, с | |||
| Сепаратор-центрофуга с периодическим выпуском продуктов | 1922 |
|
SU128A1 |
| , | |||
