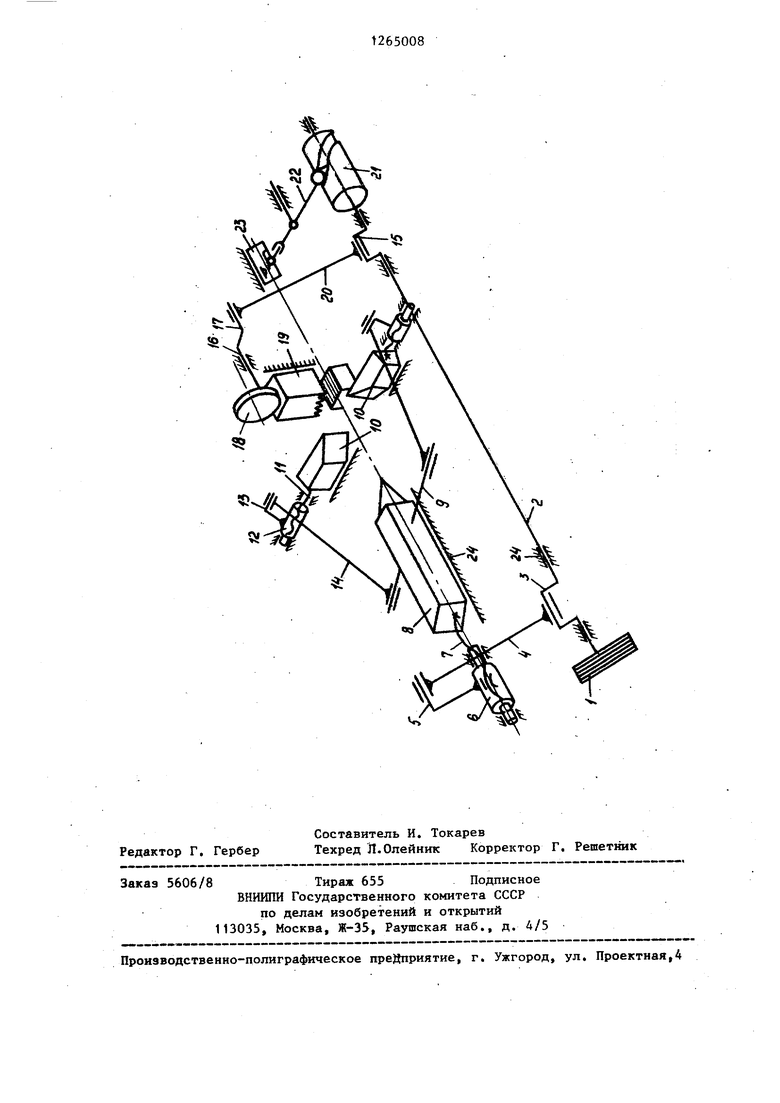
Изобретение относится к куэнечно-пресеовым машинам, в частности к оборудованию для изготовления гвоздей. Целью изобретения является улуч шение условий техники безопасности путем снижения уровня шума за счет разгрузки подшипниковых опор от технологических сил. На чертеже показана кинематичес кая схема автомата для изготовлени гвоздей. Автомат состоит из шкива 1, свя занного посредством клиноременной передачи с двигателем (не показан) приводного двухколенчатого вала 2, расположенного параллельно оси высадки. Одно колено 3 вала 2 переда ет движение на механизм высадки. Йля этого колено 3 соединено шатуном 4 с рычагом 5, жестко закрепленным нд гайке 6 сочлененной 0 винтом 7, жестко закрепленным на оси ползуна 8. йа ползуне 8 смонтирована поперечина 9 передающая движение на механизм резки, выполненный в виде двух ножей tO, сорсно закрепленных на этюс ножах винтов 11, сочлененных с винтами 11 с рычагами 13 и тяг 14,свя зывагацих рычаги 13с поперечиной 9 От другого колена 15 двухколенчатого вала 2 получает движение пр вод механизма зажима, выполненный в Виде закрепленного на валу 16 с кривояшпом. 17 эксцентрика 18,в з аи082модействующего с подвижной матрицей 19а Кривошип 17 соединен с коленом 15 шатуном 20. Кулачок 21 посредством телескопического рычага 22 связан с кареткой 23 подачи проволоки. Станина 24 показана условно. Автомат работает следзгклцим образом. Вал 2 через шатун 4 сообщает качательное движение гайке 6, в которой винт 7 совершает возвратнопоступательное движение, заставляя перемещаться ползун 8. Ножи 10 приводятся в движение через поперечину 9, тяги 14, рычаги 13 и гайки 12 с винтом 11, Зажимйая матрица 19 приводится в движение от другого колена 15 приводного вала 2 посредством шатуна 20 кривошипа 17 и эксцентрика 18. Подача проволоки осуществляется кареткой 23, связанной посредством телескопического рычага 22 с кулачком 21, вращающемся на валу 2. При зтом технологическая нагрузка, действующая на ползун 8, передается через винт 7 на гайку 6, замыкающую усилие на станине 24, а шарнирные соединения шатуна 4 разгружены. Следовательно, износ подшипников незначителен, что уменьшает шум автомата благодаря отсутствию повышенных зазоров и, таким образом, улучшает условия техники безопасности.
S3
-f
| название | год | авторы | номер документа |
|---|---|---|---|
| Гвоздильный автомат | 1978 |
|
SU751486A1 |
| Автомат для изготовления гвоздей из проволоки | 1978 |
|
SU766717A1 |
| Гвоздильный автомат | 1980 |
|
SU971552A1 |
| Гвоздильный автомат | 1975 |
|
SU512843A1 |
| Проволочно-гвоздильный автомат | 1977 |
|
SU766716A1 |
| АВТОМАТ ПРОВОЛОЧНО-ГВОЗДИЛЬНЫЙ | 1974 |
|
SU376989A1 |
| Одноударный автомат для высадки гвоздей | 1982 |
|
SU1050793A1 |
| Автомат для изготовления гвоздей | 1979 |
|
SU1039625A1 |
| Автомат для изготовления гвоздей | 1975 |
|
SU742013A1 |
| ГВОЗДИЛЬНЫЙ АВТОМАТ | 1971 |
|
SU435889A1 |
АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ГВОЗДЕЙ, содержащий размвбщенные на станине приводной вал и кинематически связанные с ним механизмы высадки с ползуном, отрезки с двумя ножами, зажима с подвижной матрицей и подачи, отличающийся тем, что, с целью улучшения условий техники безопасности путем снижения уровня шума за счёт разгрузки подвшпниковых опор от технологических сил, приводной вал выполнен двухколенчатым, механизм высадки выполнен в виде жестко закрепленного на оси ползуна винта, сочлененной с ним гайки с рычагом и шатуна соединения упомянутого рычага с одним коленом приводного вала, механизм отрезки выполнен в виде соосно закрепленных на соотйетствуючих ножах винтов сочлененных с последними гаек с рычагами, тяг и поперечины, механизм зажима выполнен в виде закрепленного на валу с кривошипом эксцентрика, смонтированного в станине с возможностью взаимодействия с подвижной матрицей, и яштуна соединения кривошипа с другим коленом приводного вала, при этом поперечина смонтирована в ползуне, рычаги связаны с поперечиной посредством тяг, а приводной вал. расположен параллельно оси высадки.
| Автомат для изготовления гвоздей | 1979 |
|
SU1039625A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
