1
Изобретение относится к .оборудованию кузнечно-прессовотх производства.
Известен подвесной манипулятор, содержащий полый корпус в виде трубы с установленными на нем захватными рычагами и размещенной в нем шангой, CBS занной с захватными рычагами, силовой цилиндр, жестко связанный с корпусом, рукоятку управления, смонтиуюванную на корпусе, пульт управления, а также обойму, охватывающую корпус, установленную на подшипниковых опорах и связанную с узлом подвеса корпуса р. .
Недостаток известного манипулятора . сострит в невысоком удобстве обслуживания, что обусловлено отсутствием во; можности уравновешивания манипулятора в процессе его работы.
Цель - повьшение удобства обслуживания манипулятора за счет обеспечения возможности уравновешивания его в процессе работы.
Цель достигается тем, что манипулжн тор снабжен втулкой, установленной на
корпусе с возможностью перемещения относительно него и связанной со штангой и шарнирно с захватными рычагами, а Поршень со штоком силового цилиндра выполнены полыми и установлены на корпусе манипулятора, при этом обойма установлена и зафиксирювана от осевого смещения на штоке с возможностью взаимодействия со втулкой, штанга подпружинена относительно корпуса, рукоятка управл.
10 ния смонтирована на корпусе посредством телескопического соединения и подпружинена относительно него, а пульт управления расположен на рукоятке упра&ления.
15
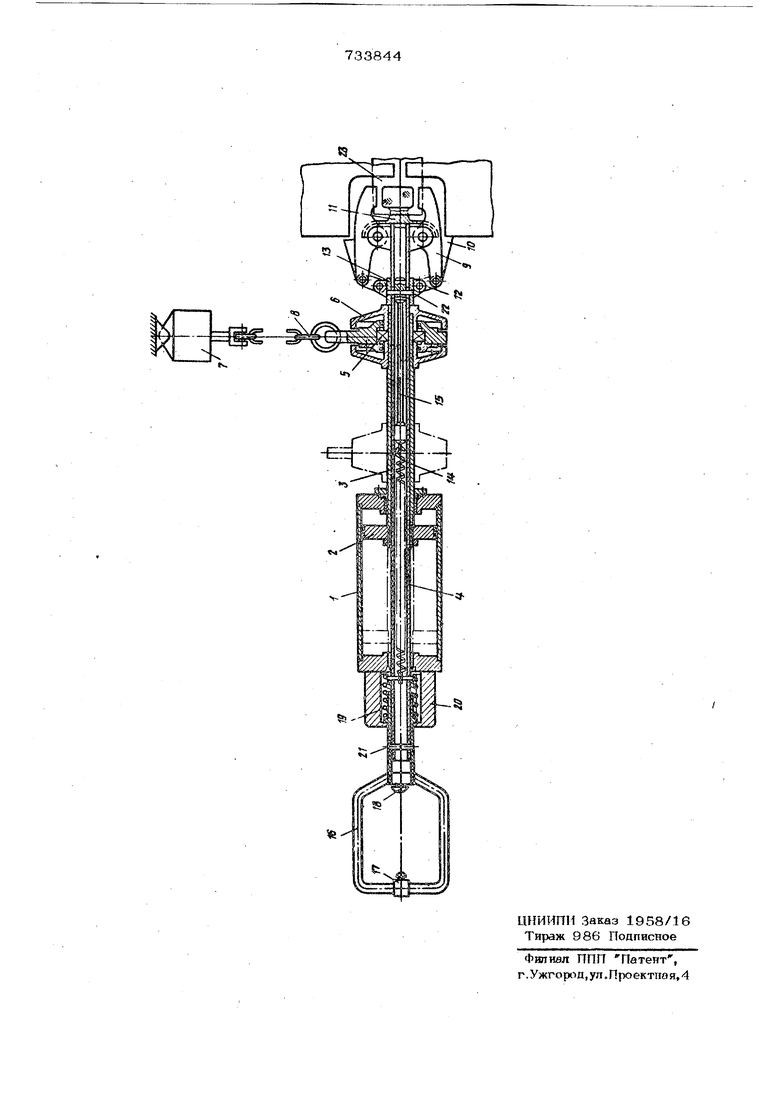
На чертеже показан предлагаемый подвесной манипулятор, разрез.
Силовой ЦИЛИНДР 1 с поршнем 2 и штоком 3 смонтирован на полом корпусе 4. На штоке установлен механизм уравнове 20шивания, который выполнен в виде подшипниковой опоры качения 5, смонтированной в обойме 6 и соединенной с цилиндром подъема 7 с помощью цепи В. 373 На конце полого корпуса 4 смонтированы шарнирно-зажимные губки 9, имею- щие ограничительные упоры 1О, предна значенные для ограничения подачи заготовки в зону штампа; элемент 11, предохраняющий механизмы от нагрева и определяющий шшну сжимаемой части заготовки. Зажимные губки соединены с помощью рычагов 12 со втулкой 13, насаженной на корпус 4 с возможностью перемещения вдоль оси. Втулка соединена с пневмоцилиндром пружиной. 14 и штан гой 15, На противоположном конце корпуса 4 установлена рукоятка управления 16 с Возможностью перемещения вдоль оси с вмонтированными в ней кнопками управле ния 17 и 18, Рукоятка управления подпружинена пружинойсжатия 1.9, смонтированной в полой части груза 2О, Пальцы 21 и 22 предохраняют вг ащение рукоятки управления 16 и втулки 13 относительно корпуса 4, В исходном положении сжатьШ воздух подан в штоковую полость пневмоцилиндра 1, щток 3, обхватывающий корпус 4 несущий механизм уравновещивания вьшо ненный в виде подщипниковой опоры, зам нутой в кожухе, втянут в полость цилиндра-. Втулка 13 под действием нружины 14 находится в крайнем левом положени зажимные губки раскрыты. При этом корпус 4 со смонтированньм на нем цилиндром, захватным органом и рукояткой управления уравновешен; точка подвески подшипниковой опоры 5 находится близко к центру тяжести. Система находится в равновесии. Захватной орган подводят к заготовке до соприкосновения с эпементом 11, вь полншощим роль ограничителя. Сжатый воздух по команде с помощью кнопки управления 18 поступает в бесщтоковую полость цилиндра 1, штоковая полость соединяется с атмосферой. При этом шток 3, несущий подшипниковую опору, смонтированную в обойме 6 и подвещен- ную на цепи, перемещается к центру тяжести корпуса 4, несущего на себе силовой диликдр 1 , рукоятку управления 16 и захватный орган с заготовкой 23 и, контактируя со втулкой 13, перемешает ее вправо, зажимая заготовку. Система находится в равновесии. Таким образом, процесс уравновеш Емания производится автоматически и синхронно с работой захватного органа, что ок15ащает время и исключает подъем неуравновешенного корпуса. Подъем заготовки 23 осуществляется цилиндра 7, управляемого кнопкой управления 17 или за счет наклона корпуса 4 относительно горизонтали. Затем захватный орган с зажатой заготовкой подводят к штампу. Подача заготовки в зону щтамповки определяется ограничительными упорами 10, обеспечивающими постоянный объем неформируемой части заготовки и предохраняет от попадания захватного органа в зону падающих частей молота. Усилие на рукоятке управления 16 от деформации металла при штамповке смягчается пружиной 19, что делает рукоятку безопасной для рабочего. Облегчение поворота вокруг продольной оси корпуса 4 обеспечивается подшипниковой опорой 5 на 36О . В связи с тем, что процесс уравновешивания осуществляется автоматически и синхронно с работой захватного органа, мобильность конструкции обеспечивает маневренность манипулятора, время на вспомогательные операции при штамповке уменьщается в несколько раз, что соот ветственно увеличивает производительность манипулятора и делает его пригодным для штамповки деталей на молотах в серийном производстве. Синхронизация процесса уравновещива- ния с работой захватного органа ИСКЛЕОчает возможность манипулировать с неу- равновешенньвл манипулятором и обеспечивает большую надежность уравновешивания, причем прилипание заготовки к падающей части молота не нарушает равновесие. Усилие на рукоятке управления, возникающее от тяжести, всегда остается в пределах расчетного. Усилие, возникающее от деформации металла, на рукоятку управления не передаетея,так как гасится пружиной. Формула изобретения Подвесной манипулятор, содержащий полый корпус в виде трубы с установленными на нем захватными рычагами и размещенной в нем штангой, связанной с захватными рычагами, силовой цилиндр, жестко связанный с корпусом, рукоятку управления, смонтированную на корпусе, пульт управления, а такмсе обойму, охва-
тывающую корпус, устаноштонную на подшипниковых опорах и спя:-анную с узлом подвеса корпуса, отличающийс я тем, что, с целью повьпления удобства обслуживания за счет обеспечения воаможности уравновешивания манипулятора в процессе его работы, он снабжен втулкой, установленной на корпусе с возможностью перемещения относительно него и связанной со штангой и шарннрно с захватными рычагами, а поршень со штоком силового цилиндра выполнены полыми и .установлены на корпусе манипулятора.
при этом обойма установлена и зафиксирована от осевого смещения на штоке с возможностью взаимодействия со втулкой, штанга подпружинена относительно корпуса, рукоятка управления смонтирована на корпусе посредством телескопического соединения и подпружинена относительно него, а пульт управления расположён на рукоятке управления.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР. № 350559, кл. В 21 Т 13/10, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулирующее устройство к кузнечно-прессовому оборудованию | 1983 |
|
SU1234033A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Ручной кантователь | 1982 |
|
SU1026921A1 |
| Устройство для гибки обечаек из листовых заготовок | 1985 |
|
SU1269881A2 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Клещевая головка ковочного манипулятора | 1982 |
|
SU1055583A1 |
| ПОДВЕСНОЙ КОВОЧНЫЙ МАНИПУЛЯ'. «сесоюзиля bAiEluH^-::U-:^ .I^.,,^- .-.,;, -.-,V <-, \'Ю^^,..^!^^^- ' ' | 1972 |
|
SU350559A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Устройство для гибки обечаек из листовых заготовок | 1982 |
|
SU1061883A2 |
| Манипулятор | 1980 |
|
SU869931A1 |