Изобретение относится к транспортным устройствам для переноса подвесок с деталями в гальванических линиях.
Цель изобретения - повышение надежности работы устройства.
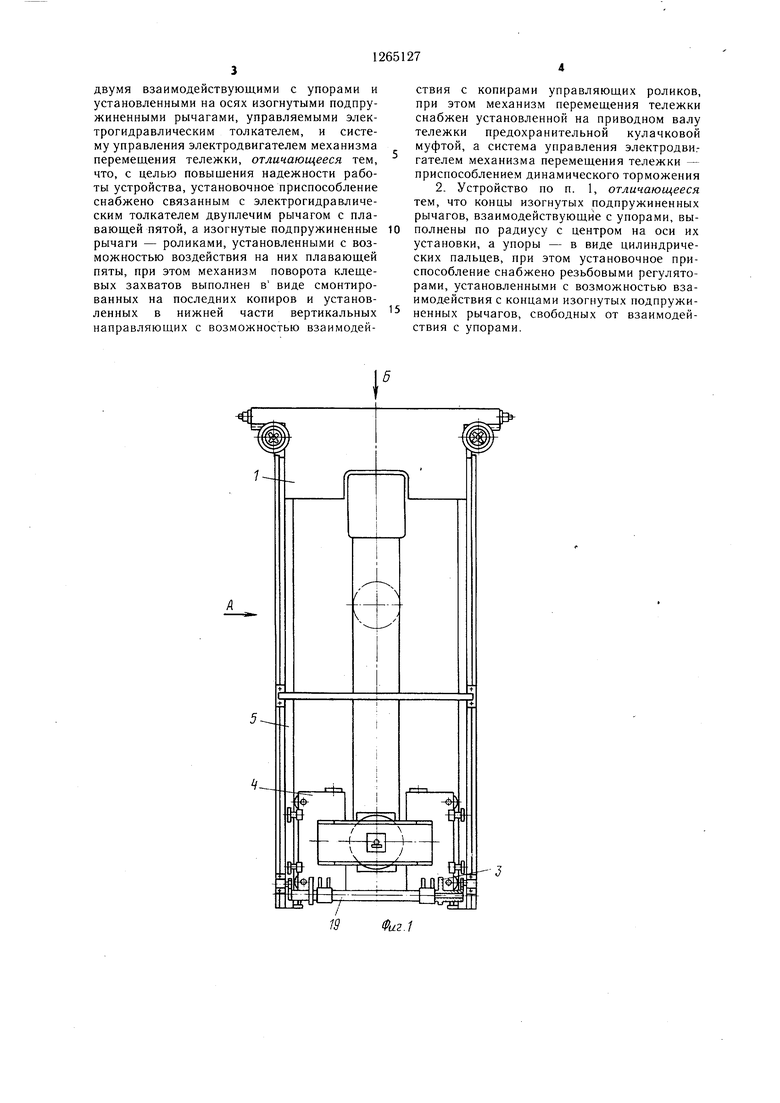
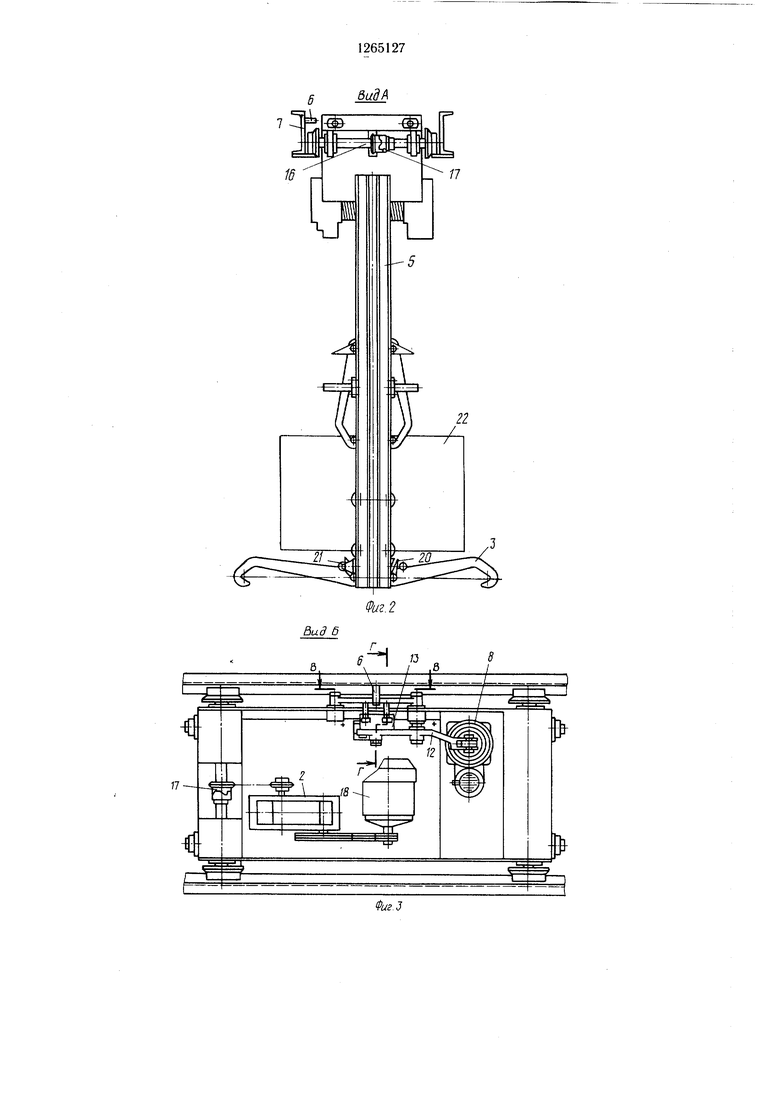
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - разрез Г-Г на фиг. 3; на фиг. 6 и 7 - схема управления и динамического торможения электродвигателя соответственно.
Устройство содержит подвижную тележку 1 с механизмом 2 перемещения, клещевые захваты 3 на подъемной каретке 4, которая имеет возможность перемещаться по вертикальным направляющим 5, упоры 6, закрепленные на путях тележки 7, и установочное приспособление 8, состоящее из изогнутых подпружиненных рычагов 9 электрогидравлического толкателя 10, щтока 11 двуплечего рычага 12 с плавающей пятой
13. Концы изогнутых рычагов 9, взаимодействующие с упором б, оснащены роликами 14 и выполнены по радиусу с центром на оси поворота рычагов, а упоры - в виде цилиндрических пальцев. Положение изогнутых рычагов относительно упора устанавливается резьбовыми регуляторами 15. на приводном валу 16 смонтирована предохранительная муфта 17. Система управления электродвигателя 18 механизма перемещения оснащена динамическим торможением. Клещевые захваты 3 установлены свободно на осях 19, закрепленных на подъемной каретке, и имеют копиры 20, которые взаимодействуют с управляющими роликами 21, смонтированными на вертикальных направляющих 5.
Автооператор транспортирует груз в подвеске 22.
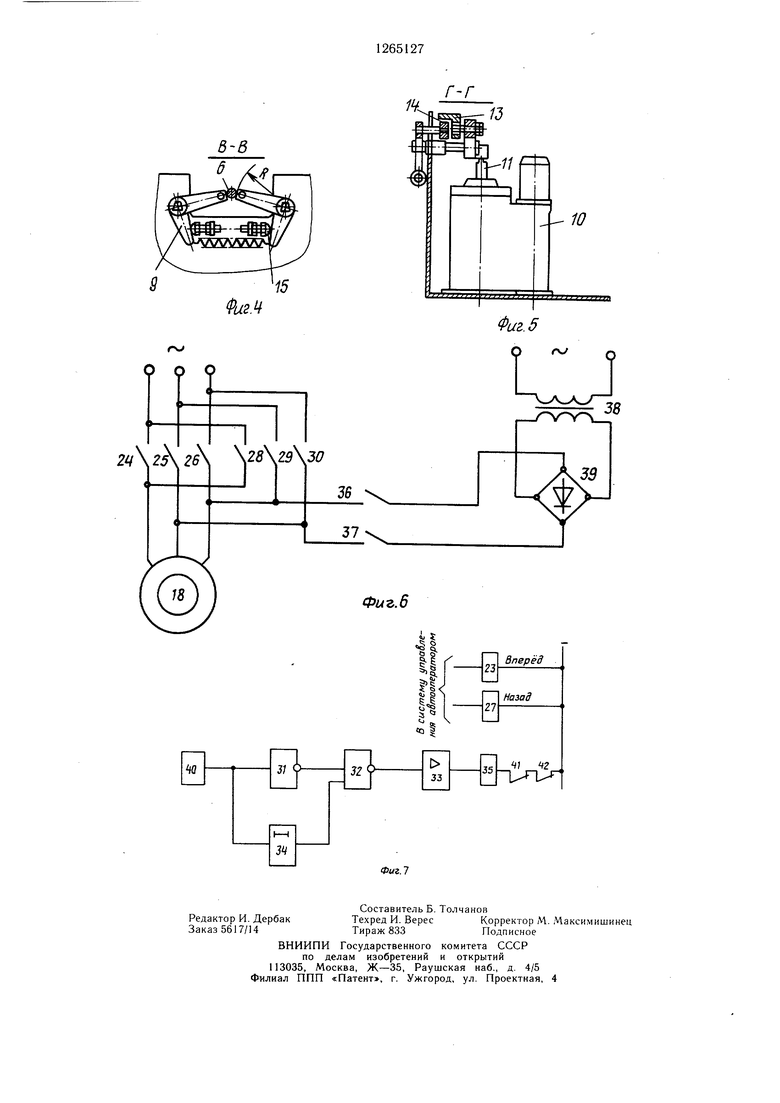
Схема управления и динамического торможения электродвигателя 18 состоит из пускателя 23 «Вперед с контактами 24-26, пускателя 27 «Назад с контактами 28- 30 элементов ИЛИ-НЕ 31 и 32, усилителя 33, элемента ЗАДЕРЖКА 34, реле 35 с контактами 36 и 37, трансформатора 38, диодного моста 39 и датчика 40 положения автооператора на позиции и контактов 41 и 42.
Устройство работает следующим образом.
При перемещении подъемной каретки 4 вверх клещевые захваты 3, поворачиваясь относительно осей 19 и обкатываясь копирами 20 относительно управляющих роликов 21, опускаются из горизонтального положения вниз, захватывая подвеску 22 за цапфы. В верхнем положении подвески включается электрогидравлический толкатель 10, щток 11 которого, поднимаясь, воздействует на двуплечий рычаг 12. Последний, поворачиваясь, нажимает плавающей пятой 13 на ролики 14,. При этом изогнутые рычаги 9 легко освобождаются от упора 6,
СКОЛЬЗЯ радиусными поверхностями по цилиндрической поверхности упора. Включается электродвигатель 18 механизма 2 перемещения, и автооператор перемещается к следующей позиции, при подходе к которой за несколько секунд отключается электрогидравлический толкатель 10.
Шток 11 и изогнутые рычаги 9 под действием пружины возвращаются в исходное положение. При этом один из изогнутых рычагов по ходу движения автооператора наезжает на упор,6 и, скользя под ним, утапливается до того момента, пока второй изогнутый рычаг не упирается в упор 6, после чего первый по ходу рычаг снова возвращается под действием пружины в исходное положение. Изогнутые рычаги, охватывая упор 6 с двух сторон, точно устанавливают автооператор на рабочей позиции. Перед тем, как второй изогнутый рычаг упрется в упор 6, включается динамическое торможение в системе управления электродвигателя 18. При этом сигнал от датчика 40 положения автооператора на позиции отключает пускатели «Вперед 23 или «Назад 27, размыкаются контакты 24-26 или 28-30, обесточивается электродвигатель.
В то же время замыкается контакт 41. Одновременно сигнал поступает на входы элементов ИЛИ-Н Е 31 и ЗАДЕРЖКА 34. Инвентированный дважды элементами 31 и 32 сигнал поступает на вход усилителя 33, посредством которого через контакты 41 и 42 включается реле 35. При этом замыкаются контакты 26, 27 и на две фазы статора электродвигателя подается постоянное напряжение, полученное посредством трансформатора 38 и диодного моста 39. Ротор электродвигателя, вращающийся по инерции после отключения nepeMeHHoijo тока, начинает тормозиться в постоянном электромагнитном поле статора. По окончании выдержки времени, обусловленной элементом 34, с последнего на второй вход элемента 32 поступает сигнал, запрещающий прохождение основного сигнала от датчика 40 положения автооператора к реле 35, которое, отключаясь, размыкает контакты 36 и 37, торможение электродвигателя заканчивается.
Скорость и плавность торможения определяются временем выдержки и величиной напряжения постоянного тока.
Формула изобретения
1. Устройство для транспортирования грузов, включающее автооператор в виде тележки с приводным валом и с механизмом перемещения по путям, на которых смонтированы упоры, установленные на осях подъемной в вертикальных направляющих каретки, клещевые захваты с механизмом их поворота, установочное приспособление с двумя взаимодействующими с упорами и установленными на осях изогнутыми подпружиненными рычагами, управляемыми электрогидравлическим толкателем, и систему управления электродвигателем механизма перемещения тележки, отличающееся тем, что, с целью повыщения надежности работы устройства, установочное приспособление снабжено связанным с электрогидравлическим толкателем двуплечим рычагом с плавающей пятой, а изогнутые подпружиненные рычаги - роликами, установленными с возможностью воздействия на них плавающей пяты, при этом механизм поворота клещевых захватов выполнен в виде смонтированных на последних копиров и установленных в нижней части вертикальных направляющих с возможностью взаимодействия с копирами управляющих роликов, при этом механизм перемещения тележки снабжен установленной на приводном валу тележки предохранительной кулачковой муфтой, а система управления электродви.гателем механизма перемещения тележки - приспособлением динамического торможения 2. Устройство по п. 1, отличающееся тем, что концы изогнутых подпружиненных рычагов, взаимодействующие с упорами, выполнены по радиусу с центром на оси их установки, а упоры - в виде цилиндрических пальцев, при этом установочное приспособление снабжено резьбовыми регуляторами, установленными с возможностью взаимодействия с концами изогнутых подпружиненных рычагов, свободных от взаимодействия с упорами.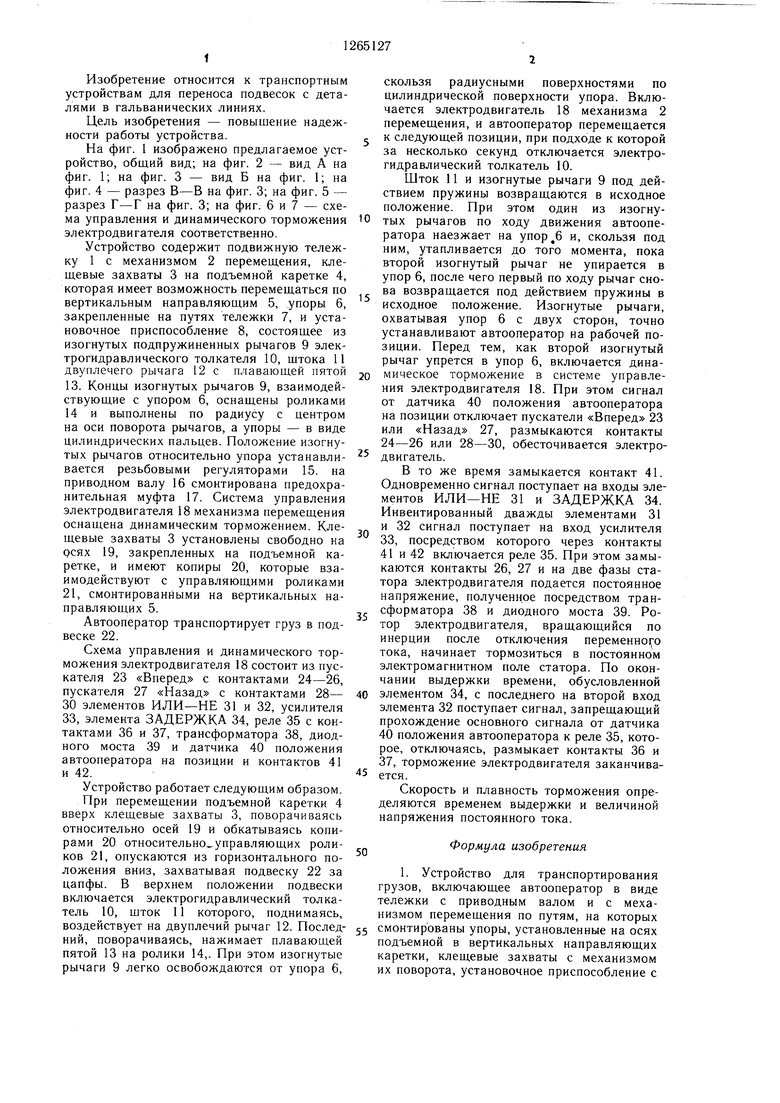
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопильный станок для продольной распиловки короткомерных бревен | 1982 |
|
SU1066804A1 |
| Установка для нанесения покрытий | 1983 |
|
SU1142386A2 |
| Устройство для перегрузки конусов электронно-лучевых трубок с транспортера печи отжига | 1990 |
|
SU1839168A1 |
| УСТРОЙСТВО для ЗАХВАТА И ТРАНСПОРТИРОВКИ ГРУЗОВ | 1967 |
|
SU198599A1 |
| УСТРОЙСТВО для НАВЕШИВАНИЯ ПОДВЕСОк] | 1966 |
|
SU188903A1 |
| Устройство для навешивания изделий на подвесной конвейер | 1986 |
|
SU1313778A1 |
| Устройство для перемещения тележек | 1979 |
|
SU816834A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Автомат для навивки пружин | 1979 |
|
SU860922A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
Изобретение относится к транспортным устройствам для переноса подвесок с деталями в гальванических линиях и позволяет повысить надежность работы устройства. Автооператор (АО) устройства содержит тележку, на путях которой смонтированы упоры, установленные на осях подъемной по вертикальным направляющим каретки с клещевыми захватами (КЗ). Установочное приспобление с двумя изогнутыми подпружиненными рычагами (ИПР) снабжено двуплечим рычагом с плавающей пятой. При перемещении каретки вверх КЗ, поворачи-ваясь, опускаются и захватывают подвеску. Механизм поворота КЗ выполнен Б виде смонтированных на КЗ копирах и взаимодействующих с ними управляемых роликов, смонтированных в нижней части направляющих. В верхнем положении подвески включается электрогидравлический толкатель. Его щток воздействует на двуплечий рычаг, который, поворачиваясь, плавающей пятой нажимает на ролики, смонтированные на ИПР. При этом ИПР легко освобождаются от упоров, т.к. концы ИПР, взаимодействующие с упорами, выполнены по радиусу с центром на оси, их установки а упоры - в виде цилиндричиеских па1льцев. Включается электродвигатель механизма перемещения тележки и АО перемещается к следующей позиции. При подходе к ней толкатель отключается ИПР возвращаются в исходное положение, охватывая упор с двух сторон. Система управления электродвигателем снабжена приспособ(Л лением динамического торможения. Это обеспечивает плавное торможение АО при установке на упор. Кроме того, механизм перемещения тележки снабжен установленной на приводном валу тележки предохранительной муфтой. А установочное приспособление снабжено резьбовыми регуляторами, установленными с возможностью взаимодействия с концами ИПР, свободных от 1C взаимодействия с упорами. I з.п. ф-лы, 7 ил. О5 сд ьо 
ёидА
14
ФигМ
Фиг. 5
Фиг. 6
| ПОДВЕСНОЙ ГАЛЬВАНИЧЕСКИЙ АВТООПЕРАТОР | 0 |
|
SU185174A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| УСТРОЙСТВО для ЗАХВАТА И ТРАНСПОРТИРОВКИ ГРУЗОВ | 0 |
|
SU198599A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
