Изобретение относится к подвесным автооператорам, предназначенным для автоматизации технологического процесса нанесения гальванических покрытий в автоматических мпогонроцессных линиях.
Известны нодвесные гальванические автоонераторы, состоящие из механизмов перемещения и подъема, фиксирующего устройства п захватного органа.
Для обеспечения точной фиксации автооператора над рабочей позицией установлено фиксирующее устройство, выполнепное в виде жестко укренленной на монорельсе направляющей планки с поперечными вырезами и скользящей по ее поверхности защелки, взаимодействующей с электромагнитом и входящей в вырезы планки при остановке автооператора.
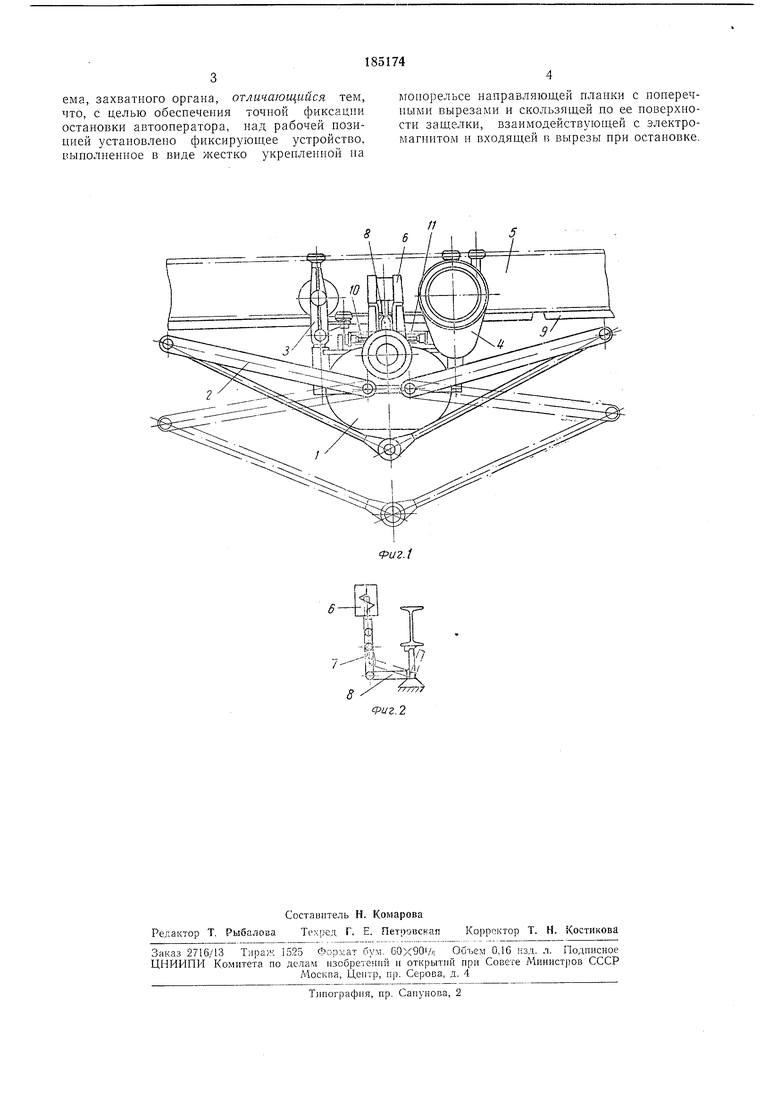
На фиг. 1 изобрал ен общий вид автооператора; на фиг. 2 - фиксирующее устройство.
Автооператор содержит корпус 1, в котором размещен привод механизма подъема. К корпусу крепится рычажная система 2 с закрепленной на ее конце захватной щтангой. Корпус с холостой кареткой 3 и нриводной кареткой 4 висит на монорельсе 5. В верхней части корпуса смонтировано фиксирующее устройство. Оно состоит из электромагнита 6, который через серьгу 7 поворачивает защелку 8, входящую в вырезы планки 9, укренленной на
монорельсе. Защелка сидит на оси W, по которой она может перемещаться, и удерживается на ней пружинами П.
По команде с пульта унравления включается механизм перемещения и автооператор движется к заданной рабочей позиции. Подойдя к ней, он упором нажимает на конечный выключатель, расположенный иа каждой рабочей позиции. При этом выключается двигатель механизма перемещения и включается электромагнит фиксирующего устройства. Защелка нрижимается к планке и скользит по ней до тех пор, пока не западет в ее вырез, в результате этого автооператор останавливается. Остаточная кинетическая энергия автооператора гасится пружинами Л, которые сжимает защелка, перемещаясь по оси. Прп подаче с пульта управления следующей команды приходит в движение рычажная система. После того как технологические операции на заданной рабочей позиции выполнены, автооператор получает комапду на перемещение к следующей позиции. При этом электромагнит включается одновременно с двигателем механизма перемещения, а защелка выводится из выреза планки.
ема, захватного органа, отличающийся тем, что, с целью обеспечения точной фиксацни остановки автооператора, над рабочей позицией установлено фиксирующее устройство, выполненное в виде жестко укрепленной па
монорельсе направляющей планки с поперечными вырезами п скользящей по ее поверхности защелки, взаимодействующей с электромагпптом и входящей в вырезы при остановке.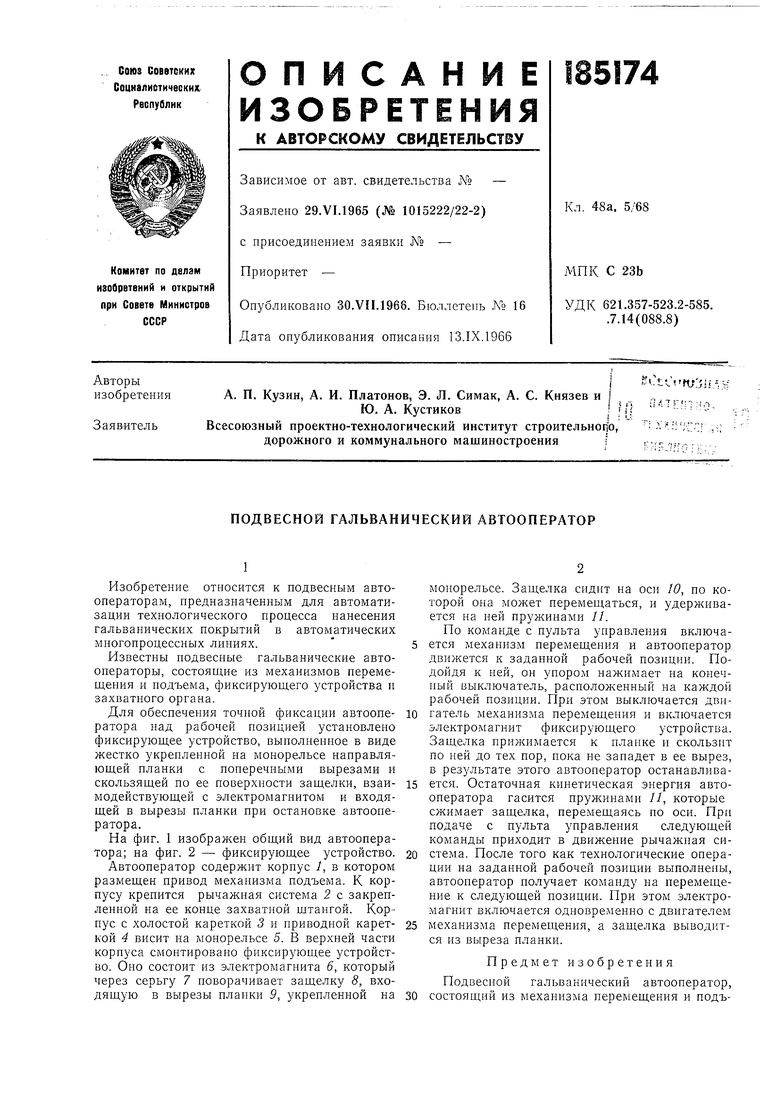
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВЕСНОЕ ЗАХВАТНОЕ УСТРОЙСТВО АВТООПЕРАТОРА ЛИНИИ ФОСФАТИРОВАНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1973 |
|
SU383675A1 |
| Автоматическая линия для нанесения гальванических покрытий | 1980 |
|
SU933822A1 |
| Автооператор для гальванических ли-ний | 1973 |
|
SU509665A1 |
| Автооператор для гальванических линий | 1988 |
|
SU1581784A1 |
| Автоматическая линия для нанесения гальванических покрытий | 1989 |
|
SU1696612A1 |
| Гальваническая автооператорная линия для обработки мелких деталей | 1981 |
|
SU986972A1 |
| СТРОИТЕЛЬНЫЙ ПОДЪЕЛЬНИК | 1971 |
|
SU302304A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| Автооператор | 1976 |
|
SU554993A1 |
| Манипулятор для кантования корпусных деталей | 1990 |
|
SU1750941A1 |