Изобретение относится к грузозахватным устройствам и может быть использовано при создании различных манипуляторов в машиностроении, в частности в листоштамповочном производстве для подачи деталей в зону штампа.
Известен схват, содержащий корпус, захватные рычаги с губками и механизм привода 1 .
Недостаток известного схвата заключается в узких технологических возможностях, заключающихся в невозможности удержания детали при принудительном перемещении ее в плоскости, перпендикулярной к плоскости, проходящей между губками.
Цель изобретения - расширение технологических возможностей за счет удержания детали во время ее обработки.
Цель достигается тем, что схват, содержащий корпус, захватные рычаги с губками и механизм привода, снабжен шариирно закрепленным на корпусе угловым рычагом, на плечах которого шарнирно размещены захватные рычаги, в которых выполнены пазы, размещенные по дуге окружности, центр которой совпадает с осью шарнира крепления угового рычага, при этом оси шарниров крепления захватных рычагов также размещены на этой окружности, а в пазах размещены элементы механизма привода.
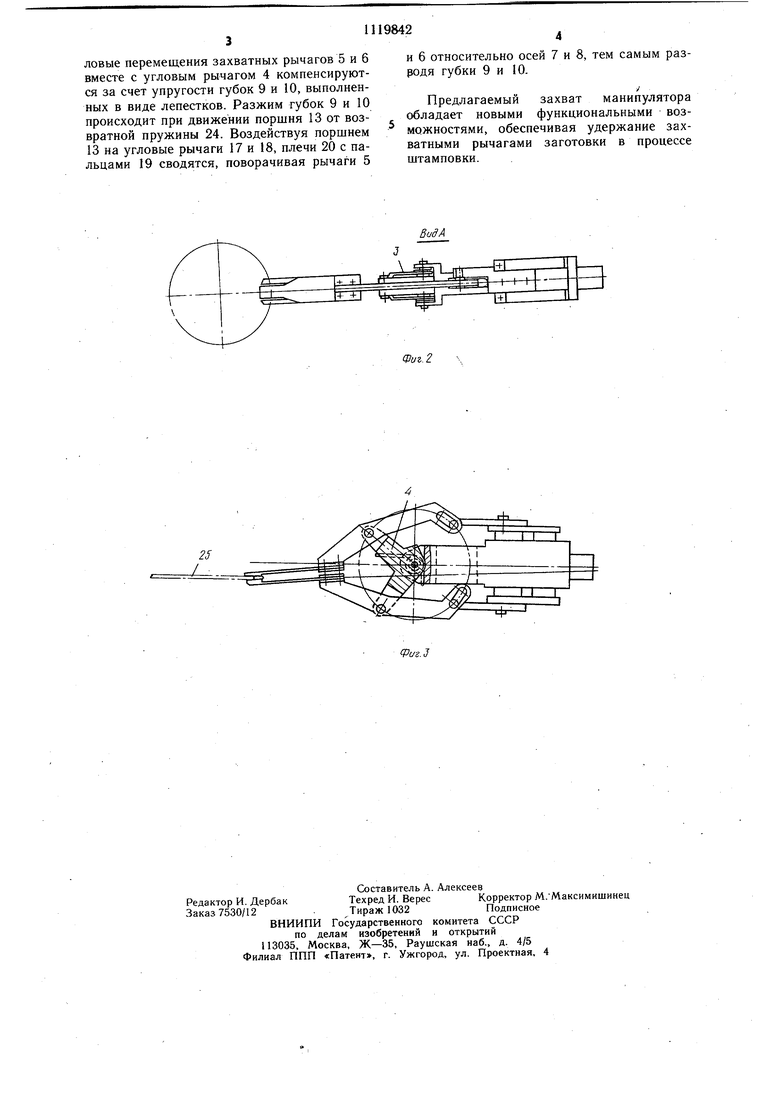
На фиг. 1 изображен схват, разрез; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - схват в момент принудительного, перемепхения заготовки в обрабатывающем штампе.
Схват содержит корпус 1, на котором пшрнирно смонтирован посредством оси 2 подпружиненный пружиной 3 угловой рычаг 4. Захватные двуплечие рычаги 5 и 6 установлены посредством соответственно осей 7 и 8 на концах подпружиненного углового рычага 4. Захватные рычаги 5 и 6 снабжены --убками, выполненными в виде упругих лепестков 9 и 10. Установленный на одном захватном рычаге 6 упругий лепесток 9 имеет вильчатую форму, а лепесток 10 па другом захватном рычаге 5 выполнен с пальце.м, входящим между выступами вилки.
Коппы захватных рычагов 5 и 6 противоположные губкам выполнены с дугообразными пазами 11, расположенными по окружности 12 с пентром на оси 2 углового рычага 4, на которой расположены оси 7 и 8 крепления этих рычагов, связанных поршнем 13 силового цилиндра 14 через промежуточные элементы, выполненные в виде установленных посредством осей 15 и 16 на корпусе I угловых рычагов 17 и 18, каждый из которых взаимодействует с пазами 11 посредством пальцев 19, закрепленных на плечах 20. Таким образом, оси пальцев 19 находятся на оси симметрии пазов 11
т.е. на окружности с центром на оси углового рычага 4. Другое плечо 21 угловых рычагов 17 и 18 взаимодействует с канавкой 22 на порщне 13 силового цилиндра 14 и при этом пропущено через отверстие в стакане 23 силового цилиндра 14. Цривод оснащен возвратной пружиной 24.
Схват работает следующим образом. При перемещении порщня 13 силового
цилиндра 14 влево сжимается возвратная пружина 24 и угловые рычаги 17 и 18 поворачиваются от воздействия на плечи 21 вокруг своих осей 15 и 16 относительно корпуса 1, при этом плечи 20 угловых рычагов
17 и 18, взаимодействующие с пазом 11, перемещаются по окружности вокруг своих осей 15 и 16, разводят концы с пазами 1 захватных рычагов 5 и 6, поворачивая их вокруг их осей 7 и 8 крепления на подпружиненном угловом рычаге 4, а пропивоположные концы захватных рычагов 5 и 6, оснащенные губками 9 и 10, сходятся и захватывают заготовку 25. Манипулятор (не показан) посредством схвата заносит заготовку 25 в рабочую зону штампа (не
показан) и помещает ее на некотором расстоянии от зеркала штампа.
При штамповке заготовки имеют место принудительные технологические перемещения заготовки верхней частью штампа
поперек плоскости, проходящей между захватными рычагами 5 и 6, с амплитудой до 5-6 мм, при этом заготовка должна быть удержана схватом с прежней силой при обеспечении свободы указанных принудительных технологических перемепьенин.
Таким образом, обеспечивается возможность извлечения отхода схватом после штамповки. При воздействии верхней половины штампа на заготовку и принудительных перемещениях ее Поперек плоскости, проходящей
между захватными рычагами 5 и 6, последние не меняя своего углового положения, поворачивают подпружиненный угловой рычаг 4 вокруг его оси 2, т.е. их ocii поворота перемеш.аются по окружности с центром на оси поворота подпружиненного углового
рычага 4, при этом пальцы рычагов 17 и 18 остаются в прежних положе 1иях, обеспечивая зажим заготовки 25, поскольку относительно пальцев 19, контактируюшие с ними поверхности пазов 11 захватных рычагов 5 и 6 перемещаются также по окружности с центром на оси шарнира углового рычага 4. При всех упомянутых перемещениях корпус 1 остается неподвижным.
Таким образом, во время штамповки заготовка удерживается захватпыми рычагами 5 и 6, при поворотах последних вместе с угловым рычагом 4 и при неподвижном корпусе 1. При этом, поскольку са.ма заготовка зажата при штамповке в штапке. углевые перемещения захватных рычагов 5 и б вместе с угловым рычагом 4 компенсируются за счет упругости губок 9 и 10, выполненных в виде лепестков. Разжим губок 9 и 10 происходит при движении поршня 13 от возвратной пружины 24. Воздействуя поршнем 13 на угловые рычаги 17 и 18, плечи 20 с пальцами 19 сводятся, поворачивая рычаги 5
и б относительно осей 7 и 8, тем самым разЭодя губки 9 и 10.
Предлагаемый захват манипулятора обладает новыми функциональными возможностями, обеспечивая удержание захватными рычагами заготовки в процессе штамповки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1986 |
|
SU1335450A1 |
| Очувствленный схват | 1985 |
|
SU1294602A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Устройство для автоматической смены инструмента | 1985 |
|
SU1323327A1 |
| Схват манипулятора | 1986 |
|
SU1495118A1 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
| Схват | 1981 |
|
SU975391A1 |
СХВАТ, содержащий корпус, захватные рычаги с губками и механизм привог да, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен щарнирно закрепленными па корпусе угловым рычагом, на плечах которого шарнирио размещены захватные рычаги, в которых выполнены пазы, размещенные по дуге окружности, центр которой совпадает с осью шарнира крепления углового рычага, при этом оси шарниров крепления захватных рычагов также размещены на этой окружности, а в пазах размещены элементы механизма привода.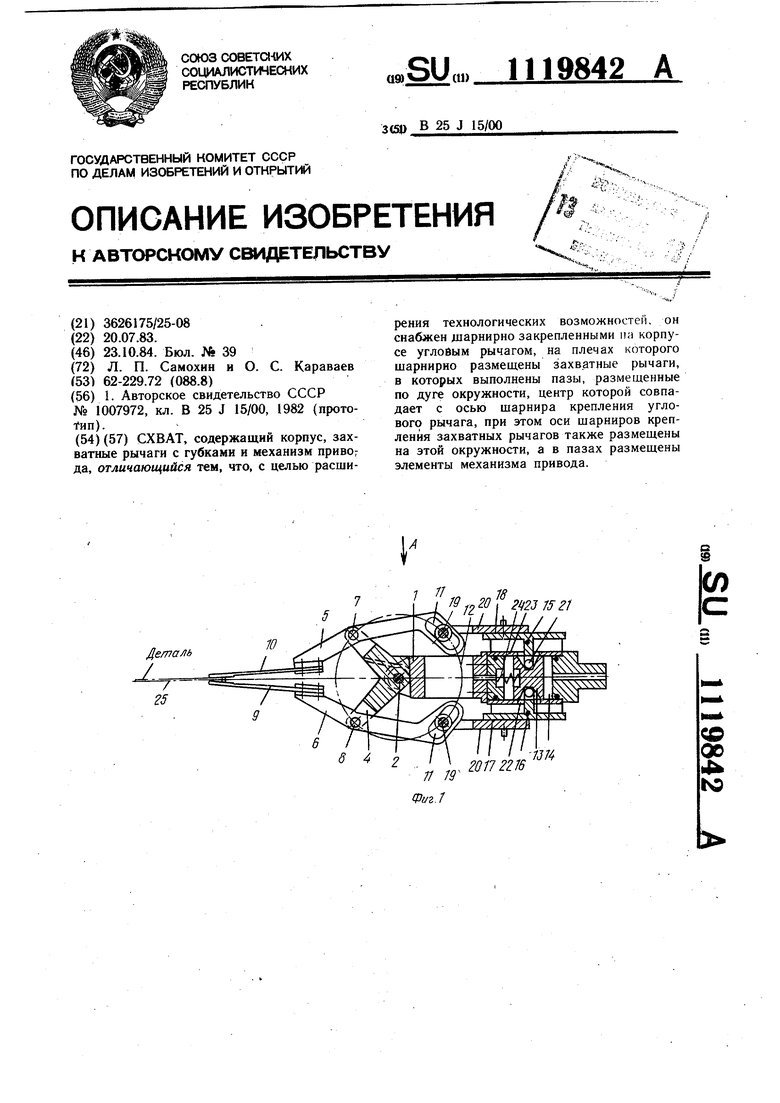
ВидА
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для захватывания деталей | 1982 |
|
SU1007972A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
