113
Изобретение относится к области машиностроения,а именно к схватам манипуляторов, например для металлорежущих станков.
Целью изобретения является упрощение конструкции пу1 ем устранения необходимости использовать отдельный привод.
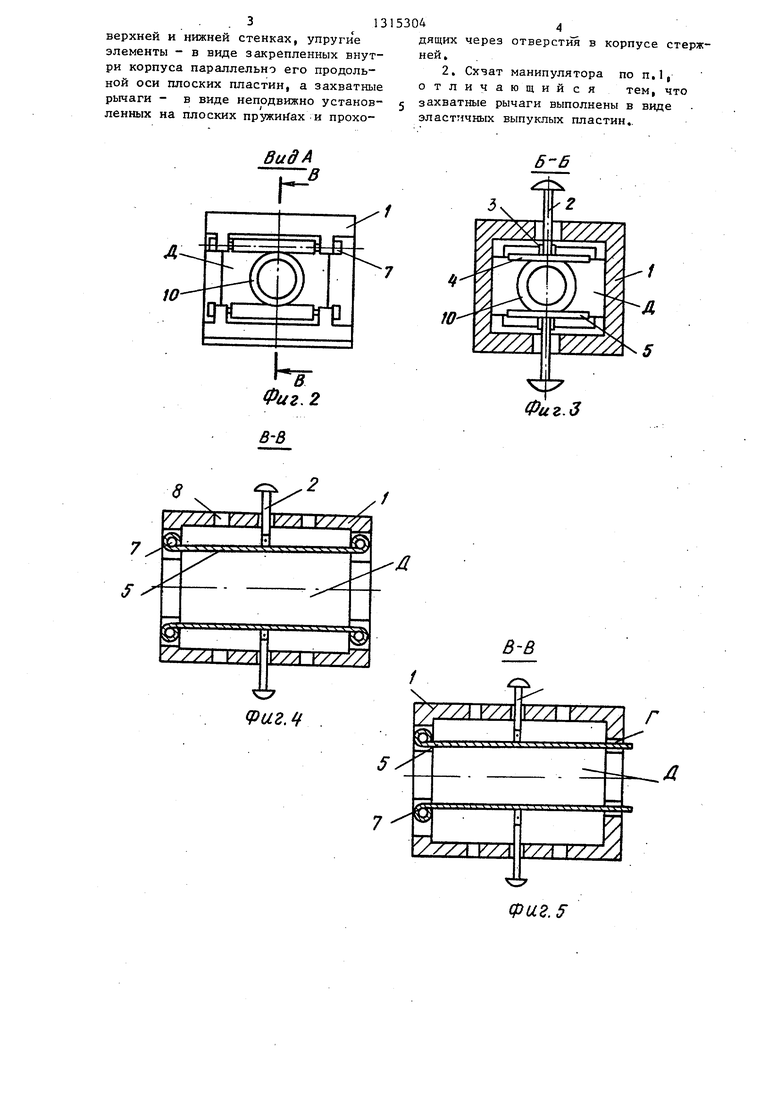
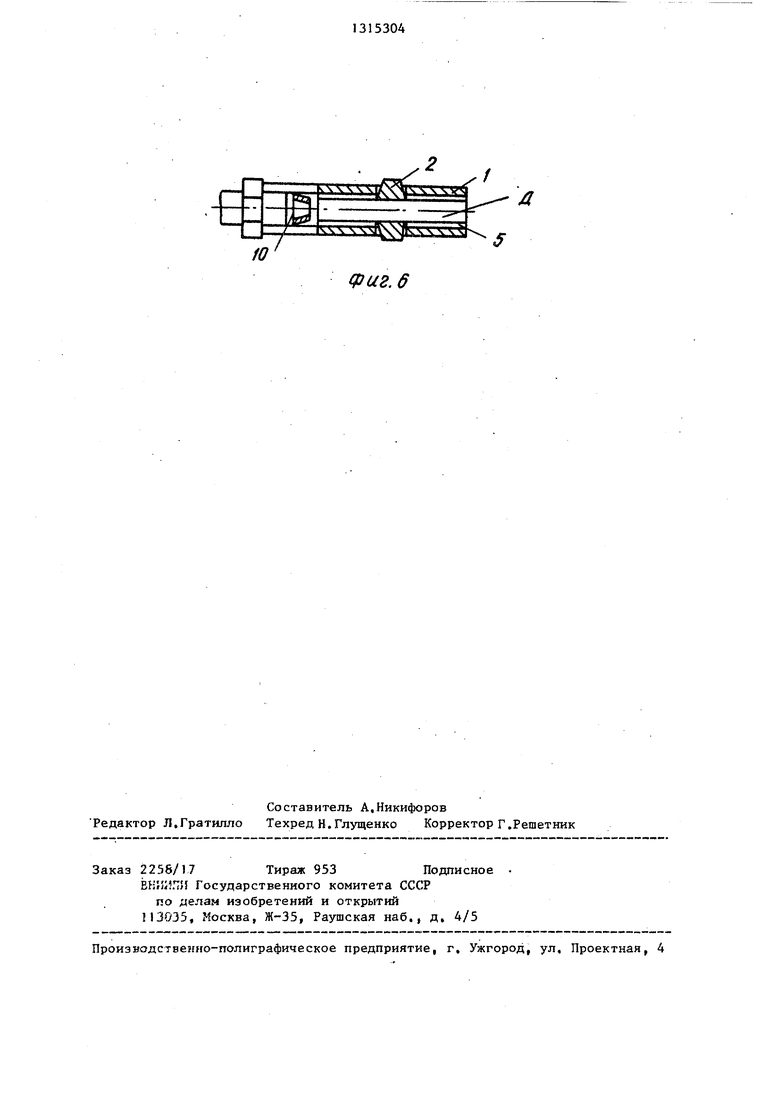
На фиг,1 изображен схват манипу-. лятора, общий вид; на фиг,2 - вид А на фиг.1; на фиг,3 - разрез Б-Б на фиг,1; на фиг,4 - разрез В-В на фиг,2 на фиг,5 - разрез В-В на фиг,2 (вариант закрепления упругих элементов на корпусе схвата); на фиг,6 - манипулятор с захватными рычагами, выполненными в виде эластичных выпуклых пластин, общий вид,
Схват манипулятора содержит выполненный в виде сквозной камеры прямоугольного сечения корпус 1, захватные рычаги 2, закрепленные при помощи оси 3 и вилки 4, жестко связанной с упругим элементом 5, Упругие элементы 5 выполнены в виде плоских пружин и закреплены на корпусе шарнирами 6, образованными осями 7 и отверстиями в корпусе 1, параллельно его продольной оси. Причем упругие элементы 5 жестко связаны с осями 7. Возможен вариант установки упругих элементов 5 СФиг,5), при котором одна сторона упругих элементов 5 фиксируется шарниром 6 (ось 7 и отверстия в корпусе 1, а другая сторона упругих элементов 5 свободно входит в прорези Г корпуса 1,
В корпусе 1 на его верхней и нижней стенках перпендикулярно упругим элементам 5 выполнены отверстия 8, обеспечивающие создание атмосферного давления под упругими элементами 5 и направление захватным рычагом 2 при закреплении детали 9,
Поток воздуха в камеру Д, образованную корпусом 1 и упругими элементами 5, подводится соплом 10, жестко связанным с корпусом 1, Захватные рычаги 2 могут быть выполнены в виде стержней (фиг,1) или в виде эластич цык выпуклых пластин (фиг,6 ), жестко связанных с упругими элементами 5
Схват работает следующим образом, Рука манипулятора (не показана ) со схватом перемещается на загрузочную позицию. Включается распределитель подачи воздуха (не показан ) в сопло 10 схвата манипулятора. При
4 2
этом поток воздуха попадает в камеру Д, образованную упругими элементами 5 и корпусом 1, Так как скорость протекания потока воздуха между упругиМИ элементами 5 велика, то в камере Д .оздается пониженное давление по сравнению с атмреферным давлением над упругими элементами 5, Причем разность давлений тем больше, чем
больще скорость, протекания потока воздуха упругими элементами 5, Под действием избыточного давления над упругими элементами 5 .последние прогибаются внутрь камеры Д, Захватные рычаги 2, связанные с упругими элементами 5, втянутся и схват манипулятора свободно войдет в отверстие захватываемой детали 9, При переключении распределителя подачи воздуха
подвод воздуха в сопло 10 прекращается. Давление в камере Д-поднимается до атмосферного и под действием упругих сил упругих элементов 5 последние займут исходное положение„
При этом захватные рычаги 2 выдвинутся и деталь 9 окажется зажатой. После переноса детали 9 включается подача воздуха, деталь освобождается и цикл работы схвата манипулятора
повторяется. Использование захватных рычагов 2 в виде эластичных выпуклых пластин необходимо в случаях захвата хрупких деталей 9 с целью обеспече- ния сохранности самих деталей 9 либо
поверхностей этих деталей.вследствие того, что после прекращения подачи сжатого воздуха в камеру Д выравнивание давления в последней с атмосферным происходит практически
мгновенно, Упругие элементы 5 под действием упругих сил занимают положение практически мгновенно, вследствие чего захват детали 9 происходит с ударом. Для компенсации этого
удара при захвате хрупких или легко - повреждаемых деталей устанавливаются захватные рычаги 2, выполненные в виде эластичных выпуклых пластин,
Формула изобретения
1, Схват манипулятора, содержаий корпус и закрепленные на упругих элементах захватные рычаги, отличающий ся тем, что, с целью упрощения конструкции, корпус выполнен в виде сквозной камеры прямогольного сечения с отверстиями на
3 13153044
верхней и нижней стенках, упругиедящих через отверстия в корпусе стержэлементы - в виде закрепленных внут-ней,
ри корпуса параллельно его продоль-2. Схчат манипулятора по п,1,
ной оси плоских пластин, а захватныеотличающийся тем, что
рычаги - в виде неподвижно установ-g захватные рычаги выполнены в виде
ленных на плоских пружинах и прохо-эластичных выпуклых пластин..
ВидА
б-В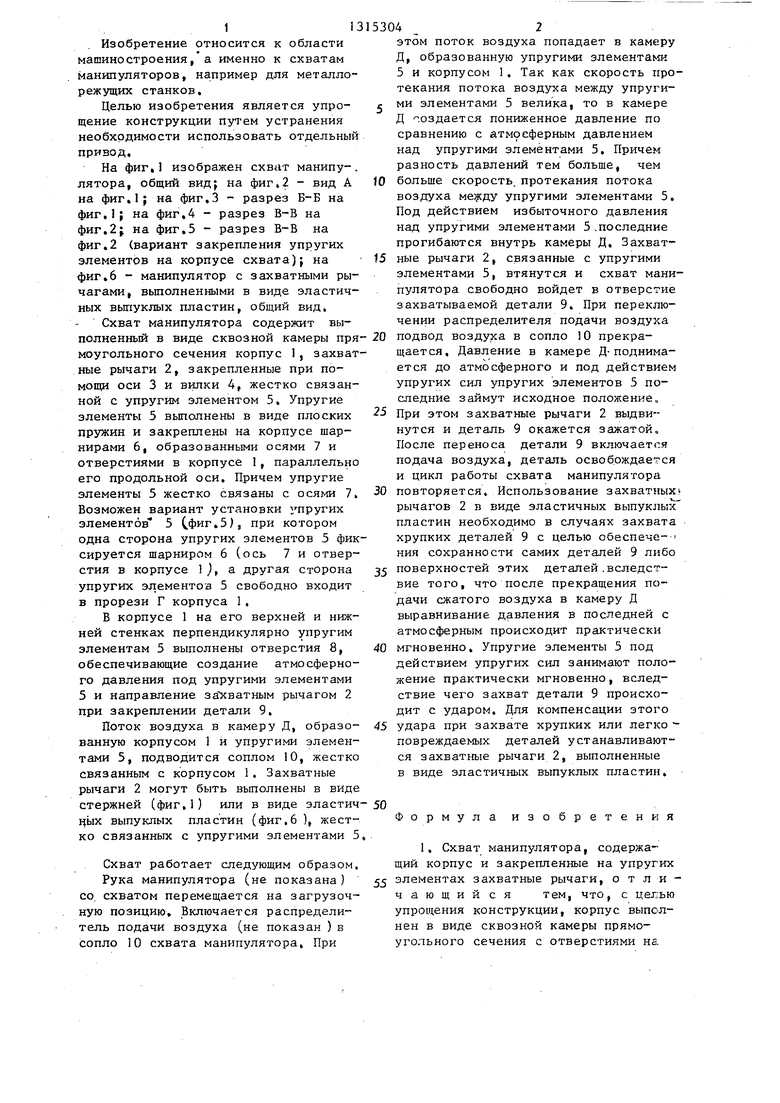
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1990 |
|
SU1787760A1 |
| Пневматический схват | 1984 |
|
SU1249813A1 |
| Губка схвата | 1987 |
|
SU1451002A1 |
| Схват промышленного робота | 1977 |
|
SU662344A1 |
| Устройство для захвата мягких деталей | 1989 |
|
SU1742189A1 |
| Загрузочное устройство | 1985 |
|
SU1315227A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Вакуумный схват | 1989 |
|
SU1763174A1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1990 |
|
RU2091208C1 |
| Схват манипулятора | 1990 |
|
SU1785896A1 |
Изобретение относится к области машиностроения, а именно к схватам манипуляторов, например, для металлорежущих станков. Изобретение позволяет упростить конструкцию путем устранения необходимости использования отдельного привода. В корпусе I, выполненном в виде сквозной камеры прямоугольного сечения с отверстиями 8 на верхней и нижней стенках размещены выполненные в виде плоских пружин упругие элементы 5, на которых закреплены захватные рычаги 2, предназначенные для взаимодействия с детсшью 9. Сжатый воздух подводится в корпус 1 через сопло 10. 1 з.п, ф-лы, 6 ил. -5 Л ел со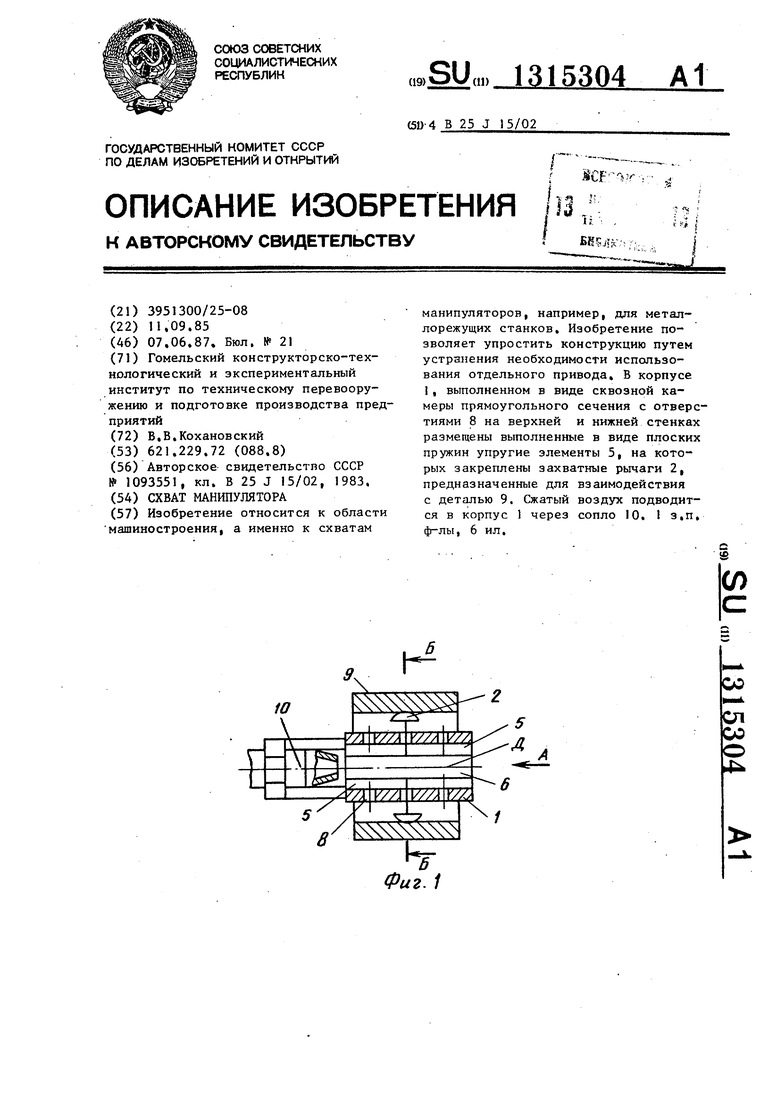
7
9иг.
-Д
В-в G
г
Фи.5
Е
:
SSS333 ;
:
sjs X ул
фиг. 6
Составитель А.Никифоров Редактор Л,Гратилло Техред Н.Глущенко Корректор Г.Решетник
Заказ 2258/17 Тираж 953 Подписное БНИИ.ТИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Произнодственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Схват манипуляционного робота | 1983 |
|
SU1093551A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
