г/: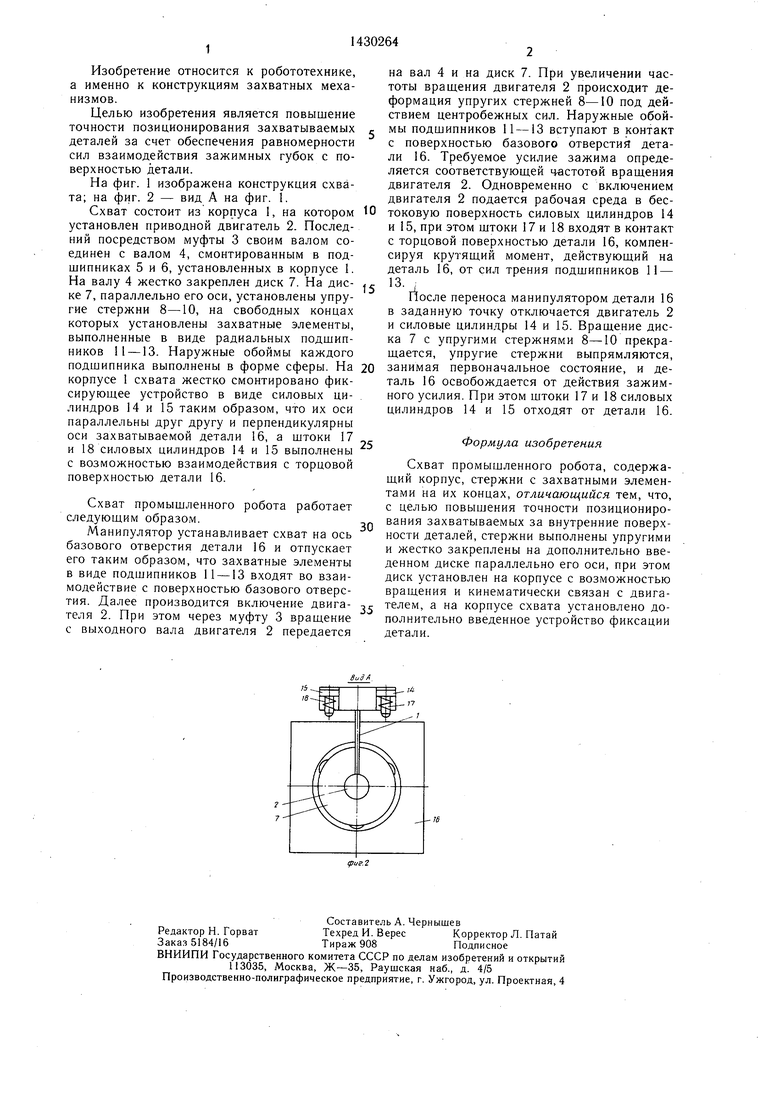
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1990 |
|
SU1761463A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Захватное устройство | 1984 |
|
SU1220793A1 |
| Схват | 1987 |
|
SU1511114A1 |
| Кисть манипулятора | 1987 |
|
SU1423372A1 |
| Захватное устройство | 1984 |
|
SU1268402A1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
Изобретение относится к робототехнике, а именно к конструкциям захватных механизмов. Целью изобретения является повышение точности позиционирования захватываемых деталей за счет обеспечения равномерности сил взаимодействия зажимных губок с поверхностью детали. Схват состоит из корпуса 1 с приводным двигателем 2, на валу которого жестко закреплен диск 7. На диске 7 жестко закреплены упругие стержни 8, 9 и 10, на концах которых установлены захватные элементы, выполненные в виде радиальных подшипников И, 12 и 13. При включении приводного двигателя 2 враш.е- ние передается на диск 7, При увеличении частоты врашения двигателя 2 происходит деформация упругих стержней 8, 9 и 10 под действием центробежных сил. При этом наружные обоймы подшипников 11, 12 и 13 вступают в контакт с поверхностью базового отверстия детали 16. Требуемое усилие зажима определяется соответствуюшей частотой враш,ения двигателя 2. Одновременно с включением двигателя 2 включается в работу фиксирующее устройство, контакти- руюшее с наружной поверхностью детали 16, компенсируя крутяший момент, действую- ший на деталь 16. 2 ил. S СЛ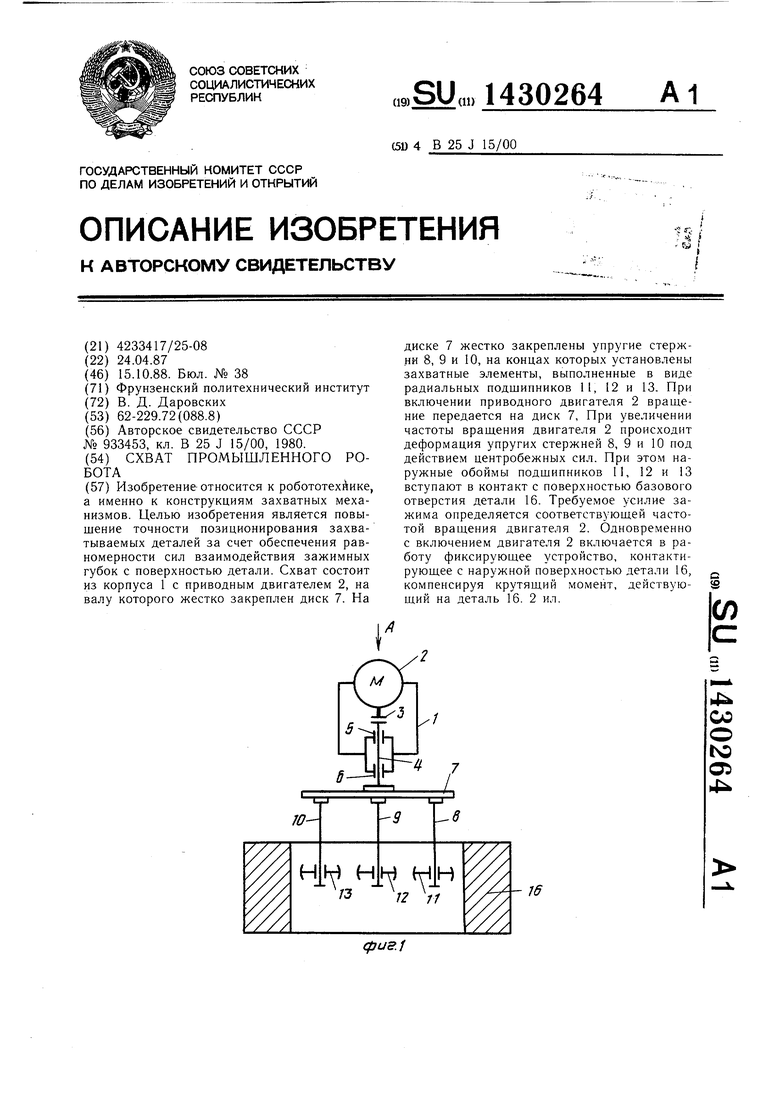
-У
Л7гН гг) гН 1т) ЬН М
3 2 V/
У
и
СО
о
N3
О5 н
.S
фие.1
Изобретение относится к робототехнике, а именно к конструкциям захватных механизмов.
Целью изобретения является повышение точности позиционирования захватываемых деталей за счет обеспечения равномерности сил взаимодействия зажимных губок с поверхностью детали.
На фиг. 1 изображена конструкция схва- та; на фиг. 2 - вид А на фиг. 1.
Схват состоит из корпуса 1, на котором установлен приводной двигатель 2. Последний посредством муфты 3 своим валом соединен с валом 4, смонтированным в подшипниках 5 и 6, установленных в корпусе 1. На валу 4 жестко закреплен диск 7. На дис- ке 7, параллельно его оси, установлены упругие стержни 8-10, на свободных концах которых установлены захватные элементы, выполненные в виде радиальных подшипников 11 -13. Наружные обоймы каждого подшипника выполнены в форме сферы. На корпусе 1 схвата жестко смонтировано фиксирующее устройство в виде силовых цилиндров 14 и 15 таким образом, что их оси параллельны друг другу и перпендикулярны оси захватываемой детали 16, а штоки 17 и 18 силовых цилиндров 14 и 15 выполнены с возможностью взаимодействия с торцовой поверхностью детали 16.
Схват промышленного робота работает следующим образом.
Манипулятор устанавливает схват на ось базового отверстия детали 16 и отпускает его таким образом, что захватные элементы в виде подшипников 11 -13 входят во взаимодействие с поверхностью базового отверстия. Далее производится включение двига- теля 2. При этом через муфту 3 вращение с выходного вала двигателя 2 передается
0
5
г
на вал 4 и на диск 7. При увеличении частоты вращения двигателя 2 происходит деформация упругих стержней 8-10 под действием центробежных сил. Наружные обоймы подшипников 11 -13 вступают в контакт с поверхностью базового отверстия детали 16. Требуемое усилие зажима определяется соответствующей частотой вращения двигателя 2. Одновременно с включением двигателя 2 подается рабочая среда в бестоковую поверхность силовых цилиндров 14 и 15, при этом штоки 17 и 18 входят в контакт с торцовой поверхностью детали 16, компенсируя крутящий момент, действующий на деталь 16, от сил трения подшипников 11 - 13. ..
После переноса манипулятором детали 16 в заданную точку отключается двигатель 2 и силовые цилиндры 14 и 15. Вращение диска 7 с упругими стержнями 8-10 прекращается, упругие стержни выпрямляются, занимая первоначальное состояние, и деталь 16 освобождается от действия зажимного усилия. При этом штоки 17 и 18 силовых цилиндров 14 и 15 отходят от детали 16.
Формула изобретения
Схват промышленного робота, содержа- ший корпус, стержни с захватными элементами на их концах, отличающийся тем, что, с целью повышения точности позиционирования захватываемых за внутренние поверхности деталей, стержни выполнены упругими и жестко закреплены на дополнительно введенном диске параллельно его оси, при этом диск установлен на корпусе с возможностью вращения и кинематически связан с двигателем, а на корпусе схвата установлено дополнительно введенное устройство фиксации детали.
-76
| Захват | 1980 |
|
SU933453A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
