Изобретение относится к машиностроению и может быть использовано в многоруких мани 1улпторах.
Цель изобретения - повышение надежности за счет обеспечения контроля за ноложе1и-1ем захватов и деталей в них.
На фиг. 1 ноказан .манипулятор, общий вид; на фиг. 2 - вид А на фиг. 1; на ()И1. 3 - разрез Б- Б на фиг. 2; на фиг. 4 - разрез В - В на фиг. 1 в нормальном режиме работы ма1П1нулятора; на фиг. 5 - то же, при аварийной ситуации; па фиг. 6 - разрез Г - Г па фиг. 2; на фиг. 7 - разрез Д--Д на фиг. 2; на фиг. 8 - разрез Е - Е па фиг. 1.
Манипулятор (фиг. 1) содержит основание 1, на котором с возможностью поворота и )адиального неремеп1ения установлены в корнусе механические руки 2 с захватами 3. В каждом захвате 3 выполнено отверстие 4, ось которого нересекается осью гнезда 5 для размещения изделия 6 (фиг. 4). В отверстии 4 устаноз.лен нодпружипенный пружиной 7 ступенчатый палец 8. имеюн1.ий меньндТО но диаметру ступень 9 и больн1у1О по диаметру ступень 10 нальца, расно.чоженную с возможностью взаимодействия с изделием 6.
При отсутствии изделия 6 в гнезде 5 захвата болыиая по диаметру ступень 10 нальца 8 расположена внутри гнезда 5, а меньн ая по диаметру ступень 9 выдвинута за пределы габаритов захвата 3 (фиг. 5). Каждый захват снабжен поднружиненным фиксатором 1 1.
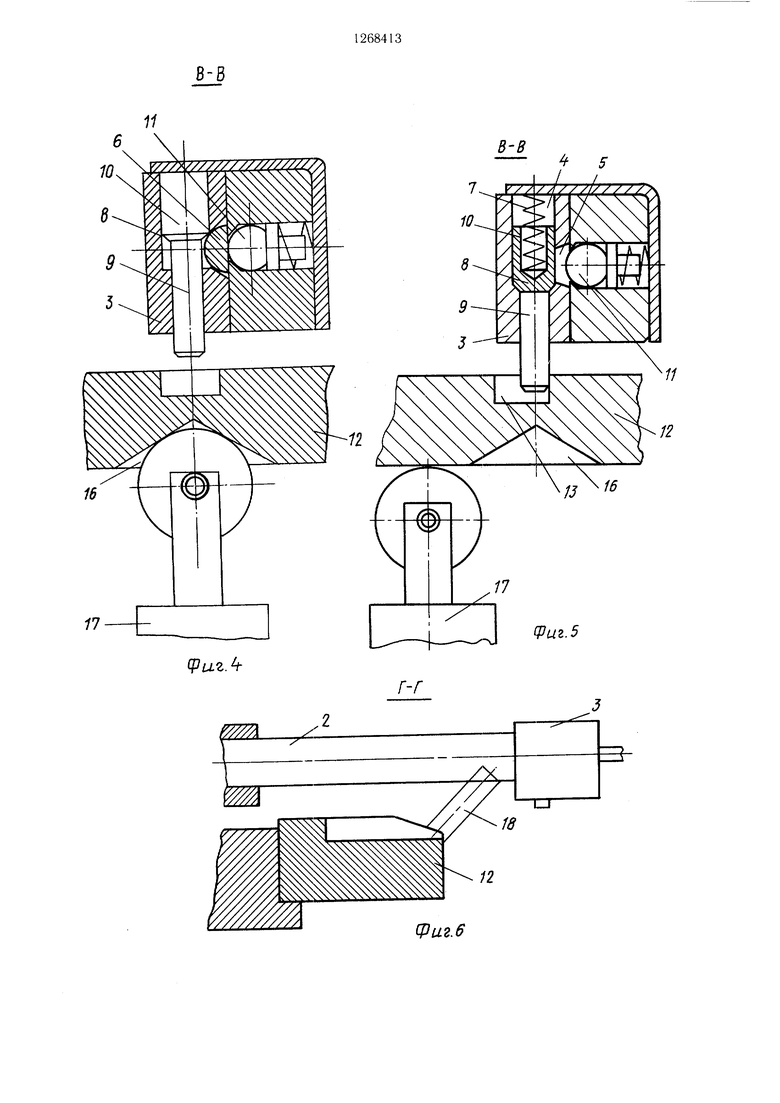
На осповании 1 с возможностью поворота установлено кольцо 12, имеющее на торце радиальные назы 13 и радиальную секторную выемку 14, вьпюлненную между позициями загрузка и выгрузка с глубиной, равной высоте назов (фиг. 2). На основании 1 с возможностью взаимодействия с пальцами 8 установлен ролик 15. На другом торце кольца 12 вынолнена выемка 16, а на основании закреплен датчик 17, чувствительный элемент которого взаимодействует с указанной выемкой.
На боковой поверхности кольца но числу механических рук закреплены уноры 18 и 19, смен1, в окружном направлении относито льно осей рук. При этом упоры 18 расположены ниже уровня расположения продольпых осей механических рук, а упор 19 - вьине этого уровня (фиг. 1 и 2).
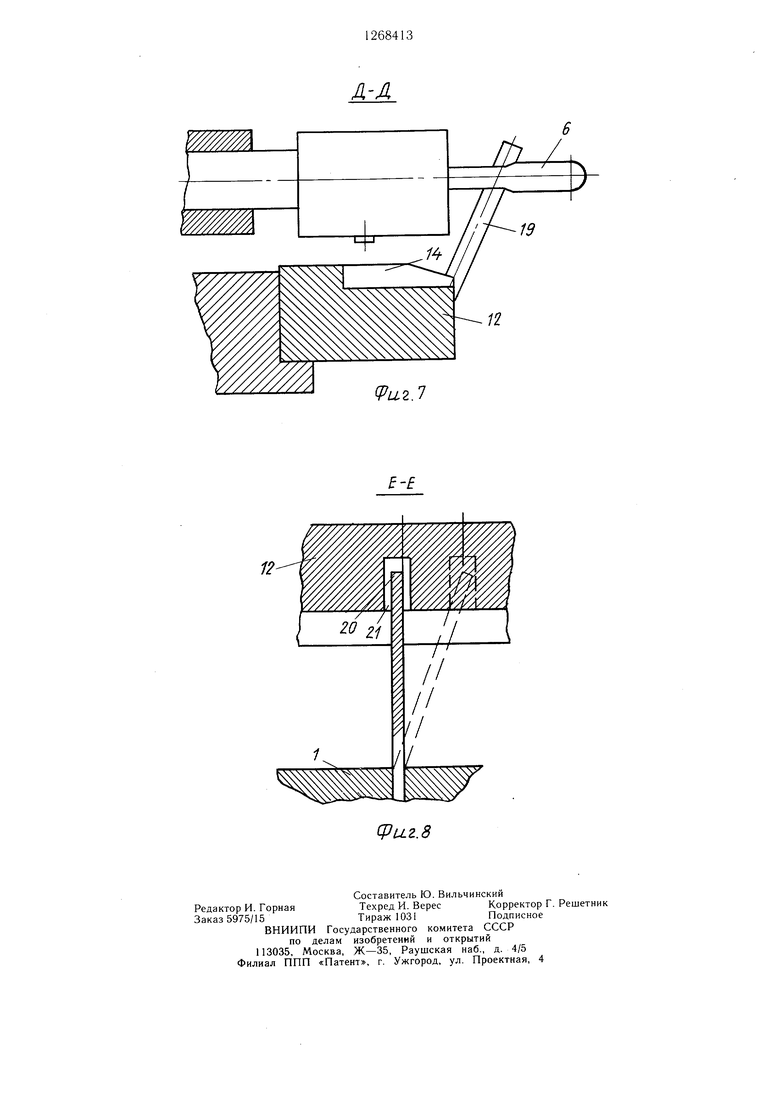
На основании 1 также закреплена нлоская пружина 20, расноложенная свободным концом в нрорези 21, выполненной на торце кольца 12 (фиг. 8).
Манипулятор работает следующим образом.
В нормальном реж1-ьме работы .манипулятора каждая рука 2 на технологической позиции выдвигается вперед и переносит изделие 6 в зону обработки, а затем задвигается в исходное ноложение и новорачивается на следующую технологическую нозицию, и так далее.
Размещенный в гнезде 5 захвата 3 конец изделия 6 контактирует со стуненью 10
подпружиненного нальца 8 и, тем самым, нрепятствует его выдвижению за пределы габаритов захватов под действием пружин 7. Во время радиального перемещения захватов 3 нальцЕ) 8 располагаются над соответствующими радиальными назами 13
кольца 12 и при повороте рук 2 проходят над указанным кольцом и закрепленными на нем упорами 18 (фиг. 3 и 4). В случае, если захват 3 не задвигается в исходное ноложение, он при повороте корпуса встунает в контакт с упором 18 (фиг. 6). При этом нроисходит поворот кольца 12 на основании 1, и емен1ение выемки 16 относительно датчика 17 дает сигнал на отключение манипулятора (фиг. 5).
При заклинивании изделия 6 на рабочей позиции нроисходит его произвольный съем с захвата 3 при радиальном перемещении руки в исходное ноложение. В этом случае налец 8 под действие.м пружины 7 перемещается в отверстии 4 за пределы габаритов захвата, заходит в соответствующий паз 13 кольца 12 (фиг. 5) и при последующем повороте корнуса с .механическими руками поворачивает кольцо 13, при этом срабатывает датчик 17, и манипулятор останавливается.
В случае, если изделие 6 на 110зиции выгрузка не извлекается из захвата 3 манипулятора, механичеекая рука 2 перемещается в исходное положение вместе с эти.м изделием, и при последующем повороте изделие взаимодействует с унором 19, поворачивая при этом кольцо 12 (фиг. 7) и давая команду на останов.
Когда изделие 6 извлекается из манипулятора на позиции выгрузкаТ налец 8 под действием пружины 7 выдвигается за нределы габаритов захвата 3 и при радиальном перемещении в исходное положение руки 2 располагается в секторной выемке 14. При дальнейшем повороте руки 2 выдвинутый палец 8 беспрепятственно пере.мещается в
выемке 14 на нозицию загрузка
В процессе последующего радиального выдвижения этой руки 2 на позиции загрузка палец 8 взаимодействует с роликом 15, носредстом которого вводится внутрь отверстия 4 и освобождает тем самым гнездо 5 для приема нового изделия.
Формула изобретения
Манипулятор, содержащий основание, механические руки с захватами, смонтированные с возможностью радиального перемещения на новоротном относительно основания корпусе, и привод, отличающийся
тем, что, с целью повышения надежности за счет обеспечения контроля за положением захватов и деталей в них, он снабжен кольцом, размещенным на основании соосно корпусу с возможностью поворота относительно основания и подпружиненным относительно него, причем на боковой поверхности кольца соответственно числу механических рук закреплены упоры, рабочая поверхность одного из которых расположена выше продольных осей механических рук, а рабочие поверхности других - ниже, причем все упоры смещены в окружном
Выгрузка
v
/3
направлении относительно тех же осей, на торцовой поверхности кольца со стороны корпуса выполнены радиальные пазы, а с противоположного торца - выемка, причем на каждом захвате установлен подпружиненный относительно дополнительный ступенчатый палец с возможностью взаимодействия с радиальными пазами кольца, а на основании закреплены упор и датчик, причем упор установлен с возможностью взаимодействия со ступенчатыми пальцами, а чувствительный элемент датчика размещен в выемке кольца.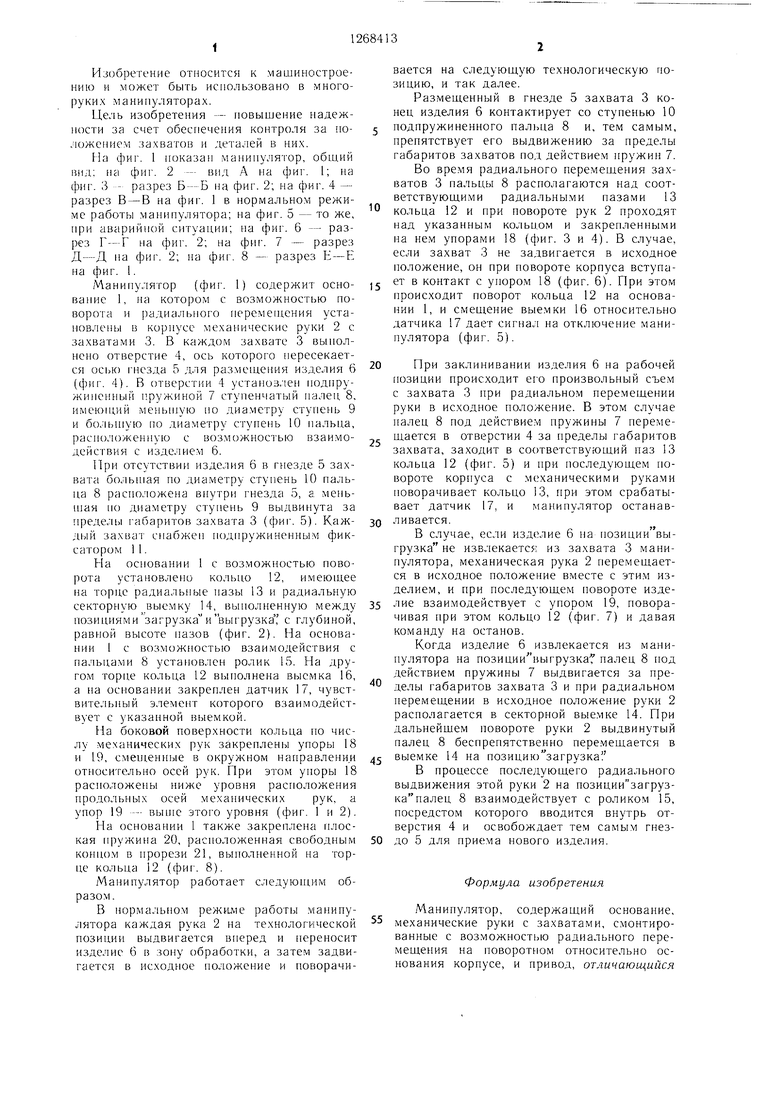
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1395477A2 |
| Манипулятор | 1984 |
|
SU1222536A1 |
| Манипулятор | 1986 |
|
SU1437213A1 |
| Транспортная система автоматизированной линии сборки | 1986 |
|
SU1495071A1 |
| Сборочный автомат | 1984 |
|
SU1273227A1 |
| УСТРОЙСТВО для ПЕРЕДАЧИ ШТУЧНЫХ ГРУЗОВ с КОНВЕЙЕРА НА РАБОЧЕЕ МЕСТО | 1971 |
|
SU316619A1 |
| Стыковочное устройство | 1986 |
|
SU1380939A1 |
| УСТРОЙСТВО для ГЕРМЕТИЗИРУЮЩЕГОКОРОБОКПОКРЫТИЯ | 1971 |
|
SU293642A1 |
| Манипулятор | 1991 |
|
SU1813620A1 |
| Манипулятор | 1980 |
|
SU1166877A1 |

Изобретение относится к области машиностроения и может быть иснользовано в многоруких манипуляторах для повышения их надежности за счет обеспечения контроля за положением захватов и деталей в них. Манипулятор содержит основание 1, на котором с возможностью поворота установлено кольцо 12, и механические руки 2, в захватах 3 которых находятся изделия 6. На боковой поверхности кольца закреплены упоры 18 и 19. На основании также закреплены датчик 17, возвратная пружина 20 и ролик 15. При повороте механических рук 2 в.случае нарушения заданной программы работы изделия 6 или механические руки 2 взаимодействуют с упорами 18 или 19, кольцо 12 поворачивается относительно основания 1 и датчик 17 выключает манипулятор. 8 ил. (Л IsD Oi 00 4 00
(Риг. 5
| Рабинович А | |||
| Н | |||
| и др | |||
| Сборочные машины непрерывного действия | |||
| - К.: Те.хника, 1965, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
