Изобретение относится к промышленному транспорту, а именно к нередаюш,им устройствам.
Известны устройства для передачи штучных грузов с конвейера на рабочее место, содержаш,ие подъемно-опускной грузонесущий рычаг, поворотный в горизо 1тальной плоскости, установленный на вертикальном валу, связанном с нриводным механизмом. Однако в известных устройствах поворот захвата в горизонтальной плоскости и перемещение в вертикальном направлении осуществляются при помощи сложной системы рычагов и кулачков, в связи с чем затруднено обслуживанне.
Целью изобретения является унрощение конструкции устройства.
Это достигается тем, что грузонесущий рычаг жестко закреиле) на винтовой втулке, связанной с установленным на винтовой стойке валом рычага, а втулка выполнена с фланцем, на которо.м закреплен палец, взаимодействующий при вертикальном перемещении рычага с пазом в корпусе устройства и ограничительными упорами, установленными на пе.м, а также упор, взаимодействующий с конечными выключателями, сблокированными с приводным механизмом устройства, причем на ВИ1ГГОВОЙ стойке установлен диск с фрикционными кольцами, взаимодействующими с винTOBoii втулкой в крайнем верхнем положении рычага.
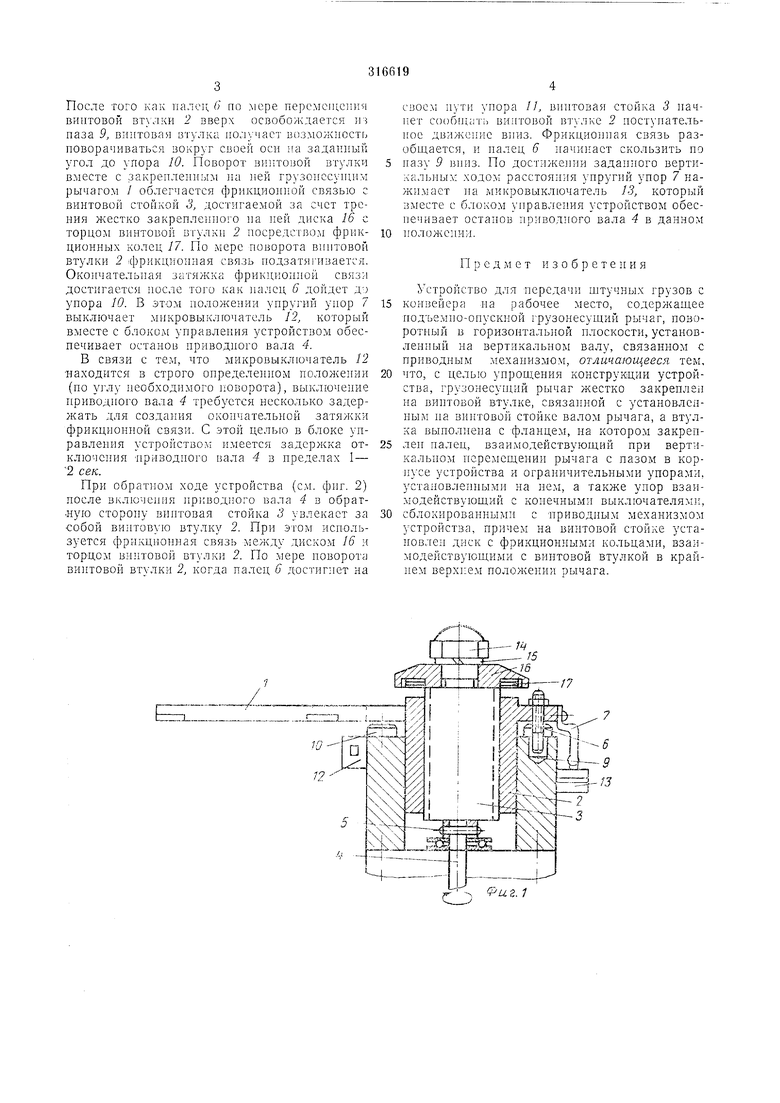
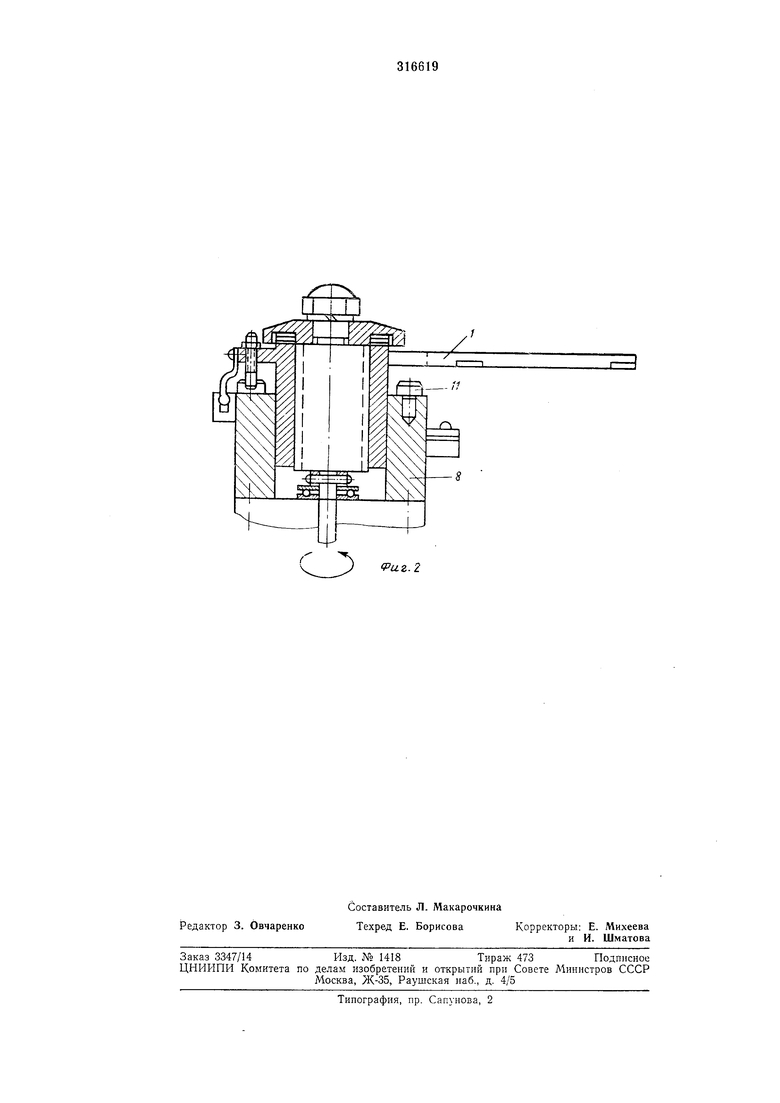
На фиг. 1 изображено описываемое устройство с нижним ноложеннем рычага; на 5 фиг. 2 - то же, с верхним положеннем рычага.
Устройство содержит грузонесущий рычаг /, жестко закрепленный на винтовой втулке 2, установленной на вннтовой стойке 3, которая
0 кинематически связана с приводным валом 4 посредством пальца 5. Винтовая втулка 2 вынолне 1а с фланцем, на котором установлен палец 6 и упругий упор 7. Виптовые стойка 3 и втулка 2 установлены в корпусе 8, выпол5 пенном с назом 9, в котором размещен цалец 6 (в нижнем положении рычага 7). На корпусе 8 находятся уноры 10 и 11 и конечные выключатели 2 и 13. На винтовой стойке 3 с помощью гайки 14 и пружинной шайбы 15
0 укреплен диск 16 с фрикционными кольцами /7. В исходном положении (см. фиг. 1), соответствуюн1,ем прнему (выдаче) изделий с грузонесун1,его рычага 1 на движущуюся лег1TV конвейера, при автоматическом включении
5 приводного вала 4 вращение при помощи пальца 5 передается винтовой CToiiKe 3, которая сообн1,ает ноступательное движение вверх винтовой втулке 2. Ограничителе.м от нроворо- та винтовой втулки 2 служит при этом палец
После того как палец 6 по мере персмсщсппя впптовой втулки 2 вверх освобождается из паза 9, винтовая втулка получает возможиост ; поворачиваться вокрут своей оси на задапный угол до упора 10. Поворот винтовой втулки вместе с закрепленным )ia ией грузонссуии1лт рычагом / облегчается фрикционной связью с БИНТОВОЙ стойкой 3, достигаемой за счет трения жестко закреплениого иа пей диска 16 с торцом виитовой втулки 2 посредством фрикциониых колец 17. По мере поворота впптовой втулки 2 фрикцио11пая связь подзатягевается. Окончательная затяжка фриюиюнной связи достигается после того как палец 6 дойдет д ) упора 10. В этом положении упругий упор 7 выключает микровыключатель 12, который вместе с блоком управления устройством обеспечивает останов приводного вала 4.
В связи с тем, что микровыключатель 12 находится в строго определенном положении (ио углу пеобходпмого поворота), выключение приводного вала 4 требуется несколько задержать для создания окончательной затяжки фрикционной связи. С этой целью в блоке уиравлепия устройством имеется задержка отключепия приводиого вала 4 в пределах 1- 2 сек.
При обратном ходе устройства (см. фпг. 2) носле включепия приводного вала 4 в обратную сторону винтовая стойка 3 увлекает за собой винтовую втулку 2. При этом исиользуется фрикционная связь между диском 16 и торцом винтовой втулки 2. По мере поворота винтовой втулки 2, когда налец 6 достигнет на
своем нути упора //, винтовая стойка 3 начнет co()6niaTij винтовой втулке 2 поступательное движение вниз. Фрикционная связь разобщается, и иалец 6 начннает скользить ио назу 9 вииз. По достижеиии заданного вертикальным ходом расстояния упругпй упор 7 нажимает па микровыключатель 13, который вместе с блоком управления устройством обеспечивает останов приводного вала 4 в данном положении.
П р е д м е т и з о б р е т е н и я
Устройство для передачи штучных грузов с конвейера на рабочее место, содержащее подъемно-опускной грузонесущий рычаг, поворотпый в горизонтальной плоскости, установленный на вертикальном валу, связанном с приводным механизмом, отличающееся тем, что, с целью упрощения конструкции устройства, грузонесуни-ш рычаг жестко закреплен на винтовой втулке, связанной с установленным на ВИ1ГГОВОЙ стойке валом рычага, а втулка выиолпена с фланцем, на котором закреплен палец, взаимодействующий при вертикальном иеремещении рычага с назом в корпусе устройства и ограничительными упорами, установленными на нем, а также упор взаимодействующий с конечными выключателями, сблокированными с приводным механизмом устройства, причем на винтовой стойке установлен диск с фрикционными кольцами, взаимодействующими с винтовой втулкой в крайнем верх1:ем положении рычага.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для укладки в пакет чушек | 1989 |
|
SU1671581A1 |
| Устройство для упаковки в бумагу цилиндрических рулончиков медицинской ваты | 1955 |
|
SU103537A1 |
| Устройство для дозированной подачи заготовок | 1985 |
|
SU1284909A1 |
| Устройство для комплектации печатной корреспонденции | 1989 |
|
SU1678462A1 |
| Устройство для предотвращения аварийного падения кабины пассажирского лифта | 2024 |
|
RU2837921C1 |
| Устройство для передачи изделий с одного конвейера на другой | 1977 |
|
SU719947A1 |
| ПРИВОДНОЕ УСТРОЙСТВО к ШВЕЙНОЙ МАШИНЕ | 1972 |
|
SU357300A1 |
| Отвалообразователь землеройной машины | 1990 |
|
SU1758177A2 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1938 |
|
SU57816A1 |
| Судовое спускоподъемное устройство для плавсредств | 1987 |
|
SU1498704A2 |
i .. 1
С-;)
Ри.г.2
