(Л
с
tr Т2 KS
со
СО
ел
4 vl
N)
Изобретение относится к машиностроению и может быть использовано в многоруких манипуляторах для автоматизации технологических операций
Цель изобретения - увеличение надежности за счет предохранения от поломок механических рук при их радиальном вьщзижении
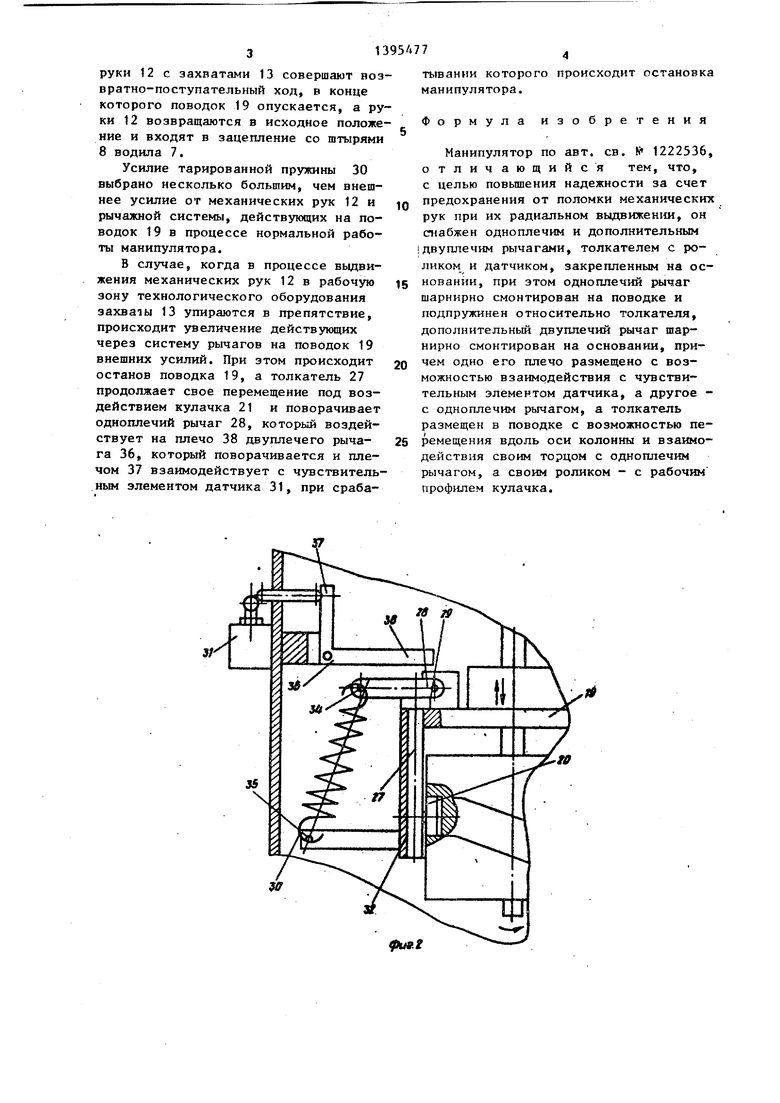
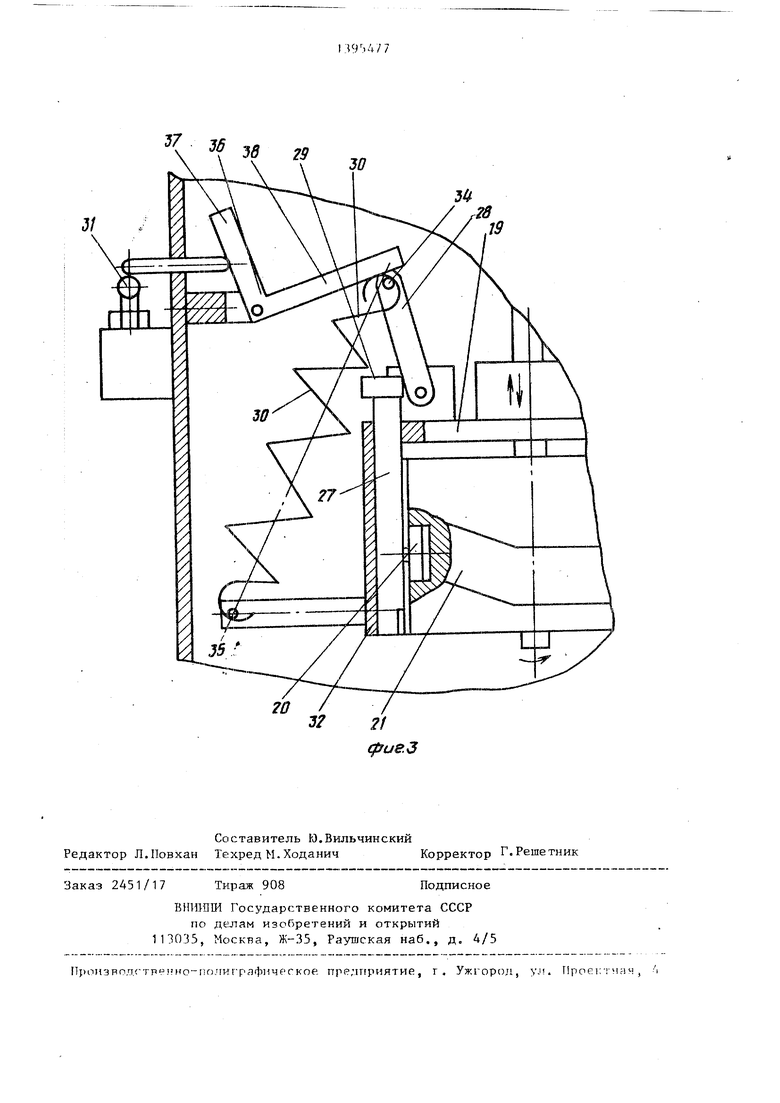
На фиг.1 показан манипулятор, Общий ВИД1 на фиг.2 - предохранитель- jjujft механизм, исходное положениеj на фиг.З - предохранительный механизм 4ри его срабатьшании.
I Манипулятор (фнг.1) содержит основ|ание 1, на котором посредством ребер 2 закреплен цилиндрический корпус 3,, в|нутри которого на по;1шипниках 4 установлена колонна 3, соединенная через зубчатое колесо 6 с приводом. : В. верхней части колонны 5 закреп- л;ено водило 7 с диаметрально рЬсположеннымн штырями 8 и смонтиро- sIfLHa подшипниковая опора 9, на кото- ррй установлен фланец 10 с радиаль- н|.1ми направляющими 11, В каждой на- п авляющей 11 устан:озх ена с возмож- н|)стью продольного пер 1мещения механ еская рука 12, на одном конце ко- тфрой установлен захват 13, а на другфм - налец 14 с роликом 14. 3 задвинутом положении рук две диаметрально противоположные из них контактируют с ; соответствующими :ш гь5ря {и 8 водила 7
Под механическими руками 12 на оснОвании 1 закреплен диск 16., в котором ПС числу захватов выполнены радиальные прорези 17.
Манипулятор содержит механизм горизонтально i-o перемещения захватов, включающий ползушки 18, систему рычагов и поводок 19s установленный на корпусе 3 с возможностью осевох о перемещения и связанный через ролик 20 с кулачком 21 f закре:аленным на колонне 5.
Ползушки 18 подвижно установлены в радиальных прорезях 17 и сквозные пазы 22, выполненные перпен- д цсулярно их продольнм 1 осям и предназначенным для взаглмодействия с роликами 15 мехси1ических рук 12.
Каждая ползушка 18 соединена через шарнирно связанные Jeждy собой тянущий рычаг 23, ведущей рычаг 24 и приводной рычаг 23 с поводком 19. Ведущие ры чаги 24 шарнирно закреплены на соответствующих ползунах 26, смонти0
Q
5
О
5
0
5
.
рованных на основании I с возможностью радиального перемещения.
Предохранительный механизм включает толкатель 27, расположенный на поводке 19 с возможностью осевого перемещения, одноплечий рычаг 28, подпружиненный к торцу 29 одного из концов толкателя посредством тарированной пружины 30 и закрепленный . основании 1 датчик 31. Толкатель установлен в направлякицих 32, saKiJiii:- ленных на поводке 19, а на его другом конце 33 установлен ролик 20, контактирующий с кулачком 21,. Одноплечий рычаг 28 одним концом шарнирно связан с поводком 19, а пружина 30 установлена на его свободном конце 34 и штифте 35, закрепленном на направляющих 32. На основании 1 шарнирно смонтирован двуплечий рычаг 36, одно плечо 37 которого размещено с возможностью воздействия с чувствительным элементом датчика 31, а другое плечо 38 расположено над рычагом 28 на расстоянии, равном величине рабочего хода поводка 19.
Манипулятор работает следующим образом.
После включения привода колонна 5 и кулачок 21 через зубчатое колесо 6 приводятся во вращение, Под действием штырей 8 водила 7 это вращение
передается фланцу 10 и, следовательно,, механическим рукам 12 с захватами 13, которые поворачиваютс-я с одной рабочей позиции на другую. Одновременно с этим кулачком 21 перемещается по ролику 20 и при подходе рук 12 к рабочим ПОЗШ4ИЯМ манипулятора осуществляет осевое перемещение толкателя 27, который воздействует на одноплечий рычаг 28 и чераз него переме- щает поводок 19 вверх по неподвижному корпусз 3.
В момент захода роликов 15 рук 12 в пазы 22 соответствующих ползу- шек 18 под действием поводка 19 про- исзсодит поворот рычагов 25, 24 и 25 вокруг своих шарниров и перем«.щение ползушек 18 с механическими руками 12 вдоль радиальных прорезей 17 диска 16. При радиальном перемещении рук 12 происходит их выход из зацепления со штырями 8 водила 7 и разъединение фланца 10 с колонной 5. В этом положении манипулятора фланец 10 остается неподвижным относительно вращшэдейся колонны 5, а механические
руки 12 с захватами 13 совершают возвратно-поступательный ход, в конце которого поводок 19 опускается, а руки 12 возвращаются в исходное положение и входят в зацепление со штырями 8 водила 7.
Усилие тарированной пружины 30 выбрано несколько большим, чем внешнее усилие от механических рук 12 и рычажной системы, действующих на поводок 19 в процессе нормальной работы манипулятора.
В случае, когда в процессе выдвижения механических рук 12 в рабочую зону технологического оборудования захва1Ы 13 упираются в препятствие, происходит увеличение действующих через систему рычагов на поводок 19 внешних усилий. При зтом происходит останов поводка 19, а толкатель 27 продолжает свое перемещение под воздействием кулачка 21 и поворачивает одноплечий рычаг 28, который воздействует на плечо 38 двуплечего рычага 36, который поворачивается и плечом 37 взаимодействует с чувствительным элементом датчика 31, при срабатывании которого манипулятора.
происходит остановка
0
5
0
5
Формула изобретения
Манипулятор по авт. св. I 1222536, отличающийся тем, что, с целью повышения надежности за счет предохранения от поломки механических рук при их радиальном выдвижен1Ш, он сгиабжен одноплечим и дополнительным двуплечим рычагами, толкателем с роликом и датчиком, закрепленным на основании, при этом одноплечий рычаг шарнирно смонтирован на поводке и подпружинен относительно толкателя, дополнительный двуплечий рычаг шарнирно смонтирован на основании, причем одно его плечо размещено с возможностью взаимодействия с чувствительным элементом датчика, а другое - с одноплечим рычагом, а толкатель размещен в поводке с возможностью перемещения вдоль оси колонны и взаимодействия своим торцом с одноплечим рычагом, а своим роликом - с рабочим профилем кулачка.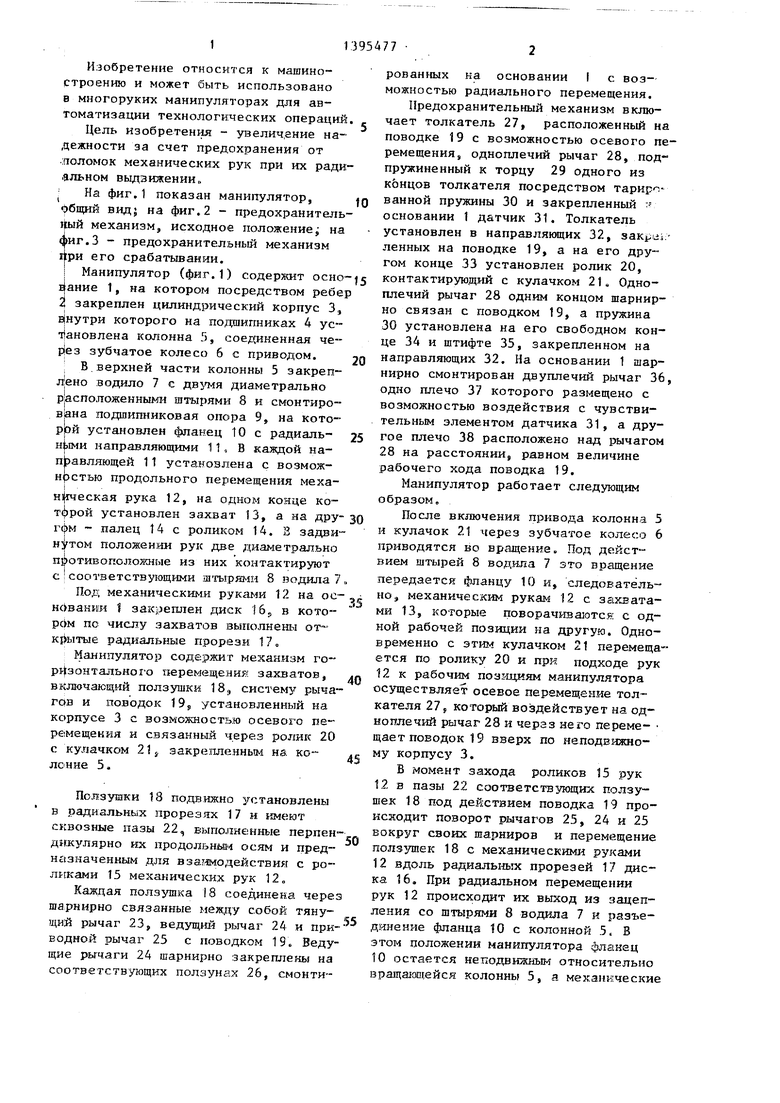
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1437213A1 |
| Манипулятор | 1984 |
|
SU1222536A1 |
| Вертикально-замкнутый тележечный конвейер | 1986 |
|
SU1364565A1 |
| Манипулятор | 1986 |
|
SU1328187A1 |
| Автомат для подготовки электрических проводов к монтажу | 1986 |
|
SU1464232A1 |
| Линия для динамической балансировки роторов электродвигателей | 1987 |
|
SU1490521A1 |
| Устройство для прерывистой подачи материала | 1971 |
|
SU515555A1 |
| Устройство для получения пружин с прямыми концами | 1979 |
|
SU869922A1 |
| Устройство для контроля жидкости в прозрачных ампулах | 1985 |
|
SU1453262A1 |
| Станок для срезания накладок тормозных колодок | 1987 |
|
SU1426709A2 |
Изобретение относится к области машиностроения и может быть использовано в многоруких манипуляторах для автоматизации технологических операций. Цель изобретения - увеличение надежности за счет предохранения от поломок механических рук или их радиальном выдвижении. При упоре захватов 13 в препятствие происходит увеличение усилий, действующих со стороны механической руки 12 через тянущий рычаг 23, ведущий рычаг 24 и приводной рычаг 25 на водило 19. При этом происходит останов водила 19, а толкатель 27 продолжает свое перемещение под воздействием кулачка 21 через ролик 20 и поворачивает одноплечий рычаг 28, который воздействует на плечо 38 двуплечего рычага, а плечо 37 этого рычага взаимодействует с чувствительным элементом датчика 31, при срабатьшании которого происходит остановка манипулятора. 3 ил. S
yff
fuf.
6
Э8 29
ЪЦ.
У8
W
| Манипулятор | 1984 |
|
SU1222536A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
