(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Манипулятор | 1983 |
|
SU1186464A1 |
| Манипулятор | 1975 |
|
SU503709A1 |
| Промышленный робот | 1986 |
|
SU1421523A1 |
| Манипулятор | 1983 |
|
SU1122502A1 |
| Промышленный робот | 1979 |
|
SU908242A3 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Манипулятор | 1989 |
|
SU1796335A1 |
1
Изобретение относится к машиностроению, .в частности к манипуляторостроению.
Известен манипулятор, содержащий механическую руку в виде шарнирно соединенных звеньев, силовой блок, состоящий из последовательно соединенных приводных модулей, выходные элементы которых кинематически связаны со звеньями руки 1.
Недостатком известного устройства является сложность конструкции силового блока, содержащего электродвигатели, связанные с дифференциальными планетарными зубчатыми механизмами.
Цель изобретения - повышение надежности и упрощение конструкции.
Поставленная цель достигается тем, что каждьш приводной модуль выполнен в виде силового цилиндра, суммирующего механизма и рычагов, при зтом в каждом модуле один из рычагов соединен со щтоком силового цилиндра и с зубчатым колесом суммирующего механизма своего модуля, а другой рычаг - с подвижной рейкой суммирующего Механизма предыдущего модуля.
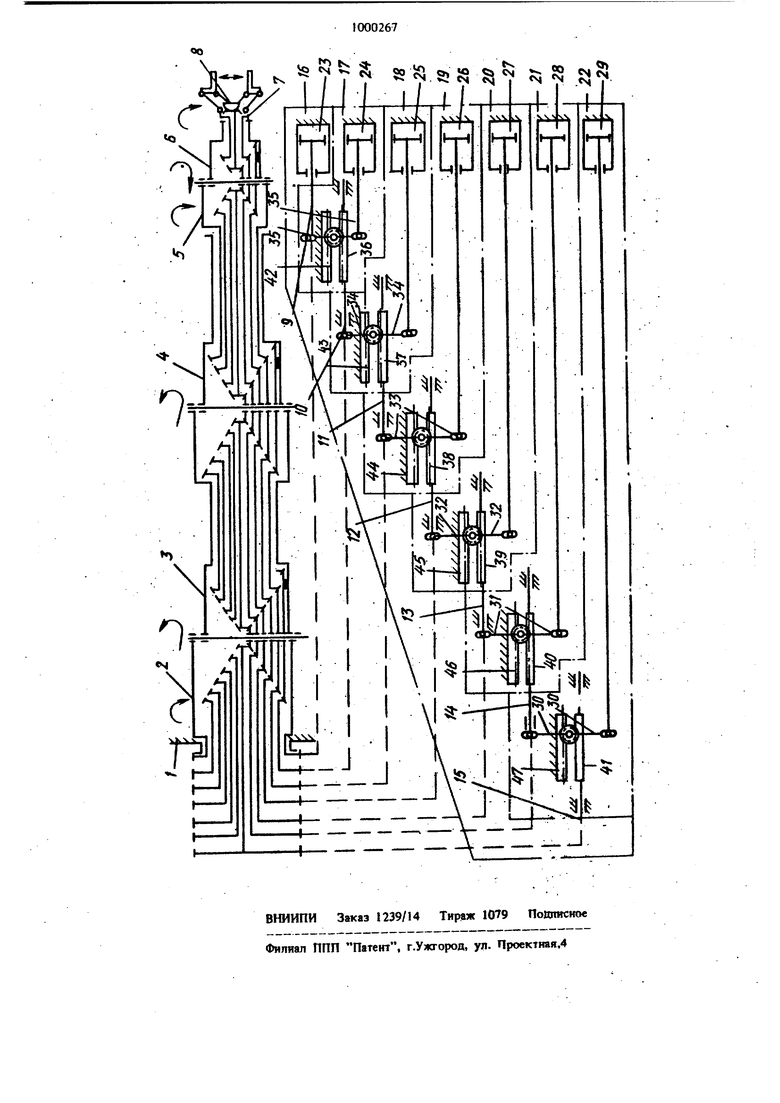
На чертеже показана принципиальная кинематическая схема предлагаемого манипулятора.
Манипулятор состоит из основания I, на котором щарнирно установлена механическая . рука, образованная последовательностью щарнирно соединенных звеньев 2-8, и силовой блок, содержащий приводные модули, связанные кинематическими цепями 9-15 со звеньями 2-8 руки. Кинематические передачи вы)Q полнены так, что их частные передаточные от ношения равны по/модулю и знаку.
Силовой блок состоит из семи модулей 16-22, -.оещшен-ных последовательно. Все модули 17-22, кроме первого модуля 16, вы,5 полнены одинаковыми. Каждый Модуль 17-22 содержит силовой цилиндр 23-29, а также рычаги 30-35, суммир)тощий механизм с зубчато-реечной передачей. Входные рычаги 30-35 жестко соединены - один со штоком
20 своего цилиндра 24-29, другой - с подвиж ной рейкой 36-41 предыдущего модуля, а на выходном рычаге щарнирно закреплено зубчатое колесо, входящее в зацепление с неподвижной 42-47 и подвижной 36-41 зуб3I0чатымн рейками. Попнижн я зубчятяя |х:йк 36-41 является выходным элементом приводийго модуля 16- 22. Аналогично образуется вся совокупность выходов звеньев 2 8 силового блока. Кинемати||еская связь модулей осушествлена так. что перемещение выходного рычага равно полусумме входных, а при обкатьюанин зубчатого колес по неподвижной рейке 42-47 выхошюй злеМент (по|шижим рейка 36-41) 11олу ает удвоенное пере меикние. Такнь образом, перемещение выходного зпемента равно сумме своего к предыдущего, что является необходимым и достаточным условием для компенсаиин вэаимбвлияния звеньев 2-8 механической руки. Вся совокуттость суммирующих рычажных механизмов и зубчато-р1еечных передач образует механизм компенсации.. . Майипулятор работает следующим образом. Прм пе|(емещении штоков силовых пилиидров 23-29 и, следовательно, входных рычагов 30-35 суммирующих . механизмов необхошмые силы .и крутящие моменты передаются через механизм компенсации к кинет-, тическне цепи 9-IS звеньев 2-8 руки так, что перемещение звена В относительно.-звена 7 зависит только от перемещения щтокш силового цнлиндра 29 модуля 22, относительное перемещение звеньев 7 и 6 - только от перемещения штока модуля 21 и так далее, наконец перемеШМне звена 2 относительно основания 1 зависит только от перемещения щтока модуля 16. 74 3t дистиглется м счет шкледовательного суммирсшання движений в приводных молулях 16- 22 механизма силового блока. Та1сим образом, в предлагаемой схеме маиипулятора исключено кинематическое взаимовлияние движений звеньев 2-8 руки с семью степенямн .подйижностн при одновременном упрощении конструкции механизма компенсации силового блока. Формула изобретения . . Манипулятор, соде ржащйй механическую руку в виде шарнирно соединенных звеньев, силовой блок, состоящий из последовательно соединенных прнводных модулей, выходные злементы которых кинематически связаны со звеньями руки, огличающнйся тем, что, с целью повышения надежности и упрощения конструкции, каждый приводной модуль выполнен в виде силового цилиндра, суммирующего механизма и рычагов, при зтом в каждом модуле один из рычагов соединеи со цгтоком снло1врго цилиндра и с зубчатым колесом суммирующего механизма своего модуля, а .другой рычаг - с подвнжиой рейкой суммирующего механизма предыдущего модуля. Источники информации, принятые во внимание при зкспертизе 1. Авторское свидетельство СССР N536955, кя. В 25 J 1/00, 1975.
